






点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
转载自丨极市平台 作者丨happy
导读
针对SwinV1在更大模型方面存在的几点问题,Swin transformer V2提出了后规范化技术、对数空间连续位置偏置技术、大幅降低GPU占用的实现等得到了具有超高性能的SwinV2,刷新了多个基准数据集的指标。
Swin Transformer V2: Scaling Up Capacity and Resolution
论文链接:https://arxiv.org/abs/2111.09883
代码链接:https://github.com/microsoft/Swin-Transformer
SwinTransformer重磅升级 !MSRA提出SwinV2,朝着更大容量、更高分辨率的更大模型出发,在多个基准数据集(包含ImageNet分类、COCO检测、ADE20K语义分割以及Kinetics-400动作分类)上取得新记录。针对SwinV1在更大模型方面存在的几点问题,提出了后规范化技术、对数空间连续位置偏置技术、大幅降低GPU占用的实现等得到了具有超高性能的SwinV2,刷新了多个基准数据集的指标。
Abstract
本文提出一种升级版SwinTransformerV2,最高参数量可达3 Billion,可处理尺寸图像。通过提升模型容量与输入分辨率,SwinTransformer在四个代表性基准数据集上取得了新记录:84.%@ImageNetV2、63.1 box 与54.4 max mAP@COCO、59.9mIoU@ADE20K以及86.8%@Kinetics-400(视频动作分类)。
所提技术可以广泛用于视觉模型缩放,Transformer的缩放技术再NLP语言建模中已得到广泛探索,但在视觉任务中尚未进行。主要是因为以下几点训练与应用难题:
视觉模型通常面临尺度不稳定 问题;
下游任务需要高分辨率图像,尚不明确如何将低分辨率预训练模型迁移为高分辨率版本 ;
此外,当图像分辨率非常大时,GPU显存占用 也是个问题。
为解决上述问题,我们以SwinTransformer作为基线,提出了几种改进技术:
提出后规范化(Post Normalization)技术 与可缩放(Scaled)cosine注意力提升大视觉模型的稳定性;
提出log空间连续位置偏置 技术进行低分辨率预训练模型向高分辨率模型迁移。
此外,我们还共享了至关重要的实现细节 ,它可以大幅节省GPU显存占用以使得大视觉模型训练变得可行。
基于上述技术与自监督预训练,我们成功训练了一个包含3B参数量的SwinTransformer模型并将其迁移到不同的高分辨率输入的下游任务上,取得了SOTA性能。
Method
A Brief Review of Swin Transformer
Swin Transformer是一种通用的视觉骨干模型,在不同的视觉任务(包含图像分类、目标检测以及语义分割)上均取得了极强性能。Swin Transformer的主要思想:为常规Transformer Encoder架构引入了几个重要的视觉信号先验信息 ,包含分层、局部以及平移不变形。基础Transformer单元提供了强建模能力,视觉信号先验信息使其对不同视觉任务极为友好。
Normalization Configuration 众所周知,规范化技术对于更深架构的训练非常重要。原始的SwinTransformer采用了常规的预规范化技术,见下图。
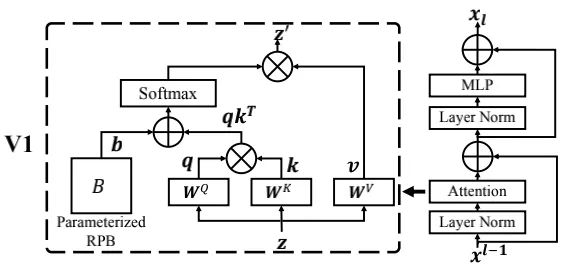
Relative position bias 它是原始SwinTransformer的一个关键成分,它引入了一个额外参数化偏置,公式如下:
其中,是每个head的相对位置偏置,它对于稠密识别任务非常重要。当进行不同分辨率模型迁移时,常规方案是对该偏置进行双三次插值近似。
Issues in scaling up model capacity and window resolution 在对SwinTransformer进行容量与窗口分辨率缩放过程中,我们发现以下两个问题:
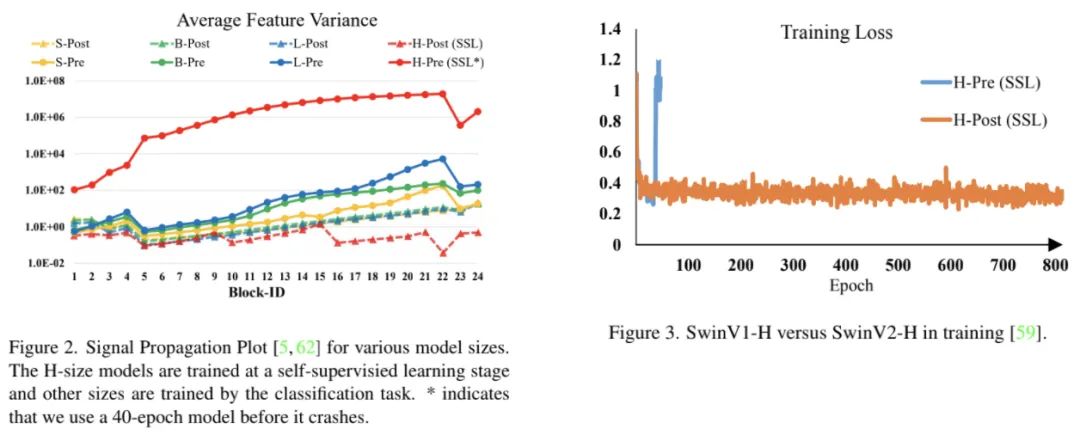
容量缩放过程中的不稳定问题,见下图。
跨分辨率迁移时的性能退化问题,见下表。
Scaling up Model Capacity
正如上面所提到:原始SwinTransformer采用了预规范化技术。可以看到:当对模型容量进行缩放时,深层的激活值会极大提升 。

事实上,在预规范化配置下,每个残差模块的输出激活值与主分支直接合并,导致主分支在更深层的幅值越来越大,进而导致训练不稳定。
Post Normalization 为缓解该问题,我们提出了Post Normalization(后规范化):每个残差模块的输出先进行规范化再与主分支进行合并,因此主分支的幅值不会逐层累积。从上面的Figure2可以看到:使用后规范化的模型激活幅值更温和。
在最大的模型中,我们每6个Transformer模块额外引入一个LN单元以进一步稳定训练。
Scaled Cosine Attention 在原始自注意力计算过程中,像素对的像素性通过query与key的点积计算。我们发现:在大模型中,某些模块与head的注意力图会被少量像素对主导 。为缓解该问题,我们提出了Scaled Cosine Attention(SCA),公式如下:
Scaling Up Window Resolution
接下来,我们引入一种log空间连续位置偏置方法以使得相对位置偏置跨窗口分辨率平滑迁移。
Continuous Relative Position Bias 不同于直接对偏置参数直接优化,连续位置偏置方法采用了针对相对坐标的元网络:
注:是一个很小的网络,比如2层MLP。它对任意相对坐标生成偏置参数,因而可以自然地进行任意可变窗口尺寸的迁移。在推理阶段,每个相对位置的偏置可以预先计算并保存,按照原始方式进行推理。
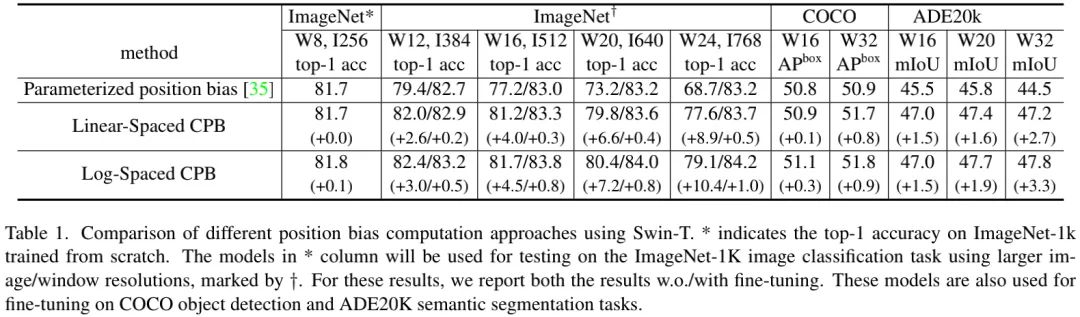
Log-space Coordinates 当跨大窗口迁移时,有较大比例的相对坐标范围需要外插。为缓解该问题,我们采用了对数空间坐标:
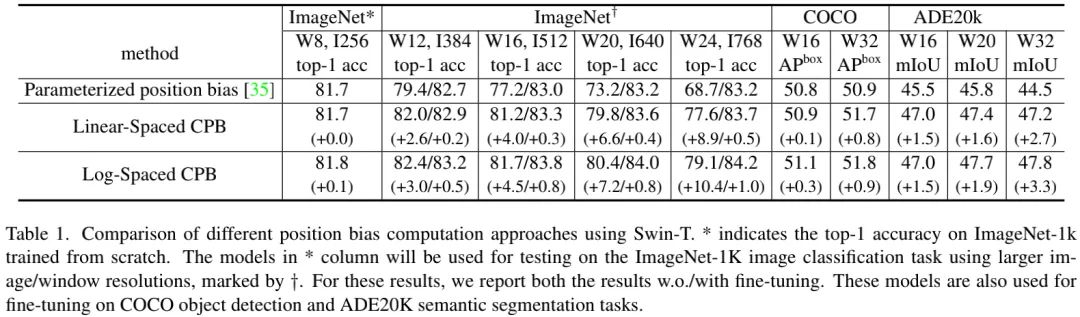
通过对数空间坐标,在进行块分辨率迁移时,所需的外插比例会更小。比如,将预训练模型向迁移时,输入坐标范围从调整为,外插比例为。而采用对数空间坐标,输入坐标范围从,,调整为,,,外插比例为。下表则给出了不同位置偏置下的迁移性能对比,可以看到:当向更大窗口尺寸迁移时,对数空间连续位置偏置性能最佳 。
Other Implementation
Implementation to save GPU memory 大分辨率输入与大容量模型存在的另一个问题是GPU显存占用不可接受问题 。我们采用了以下实现改善该问题:
Zero-Redundancy Optimizer(ZeRO): 采用ZeRO优化器减少GPU显存占用,对整体训练速度影响极小;
Activation check-pointing:采用checkpoint技术节省GPU占用,但会降低30%训练速度;
Sequential Self-attention computation:采用串式计算,而非batch模式,对整体训练速度影响极小。
通过上述实现,我们可以在Nvidia A100-40G GPU训练参数量3B的模型(COCO检测与ImageNet分类,输入为)。
Joining with a self-supervised approach
更大的模型需要更多地数据(data hungry)。为解决该问题,之前的大模型训练通过采用额外的数据或者自监督预训练。我们对这两种策略进行了组合
额外数据:我们对ImageNet-22K进行扩大五倍达到了70M数量;
自监督学习:我们采用了自监督训练以更好的进行数据挖掘。
通过上述训练方案,我们训练了一个具有3B参数量的SwinTransformer模型并在多个基准数据集上取得了SOTA性能。
Model Configurations
我们保持与SwinTransformer相同的stage、block以及通道配置得到了四个版本的SwinTransformerV2:
SwinV2-T: C96, layer number= {2,2,6,2}
SwinV2-S: C96, layer number= {2,2,18,2}
SwinV2-B: C128, layer number= {2,2,18,2}
SwinV2-L: C192, layer number= {2,2,18,2}
我们进一步对SwinV2进行更大尺寸缩放得到了658M与3B参数模型:
SwinV2-H: C=352, layer number={2,2,18,2}
SwinV2-G: C=512, layer number={2,2,42,2}
Experiments
本文主要在ImageNetV1、ImageNetV2、COCO检测、ADE20K语义分割以及Kinetics-400视频动作分类方面进行了实验。
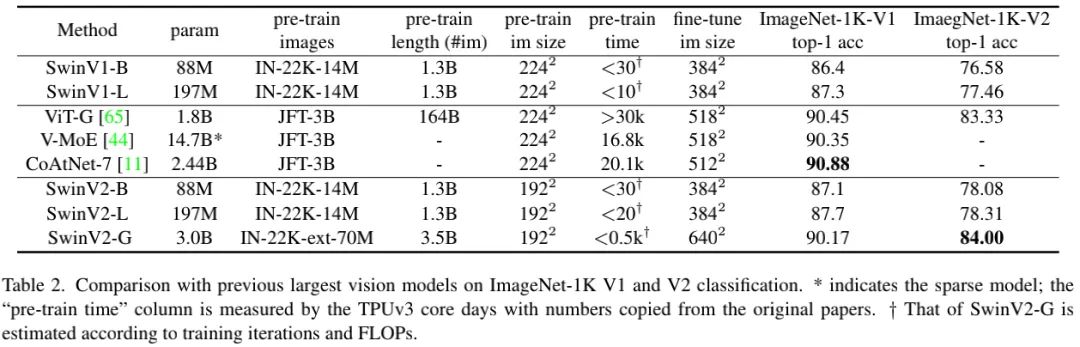
上表给出了ImageNet分类任务上的性能对比,可以看到:
在ImageNetV1数据上,SwinV2-G取得了90.17%的精度;
在ImageNetV2数据上,SwinV2-G取得了84.0%的精度,比之前最佳高0.7%;
相比SwinV1,SwinV2性能提升约0.4~0.8%。
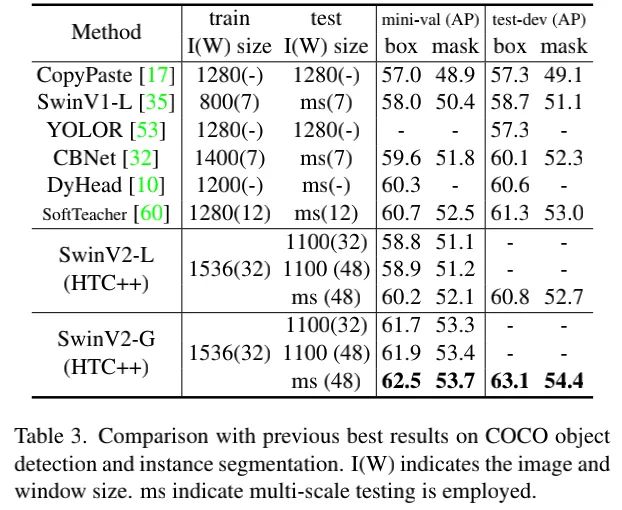
上表比较了COCO检测任务上的性能,可以看到:所提方案取得了63.1/54.4的box与mask mAP指标,比此前最佳高1.8/1.4 。
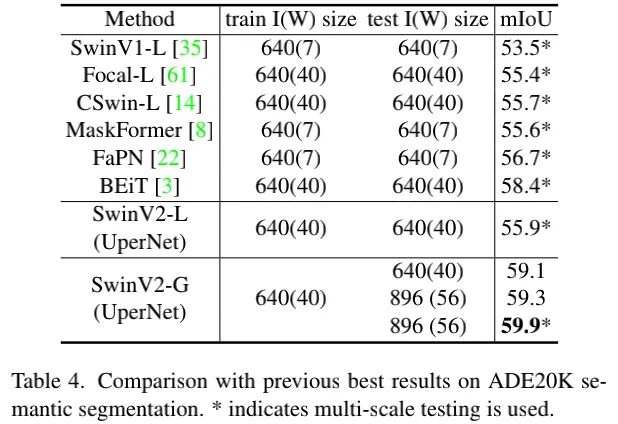
上表比较了ADE20K语义分割任务上的性能,可以看到:所提方案取得了59.9mIoU指标,比此前最佳高1.5 。
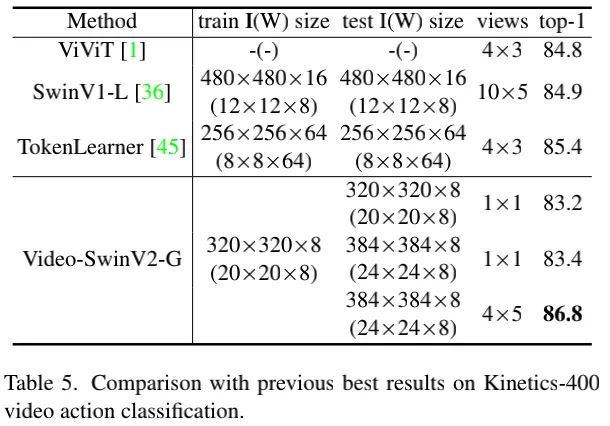
上表比较了Kinetics-400视频动作分类任务上的性能,可以看到:所提方案取得了86.8%的精度,比此前最佳高1.4% 。
上面Swin V2论文PDF下载
后台回复:SwinV2,即可下载上述论文PDF
后台回复:CVPR2021,即可下载CVPR 2021论文和代码开源的论文合集
后台回复:ICCV2021,即可下载ICCV 2021论文和代码开源的论文合集
后台回复:Transformer综述,即可下载最新的3篇Transformer综述PDF
重磅!Transformer交流群成立
扫码添加CVer助手,可申请加入CVer-Transformer 微信交流群,方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加小助手微信,进交流群
▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看![]()















 426
426











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









