







1、图像数字化一般采用均匀采样和均匀量化方式。
均匀采样,即等间隔采样。当对采样点数目有所限制时,比如说N×N个采样点,此时可以根据图像的特性采用自适应采样方案,有可能获得更好的效果。
自适应采样方案的基本思想是:在图像函数值变化较大的区域采用精细的采样,在相对平滑的区域采用粗糙的采样。这种自适应采样方案又称为非均匀采样。
一般来说,采样间隔越大,所得图像像素数越少,空间分辨率低,质量差,严重时出现像素呈块状的国际棋盘效应;采样间隔越小,所得图像像素数越多,空间分辨率高,图像质量好,但数据量大。
2、对比度:是指一幅图象中灰度反差的大小。
对比度=最大亮度/最小亮度
3、清晰度:由图像边缘灰度变化的速度来描述。
4、分辨率:单位dpi (display pixels / inch)每英寸显示的线数,dpi的数值越大,图像越清晰。
5、数字图像分类:
(1)二进制图像
在一幅二进制图像中,每一个像素将取两个离散数值(0或1)中的一个。二进制图像使用uint8或双精度类型的数组来存储。
(2)索引图像
索引图像是一种把像素直接作为RGB调色板下标的图像。在MATLAB中,索引图像包含一个数据矩阵X和一个颜色映射(调色板)矩阵map。数据矩阵可以是unit8、unit16或双精度类型的。颜色映射矩阵map是一个m3的数据阵列,其中每个元素的值均为[0,1]之间的双精度浮点型数据,map矩阵中的每一行分别表示红色、绿色和蓝色的颜色值。索引图像可把像素的值直接映射为调色板数值,每个像素的颜色通过使用X的像素值作为map的下标来获得,如值1指向map的第一行,值2指向第二行,以此类推。
(3)灰度图像
灰度图像通常由一个unit8、unit16或双精度类型的数组来描述,其实质是一个数据矩阵I,如式(2.6.1)。该矩阵中的数据均代表了在一定范围内的灰度级,每一个元素对应于图像的一个像素点,通常0代表黑色,1、255或65535(针对不同的存储类型)代表白色。
(4)多帧图像
多帧图像是一种包含多幅图像或帧的图像文件,又称为多页图像或图像序列,主要用于需要对时间或场景上相关图像集合进行操作的场合。例如,磁谐振图像切片或电影帧等。在MATLAB中,它是一个四维数组,其中第四维用来指定帧的序号。
5)RGB图像
RGB图像又称为真彩图像,它是利用R、G、B三个分量表示一个像素的颜色,R、G、B分别代表红、绿、蓝三种不同的基本颜色,通过三基色可以合成出任意颜色。所以对一个尺寸为MN的真彩图像来说,在MATLAB中则存储为一个M*N *3的多维数据矩阵。RGB图像不使用调色板,每一个像素的颜色直接由存储在相应位置的红、绿、蓝颜色分量的组合来确定。每个像素的三个颜色分量都存储在矩阵的第三维中,如坐标(16, 36)处的红、绿、蓝颜色值分别保存在元素(16, 36, 2)、(16, 36, 4)和(16, 36, 6)中。
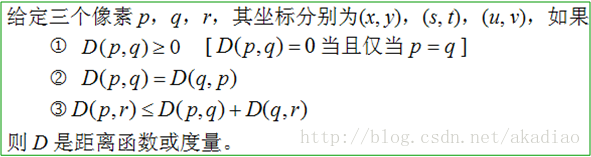
6、像素间的基本关系
1、N4(p)——象素(x, y)的4邻域:(x+1, y), (x-1, y),(x, y+1),(x, y-1)
2、ND(p)——象素(x, y)的对角邻域 (x+1, y+1), (x+1, y-1),(x-1, y+1),(x-1, y-1)
3、N8(p)——象素(x, y)的8邻域: N4(p) + ND(p)

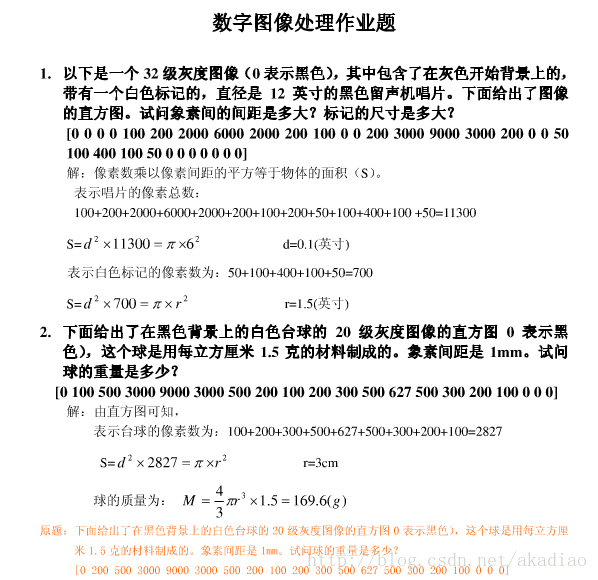
7、灰度直方图的应用
①用于判断图像量化是否恰当
②用于确定图像二值化的阈值
③当物体部分的灰度值比其他部分灰度值大时,可利用 直方图统计图像中物体的面积
④计算图像信息量H(熵)
8、纹理的分析方法:
(1)统计方法
(2)结构方法
(3)频谱分析方法
(1)纹理分析的统计方法:
从图像有关属性的统计分析出发
用于木纹、纱地、草地等不规则物体
自然纹理,具有重复性排列现象的自然景象,无规则
(2)纹理分析的结构方法:
着力找出纹理基元,然后从结构组成上探索纹理的规律
通过纹理的元素及其排列规则来描述纹理的结构。
人工纹理:是由自然背景上的符号排列组成、有规则的
(3)纹理分析的频谱分析方法:
采用基于传统的Fourier频谱分析方法以确定纹理基元及其排列规律 。
手段:
峰值处的面积、峰值处的相位、峰值与原点的距离平方、两个峰值间的相角差等。
自相关函数分析法
自相关函数ρ(x,y)随x,y大小而变化,其变化与图像中纹理粗细的变化有着对应的关系,因而可描述图像纹理特征。
数学形态学的基本运算:膨胀(扩张)、 腐蚀(侵蚀) 、开启、闭合。
二值图象用集合A表示。
作为结构元素的二值模板用集合B表示,B具有原点。
通常情况下,在膨胀之后,集合A包含于膨胀结果AB;
通常情况下,在腐蚀之后,腐蚀结果AΘB包含于集合A。
用B膨胀A的过程是:
先对B做关于原点的映象,再将其映象平移。
A与B映象的交集不为空集,则原点处元素属于输出集合。
用B腐蚀的结果:
若B平移x后仍包含于A中,则原点位置的元素属于输出集合。
当原点不包含于结构元素中时,有可能出现的情况是:
A在膨胀之后,反而不属于膨胀结果。
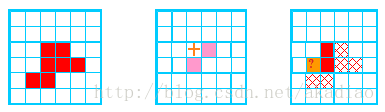
对于原点不包含于结构元素中的腐蚀运算,有可能出现两种情况:
A在腐蚀之后,得到与图1相同的情形。
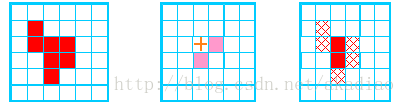
或者,腐蚀之后的结果反而不属于A,有新元素产生,如图2。
膨胀和腐蚀这两种运算是紧密联系的
一个运算对图象目标的操作,相当于另一个运算对图象背景的操作。
由于膨胀和腐蚀并不互为逆运算,因此通过级连可形成开启和闭合运算。
使用同一个结构元素先对图象进行腐蚀然后膨胀其结果,称为开启
使用同一个结构元素先对图象进行膨胀然后腐蚀其结果,称为闭合
将开启和闭合结合起来可构成形态学噪声滤除器。
设有一个集合A,先用一个结构元素B腐蚀A,再求取腐蚀结果和A的差集就可得到边界。
图像的几何变换:
几何运算可改变图象中各物体之间的空间关系。
这种运算可以被看成是将(各)物体在图象内移动。
其效果正如在一块橡皮板上画图,拉伸该橡皮板,并在不同的点固定该橡皮板。
几何运算住往需作一些限制以保持图象的外观顺序。
一个几何运算需要两个独立的算法。
一个算法来定义空间变换本身,用它描述每个象素如何从其初始位置“移动”到终止位置,即每个象素的“运动”。
一个用于灰度插值的算法,这是因为,在一般情况下,输入图象的位置坐标(x,y)为整数,而输出图象的位置坐标为非整数,反过来也是如此。
如果一个输入象素被映射到四个输出象素之间的位置,则其灰度值就按插值算法在四个输出象素之间进行分配。我们称之为象素移交(pixel carry-over)或称为向前映射法。
另一种更有效地达到目的的方法是象素填充(pixel filling)或称为向后映射算法。
在这里输出象素一次一个地映射回到输入图象中,以便确定其灰度级。
如果一个输出象素被映射到四个输出象素之间,则其灰度值由灰度级插值决定。向后空间变换是向前变换的逆。
输出象素通常被映射到输入图象中的非整数位置,即位于四个输入象素之间。
因此,为了决定与该位置相对应的灰度值,必须进行插值运算。
可采用的插值方法有多种:最近邻插值、双线性插值、Sink插值、多项式插值、B样条函数近似插值等。
最常用的是最近邻插值和双线性插值。
最简单的插值方法是所谓的零阶插值或称为最近邻插值,即令输出象素的灰度值等于离它所映射到的位置最近的输入象素的灰度值。
最近邻插值计算十分简单,在许多情况下,其结果也可令人接受。
然而,当图象中包含象素之间灰度级有较大变化的细微结构时,最近邻插值法会在图象中产生人工的痕迹。
一阶插值(或称双线性插值法)和零阶插值法相比可产生更令人满意的效果。只是程序稍微复杂一些,运行时间稍长一些。
由于通过四点确定一个平面是一个过约束问题,所以在一个矩形栅格上进行的一阶插值就需要用到双线性函数。
令f(x,y)为两个变量的函数,其在单位正方形顶点的值已知。假设希望通过插值得到正方形内任意点的f(x,y)值。
可令由双线性方程:
f(x,y)=ax+by+cxy+d
来定义的一个双曲抛物面与四个已知点拟合。从a到d这四个系数须由已知的四个顶点的f(x,y)值来确定。
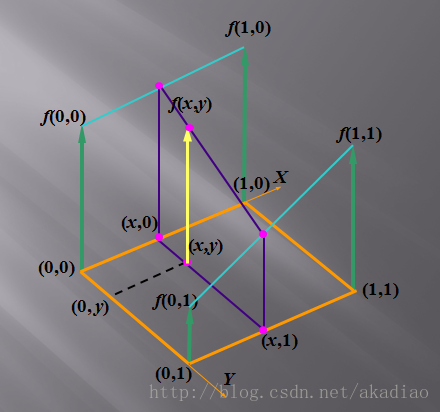
有一个简单的算法可产生一个双线性插值函数,并使之与四个顶点的f(x,y)值拟合。
首先,对上端的两个顶点进行线性插值可得:
f(x,0)=f(0,0)+x[f(1,0)-f(0,0)]
类似地,对于底端两个顶点进行线性插值有:
f(x,1)=f(0,1)+x[f(1,1)-f(0,1)]
最后,做垂直方向的线性插值,以确定:
f(x,y)=f(x,0)+y[f(x,1)-f(x,0)]
将等式10.3和式10.4代入式10.5,展开等式并合并同类项可得:
f(x,y)=[f(1,0)-f(0,0)]x+[f(0,1)-f(0,0)]y+[f(1,1)+f(0,0)-f(0,1)-f(1,0)]xy+f(0,0)
在几何运算中,双线性灰度插值的平滑作用可能会使图象的细节产生退化,尤其是在进行放大处理时,这种影响将更为明显。
在其他应用中,双线性插值的斜率不连续性会产生不希望的结果。
这两种情况都可以通过高阶插值得到修正,当然这需要增加计算量。
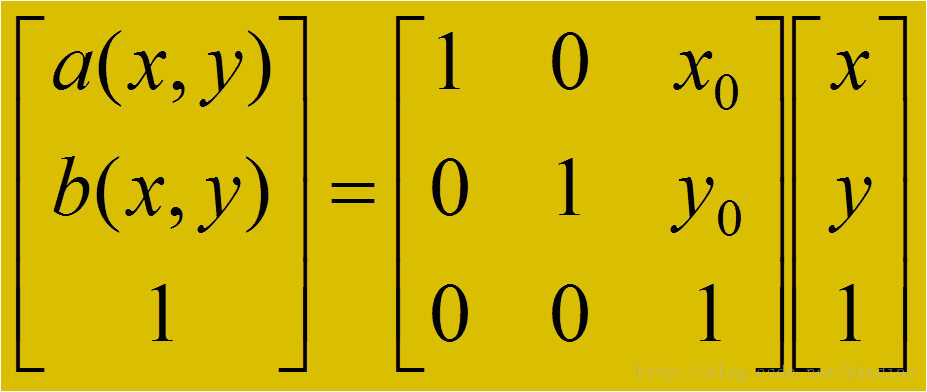
图像平移:
采用称为齐次坐标的表达方式,可认为xy平面是x、y、z三维空间中z=0的平面,并写成简洁的矩阵形式如下:
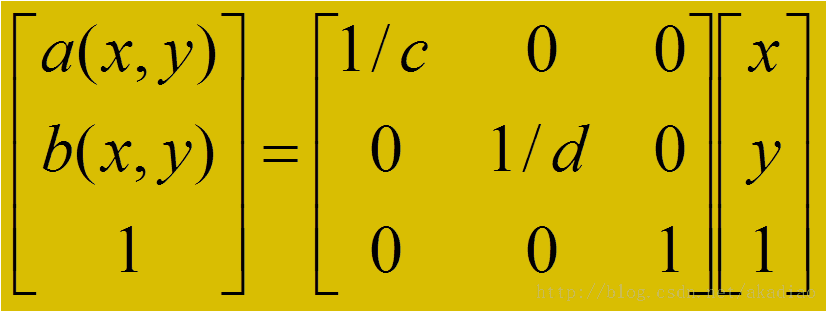
图像缩放:
使输出图象(x,y坐标系)在x轴方向缩放c倍,在y轴方向缩放d倍。图象原点(通常取在左上角)在图象“膨胀”时保持不动。在齐次坐标系中:
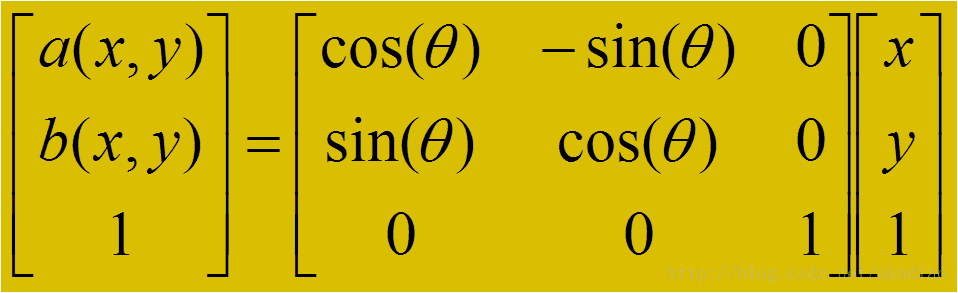
图像旋转:
一个绕原点的顺时针θ角旋转。在齐次坐标系中可写为:
几何变换的应用:
1、几何校正
几何运算的一个重要应用是消除由于摄像机导致的数字图象的几何畸变。当需要从数字图象中得到定量的空间测量数据时,几何校正被证明是十分重要的。
2、图象校直
一些图象系统使用非矩形的象素坐标。在用普通的显示设备观察这些图象时,必须先对它们进行校直,也就是说,将其转换为矩形象素坐标。
3、图象配准
几何运算的另一个应用是对相似的图象进行配准以便进行图象比较。典型的应用是利用图象相减来检测运动或变化。如不进行配准,就不能检测到真正的变化。
4、图象样式转换
有时需将图象以另一种样式表示以便于解释,这时也会用到几何运算。
5、地图投影
几何运算的另一个主要应用是地图绘制中的图象投影。
6、变形
在电影和电视工业中,越来越普及的特技是基于几何运算的。变形就是一种可以使一个物体逐渐转变为另外一个物体的技术。
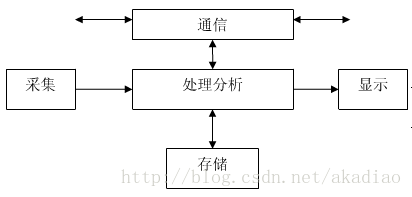
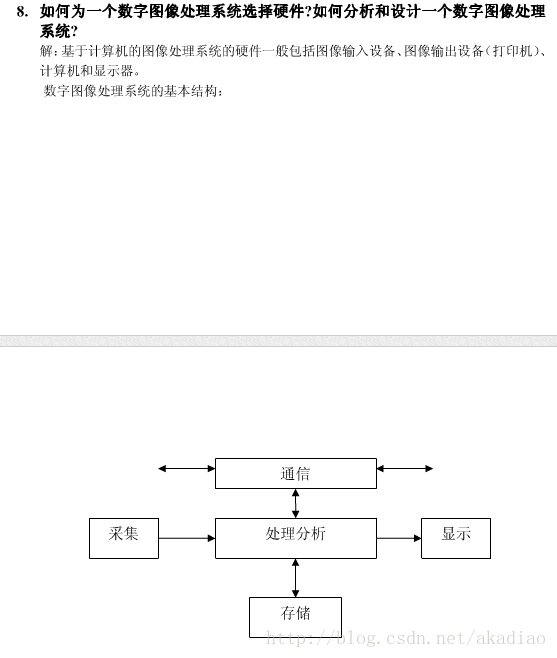
数字图像处理系统的基本结构:
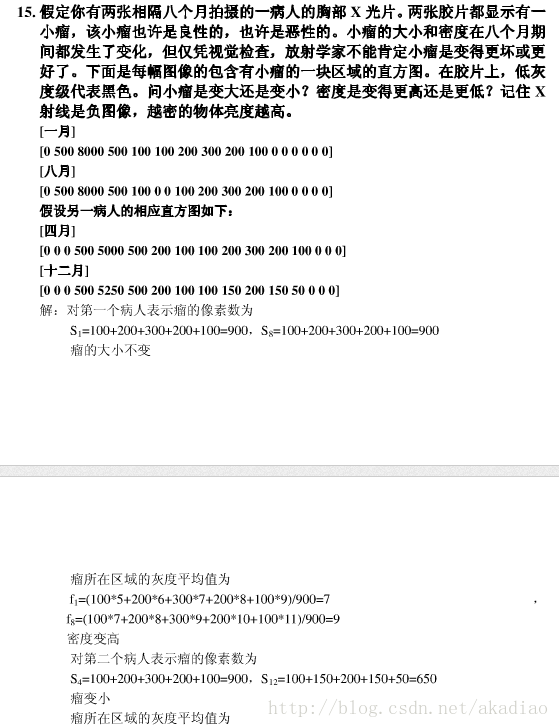
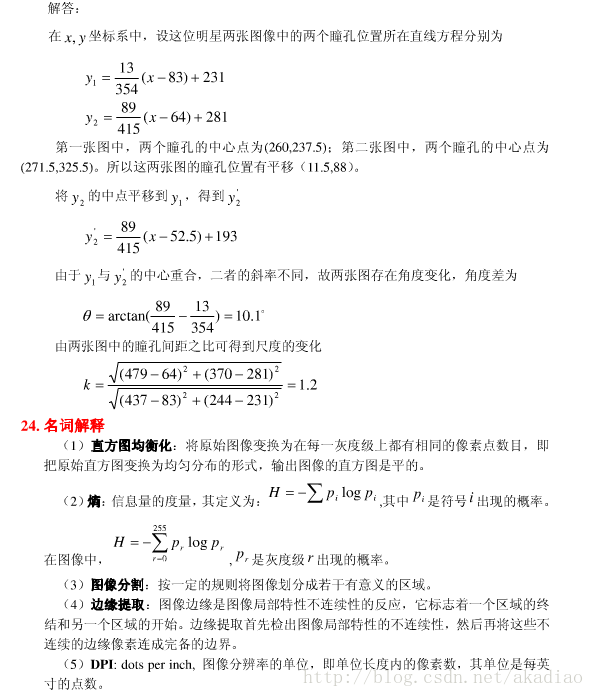
练习题:















 2256
2256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









