






反馈控制
[why] 抗干扰, 维持系统稳态值, 在开环增益A无穷大时, 可使得传递函数维持在1/F的确定稳定值 <-> 开环控制: 完全依赖开环增益A( 电路系统中值为Vout/Vin)
(证明如下: Vout为输出电压, Vin为输入电压, Vf为反馈电压( f-feedback ), A为开环增益, F为反馈 )
V
f
V
i
n
=
V
f
V
o
u
t
×
V
o
u
t
V
i
n
令
A
=
V
o
u
t
V
i
n
,
F
=
V
f
V
o
u
t
,
则
V
f
V
i
n
=
A
F
传
递
函
数
H
=
Y
X
=
V
o
u
t
V
i
n
+
V
f
=
V
o
u
t
V
i
n
V
i
n
V
i
n
+
V
f
V
i
n
=
A
1
+
A
F
当
A
→
∞
,
H
=
1
F
\frac{V_{f}}{V_{in}}=\frac{V_{f}}{V_{out}}\times\frac{V_{out}}{V_{in}}\\令A=\frac{V_{out}}{V_{in}},F=\frac{V_{f}}{V_{out}},则\frac{V_{f}}{V_{in}}=AF\\传递函数H=\frac{Y}{X}=\frac{V_{out}}{V_{in}+V_{f}}=\frac{\frac{V_{out}}{V_{in}}}{\frac{V_{in}}{V_{in}}+\frac{V_{f}}{V_{in}}}=\frac{A}{1+AF}\\当A\rightarrow\infty,H=\frac{1}{F}
VinVf=VoutVf×VinVout令A=VinVout,F=VoutVf,则VinVf=AF传递函数H=XY=Vin+VfVout=VinVin+VinVfVinVout=1+AFA当A→∞,H=F1
[基本公式]
u
(
x
)
=
K
p
(
e
(
t
)
+
1
T
i
∫
e
(
t
)
+
T
d
d
e
(
t
)
d
t
)
u(x)=K_p(e(t)+\frac{1}{T_i}\int e(t)+T_d\frac{de(t)}{dt})
u(x)=Kp(e(t)+Ti1∫e(t)+Tddtde(t))
其中Kp为比例系数,Ti为积分时间常量,Td为微分时间常量。
P比例控制
[proportional] 沿用一经典模型–小明倒水, 目标: 水面维持在一指定高度.
假设与目标倒水高度值的差距认为是△, 我们以K的比例系数( 认为K < 1 ), 即速度来填补此次差距△, 每次倒水K△, 因离散系统容易软件模拟( 指定次数 ), 也便于实际分析, 因实际无法做到时刻监视.
那么小明每一次的倒水动作都可以缩小与目标的差距, 在无穷大的时间内此差距一定被填满, 无穷接近目标值△. ( 证明如下: △≈∑K△n=K△ + K(△-K△) + K(△-2K△+K²△) + K(△-3K△+3K²△-K³△) + K(△-4K△+6K²△-K³△) + …)

I积分控制
[加入integration前] 可是, 水缸漏水! 如果水缸一次的漏水量 = 小明一次的填水量, 那么系统一直维持在△的差距, 即稳态误差. –漏斗 , 漏斗流水的时间为积分时间常量
小明一次加水量越大, 可抵抗漏水量也就越大, 即增大开环增益能减小系统稳态误差, 但系统的相对稳定性会降低,甚至造成闭环系统不稳定(振荡严重), 通常比例控制不单独使用。
[加入integration后] 离散情况下每次的误差累加, 再乘以比例系数Ki, 在稳态停滞在△情况下, 以Ki△逐步缩小误差, 步步逼近
D微分控制
[differentiation] 若对控制速度有要求, 上述积分比例未免太慢了, 因此引入微分控制–水缸开口, 水面越高水压越大, 水流走越快. 实现快速控制, 开口的低高为微分时间常量
但如果天降暴雨, 骤然加快放水速度又消失( 时域分析下 ).
( 频域分析下微分的拉普拉斯变缓为s, 在高频时区域无穷大, 放大高频噪声, 而积分的拉普拉斯变换为1/s, 吸收高频噪声 )
电路模型
因C=U/d, 电容值恒定, 则U∝d, Vin∝位移x

I
C
1
=
I
R
2
=
I
C
2
+
I
R
1
=
C
2
d
V
i
n
d
t
+
V
i
n
R
1
V
o
u
t
=
∫
I
C
1
d
t
C
1
+
I
R
2
R
2
=
C
2
C
1
V
i
n
+
R
2
C
2
d
V
i
n
d
t
+
R
2
R
1
V
i
n
+
1
R
1
C
1
∫
V
i
d
t
I_{C_1}=I_{R_2}=I_{C_2}+I_{R_1}=C_2\frac{dV_{in}}{dt}+\frac{V_{in}}{R_1}\\V_{out}=\frac{∫I_{C_1}dt}{C_1}+I_{R_2}R_2=\frac{C_2}{C_1}V_{in}+R_2C_2\frac{dV_{in}}{dt}+\frac{R_2}{R_1}V_{in}+\frac{1}{R_1C_1}∫V_{i}dt
IC1=IR2=IC2+IR1=C2dtdVin+R1VinVout=C1∫IC1dt+IR2R2=C1C2Vin+R2C2dtdVin+R1R2Vin+R1C11∫Vidt
可看作微分电路积分电路的叠加
积分器:
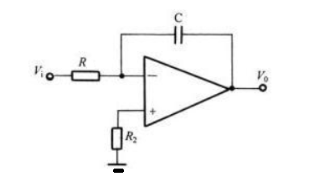
V
o
=
1
C
∫
I
C
d
t
=
−
1
C
R
∫
V
i
d
t
V_{o}=\frac{1}{C}∫I_{C}dt=-\frac{1}{CR}∫V_{i}dt
Vo=C1∫ICdt=−CR1∫Vidt
微分器:
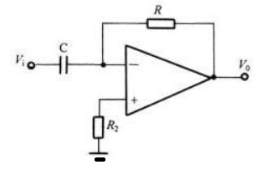
V
o
=
R
I
R
=
−
R
C
d
V
i
d
t
V_o=RI_R=-RC\frac{dV_i}{dt}
Vo=RIR=−RCdtdVi
详见模电课本6.5积分运算电路与微分控制电路















 3846
3846











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









