







简介:Slam问题的核心是将一个移动机器人放置在一个未知环境中,机器人通过自身传感器逐步建立环境的地图同时使用这张地图计算自身的位置。Slam问题由R. Smith, M. Self, and P.Cheeseman在1990年的一篇论文中提出。这个问题被认为是机器人领域的“圣杯”。因为它将使得机器人可以在毫无先验知识的环境中进行动作。
Slam问题由明显的结构,它有两个问题组成,一个是定位问题(localization),另一个是构建地图问题(Mapping)。
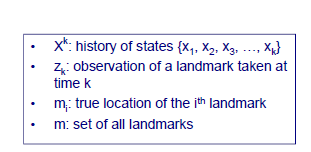
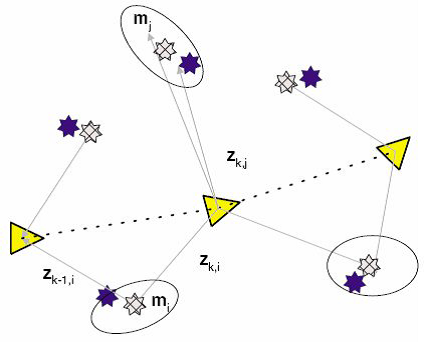
Localization problem:已知一张地图中有若干路标landmark,对这些路标进行测量,获得了他们的测量位置zk,然后通过zk再决定机器人的位置xk。在获取路标位置的过程中如有噪声,需要滤波。
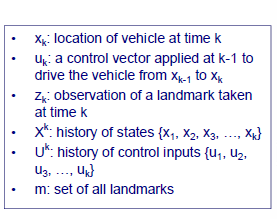
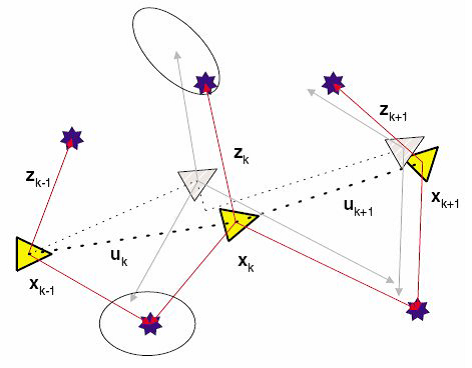
Mapping problem:机器人的位置Xk已经知道,对路标点进行测量,获得测量位置zk,给予zk创建map m。
Slam 问题的基础:
过程模型(process model):一个已知动力学模型的机器人通过拥有若干路标
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









