







CUDA程序错误检测
所有CUDA的API函数都有一个类型为cudaError_t的返回值,代表了一种错误信息;只有返回cudaSuccess时,才是成功调用。
- cudaGetLastError()用来检测核函数的执行是否出错
- cudaGetErrorString()输出错误信息
#include <stdio.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include<math.h>
#include <malloc.h>
#include <opencv2/opencv.hpp>
#include <stdlib.h>
#define BLOCK_SIZE 1
//图像卷积 GPU
__global__ void sobel_gpu(unsigned char* in, unsigned char* out, const int Height, const int Width)
{
int x = blockDim.x * blockIdx.x + threadIdx.x;
int y = blockDim.y + blockIdx.y + threadIdx.y;
int index = y * Width + x;
int Gx = 0;
int Gy = 0;
unsigned char x0, x1, x2, x3, x4, x5, x6, x7, x8;
if (x>0 && x<(Width-1) && y>0 && y<(Height-1))
{
x0 = in[(y - 1)*Width + (x - 1)];
x1 = in[(y - 1)*Width + (x)];
x2 = in[(y - 1)*Width + (x + 1)];
x3 = in[(y)*Width + (x - 1)];
x5 = in[(y)*Width + (x + 1)];
x6 = in[(y + 1)*Width + (x - 1)];
x7 = in[(y + 1)*Width + (x)];
x8 = in[(y + 1)*Width + (x + 1)];
Gx = (x0 + 2 * x3 + x6) - (x2 + 2 * x5 + x8);
Gy = (x0 + 2 * x1 + x2) - (x6 + 2 * x7 + x8);
out[index] = (abs(Gx) + abs(Gy)) / 2;
}
}
int main()
{
cv::Mat src;
src = cv::imread("complete004.jpg");
cv::Mat grayImg,gaussImg;
cv::cvtColor(src, grayImg, cv::COLOR_BGR2GRAY);
cv::GaussianBlur(grayImg, gaussImg, cv::Size(3,3), 0, 0, cv::BORDER_DEFAULT);
int height = src.rows;
int width = src.cols;
//输出图像
cv::Mat dst_gpu(height, width, CV_8UC1, cv::Scalar(0));
//GPU存储空间
int memsize = height * width * sizeof(unsigned char);
//输入 输出
unsigned char* in_gpu;
unsigned char* out_gpu;
cudaMalloc((void**)&in_gpu, memsize);
cudaMalloc((void**)&out_gpu, memsize);
cudaError_t error_code;
dim3 threadsPreBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 blocksPreGrid((width + threadsPreBlock.x - 1)/threadsPreBlock.x, (height + threadsPreBlock.y - 1)/threadsPreBlock.y);
cudaMemcpy(in_gpu, gaussImg.data, memsize, cudaMemcpyHostToDevice);
sobel_gpu <<<blocksPreGrid, threadsPreBlock>>> (in_gpu, out_gpu, height, width);
error_code = cudaGetLastError();
printf("Error: %s\n", cudaGetErrorString(error_code));
printf("FILE: %s\n", __FILE__);
printf("LINE: %d\n", __LINE__);
printf("Error code: %d\n", error_code);
cudaMemcpy(dst_gpu.data, out_gpu, memsize, cudaMemcpyDeviceToHost);
cv::imwrite("dst_gpu_save.png", dst_gpu);
//cv::namedWindow("src", cv::WINDOW_NORMAL);
cv::imshow("src", src);
cv::imshow("dst_gpu", dst_gpu);
cv::waitKey();
cudaFree(in_gpu);
cudaFree(out_gpu);
return 0;
}


樊哲勇大牛的检测CUDA运行时错误的宏函数:
#pragma once
#include<stdio.h>
#define CHECK(call) \
do \
{ \
const cudaError_t error_code = call; \
if (error_code != cudaSuccess) \
{ \
printf("CUDA Error:\n"); \
printf(" File: %s\n", __FILE__); \
printf(" Line: %d\n",__LINE__); \
printf(" Error code: %d\n",error_code); \
printf(" Error text: %s\n", cudaGetErrorString(error_code)); \
exit(1); \
} \
} while (0)
采用检测CUDA运行时错误的宏函数,图像卷积:
#include <stdio.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include<math.h>
#include <malloc.h>
#include <opencv2/opencv.hpp>
#include <stdlib.h>
#include "error.cuh"
#define BLOCK_SIZE 1
//图像卷积 GPU
__global__ void sobel_gpu(unsigned char* in, unsigned char* out, const int Height, const int Width)
{
int x = blockDim.x * blockIdx.x + threadIdx.x;
int y = blockDim.y + blockIdx.y + threadIdx.y;
int index = y * Width + x;
int Gx = 0;
int Gy = 0;
unsigned char x0, x1, x2, x3, x4, x5, x6, x7, x8;
if (x>0 && x<(Width-1) && y>0 && y<(Height-1))
{
x0 = in[(y - 1)*Width + (x - 1)];
x1 = in[(y - 1)*Width + (x)];
x2 = in[(y - 1)*Width + (x + 1)];
x3 = in[(y)*Width + (x - 1)];
x5 = in[(y)*Width + (x + 1)];
x6 = in[(y + 1)*Width + (x - 1)];
x7 = in[(y + 1)*Width + (x)];
x8 = in[(y + 1)*Width + (x + 1)];
Gx = (x0 + 2 * x3 + x6) - (x2 + 2 * x5 + x8);
Gy = (x0 + 2 * x1 + x2) - (x6 + 2 * x7 + x8);
out[index] = (abs(Gx) + abs(Gy)) / 2;
}
}
int main()
{
cv::Mat src;
src = cv::imread("complete004.jpg");
cv::Mat grayImg,gaussImg;
cv::cvtColor(src, grayImg, cv::COLOR_BGR2GRAY);
cv::GaussianBlur(grayImg, gaussImg, cv::Size(3,3), 0, 0, cv::BORDER_DEFAULT);
int height = src.rows;
int width = src.cols;
//输出图像
cv::Mat dst_gpu(height, width, CV_8UC1, cv::Scalar(0));
//GPU存储空间
int memsize = height * width * sizeof(unsigned char);
//输入 输出
unsigned char* in_gpu;
unsigned char* out_gpu;
cudaMalloc((void**)&in_gpu, memsize);
cudaMalloc((void**)&out_gpu, memsize);
dim3 threadsPreBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 blocksPreGrid((width + threadsPreBlock.x - 1)/threadsPreBlock.x, (height + threadsPreBlock.y - 1)/threadsPreBlock.y);
cudaMemcpy(in_gpu, gaussImg.data, memsize, cudaMemcpyHostToDevice);
sobel_gpu <<<blocksPreGrid, threadsPreBlock>>> (in_gpu, out_gpu, height, width);
CHECK(cudaMemcpy(dst_gpu.data, out_gpu, memsize*10, cudaMemcpyDeviceToHost));//增大size值 引起报错
cv::imwrite("dst_gpu_save.png", dst_gpu);
//cv::namedWindow("src", cv::WINDOW_NORMAL);
cv::imshow("src", src);
cv::imshow("dst_gpu", dst_gpu);
cv::waitKey();
cudaFree(in_gpu);
cudaFree(out_gpu);
return 0;
}

采用检测CUDA运行时错误的宏函数,矩阵相加:
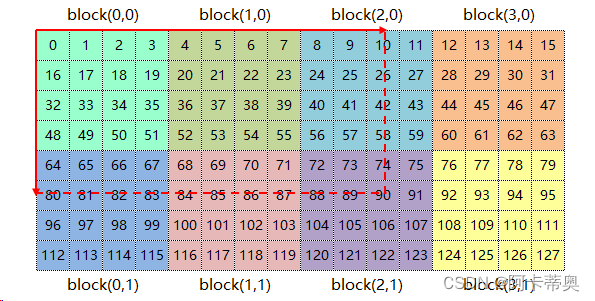
二维网络和二维线程块对二维矩阵进行索引,每个线程可负责一个矩阵元素的计算任务;
ix=threadIdx.x+blockIdx.xblockDim.x
iy=threadIdx.y+blockIdx.yblockDim.y
#include <stdio.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include "error.cuh"
#include <stdlib.h>
#include <iostream>
__global__ void addMatrix(int *input_1, int *input_2, int *output, const int nx, const int ny)
{
int ix = threadIdx.x + blockIdx.x * blockDim.x;
int iy = threadIdx.y + blockIdx.y * blockDim.y;
unsigned int idx = iy * nx + ix;
if (ix < nx && iy < ny)
{
output[idx] = input_1[idx] + input_2[idx];
}
}
int main(void)
{
int nx = 16;
int ny = 8;
int nxy = nx * ny;
size_t stBytesCount = nxy * sizeof(int);
int *ipHost_A, *ipHost_B, *ipHost_C;
ipHost_A = (int *)malloc(stBytesCount);
ipHost_B = (int *)malloc(stBytesCount);
ipHost_C = (int *)malloc(stBytesCount);
if (ipHost_A != NULL && ipHost_B != NULL && ipHost_C != NULL)
{
for (int i = 0; i < nxy; i++)
{
ipHost_A[i] = i;
ipHost_B[i] = i + 1;
}
memset(ipHost_C, 0, stBytesCount);
}
else
{
printf("Fail to allocate host memory! \n");
}
// 分配内存 初始化
int *ipDevice_A, *ipDevice_B, *ipDevice_C;
CHECK(cudaMalloc((int**)&ipDevice_A, stBytesCount));
CHECK(cudaMalloc((int**)&ipDevice_B, stBytesCount));
CHECK(cudaMalloc((int**)&ipDevice_C, stBytesCount));
if (ipDevice_A != NULL && ipDevice_B != NULL && ipDevice_C != NULL)
{
CHECK(cudaMemcpy(ipDevice_A, ipHost_A, stBytesCount, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(ipDevice_B, ipHost_B, stBytesCount, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(ipDevice_C, ipHost_C, stBytesCount, cudaMemcpyHostToDevice));
}
else
{
printf("Fail to allocate memory \n");
free(ipHost_A);
free(ipHost_B);
free(ipHost_C);
exit(1);
}
//
dim3 block(4,4);//线程块大小 4*4
dim3 grid((nx + block.x-1)/block.x, (ny+block.y - 1)/block.y);
printf("Thread config:grid:<%d,%d>, block<%d,%d>\n", grid.x, grid.y, block.x, block.y);
// 调用核函数
addMatrix <<< grid, block>>> (ipDevice_A, ipDevice_B, ipDevice_C, nx, ny);
//拷贝出结果
CHECK(cudaMemcpy(ipHost_C, ipDevice_C, stBytesCount,cudaMemcpyDeviceToHost));
for (int i = 0; i < 10; i++)
{
printf("id:%d, martix_A: %d, martix_B: %d \n", i+1, ipHost_A[i], ipHost_B[i], ipHost_C[i]);
}
if (ipHost_C != NULL)
{
for (int i = 0; i < nxy; i++)
{
printf("C[%d]: %d ", i, ipHost_C[i]);
if ((i+1)%16 == 0)
{
printf("\n");
}
}
}
//释放主机内存
free(ipHost_A);
free(ipHost_B);
free(ipHost_C);
CHECK(cudaFree(ipDevice_A));
CHECK(cudaFree(ipDevice_B));
CHECK(cudaFree(ipDevice_C));
CHECK(cudaDeviceReset());//清空申请的当前关联gpu设备资源
return 0;
}


















 673
673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









