







基本框架
语音识别系统主要有四部分组成:信号处理和特征提取、声学模型、语言模型(Language Model, LM)和解码器(Decoder)。
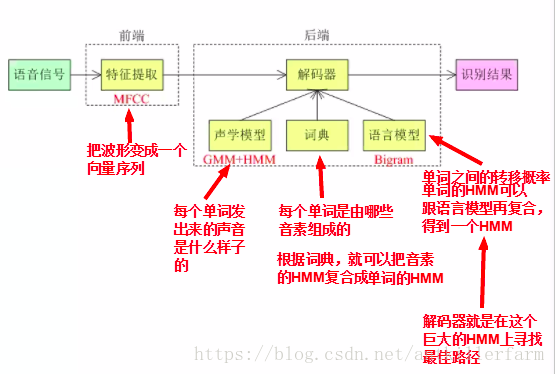
信号处理和特征提取部分以音频信号为输入,通过消除噪音、信道失真等对语音进行增强,将语音信号从时域转化到频域,并为后面的声学模型提取合适的特征。
声学模型将声学和发音学的知识进行整合,以特征提取模块提取的特征为输入,生成声学模型得分。
语言模型估计通过重训练语料学习词之间的相互概率,来估计假设词序列的可能性,也即语言模型得分。如果了解领域或者任务相关的先验知识,语言模型得分通常可以估计得更准确。
解码器对给定的特征向量序列和若干假设词序列计算声学模型得分和语言模型得分,将总体输出分数最高的词序列作为识别结果。
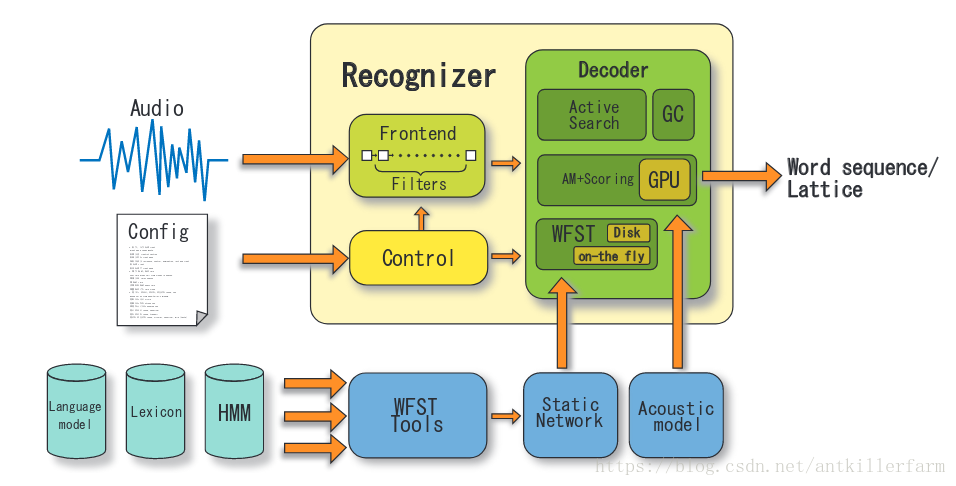
上图是一个实际的recognition engine的结构图。其原文地址:
https://eprints.lib.hokudai.ac.jp/dspace/bitstream/2115/39654/1/MP-SS1-4.pdf
王赟写的《语音识别技术的前世今生》,写的非常好,下载地址:
https://zhihu-live.zhimg.com/0af15bfda98f5885ffb509acd470b0fa
王赟,清华本科(2010)+CMU在读博士。
个人主页:
http://www.cs.cmu.edu/~yunwang/
下面是网友写的注解版本:
http://www.cnblogs.com/lyu0709/p/6929659.html
《语音识别的前世今生:GMM+HMM & 深度学习》讲座笔记
http://www.cnblogs.com/lyu0709/p/6929692.html
《语音识别的前世今生》Q&A
参考:
https://blog.csdn.net/by21010/article/details/51506292
语音识别系统结构——鸟瞰
http://www.cnblogs.com/welen/p/7489504.html
语音识别概述
https://www.zhihu.com/question/20398418
语音识别的技术原理是什么?
Microphone
麦克风作为业界通俗的一种叫法,是英文Microphone的音译名称,国内的称呼乱一些,有时候也简单称作话筒,香港和台湾地区也会称作微音器、拾音器。麦克风的中文学术名称是传声器,这是一种将声音转换成电子信号的换能器,即把声信号转成电信号,这其实和光电转换的原理是完全一致的。
消费级市场的麦克风基本都是标量麦克风,也就说只能采集单一的物理量信息——声压。声压是指声波通过媒质时,由振动所产生的压强改变量,也可以理解为声音的幅度或者强度。声压常用字母”p”表示,单位是帕斯卡(符号Pa)。声压的帕斯卡单位由于不方便记忆(比如 20×10−6 20 × 10 − 6 Pa~20Pa),一般就以对数尺衡量有效声压相对于一个基准值的大小来表示,即声压级,其单位是分贝(符号dB)。
人类对于1KHz的声音的听阈为 20×10−6 20 × 10 − 6 Pa,通常以此作为声压级的基准值。这样讲可能晦涩难懂,我们来简单的类比一下:人类的呼吸声压是 60×10−6 60 × 10 − 6 左右,声压级大约10dB,火箭发射的声压是4000Pa左右,声压级大约165dB,闪光弹的声压超过1万Pa,声压级大约175dB。
为了描述麦克风的性能,有几个性能指标是非常关键的,这包括了灵敏度、指向性、频率响应、阻抗、动态范围、信噪比、最大声压级(或AOP,声学过载点)、一致性等。
现在麦克风阵列主要使用的是数字MEMS麦克风,其最长尺寸仅有3.76MM。MEMS麦克风也是手机中大量使用的传感器件,一般手机至少有2个以上这类麦克风。MEMS麦克风实际上只是工艺上的改进,其原理依然属于电容式麦克风。
与MEMS麦克风直接PK的,就是驻极体麦克风。它的性能更优秀,但一致性不如MEMS麦克风,因此主要用在单麦上。而麦克风阵列一般都是MEMS麦克风。
被淘汰的技术:带式麦克风、碳精麦克风(老式电话)。
先进技术:压电麦克风、光纤麦克风、激光麦克风、矢量麦克风。
Microphone的主要厂商:
1.Knowles 美国
2.瑞声(AAC) 中国
3.歌尔(Goertek) 中国
4.BSE 韩国
5.ST 欧洲
参考:
https://zhuanlan.zhihu.com/p/27610503
盘点麦克风技术及市场,远场语音交互如何选型麦克风
Microphone Array
麦克风阵列(Microphone Array),从字面上,指的是麦克风的排列。也就是说由一定数目的声学传感器(一般是麦克风)组成,用来对声场的空间特性进行采样并处理的系统。
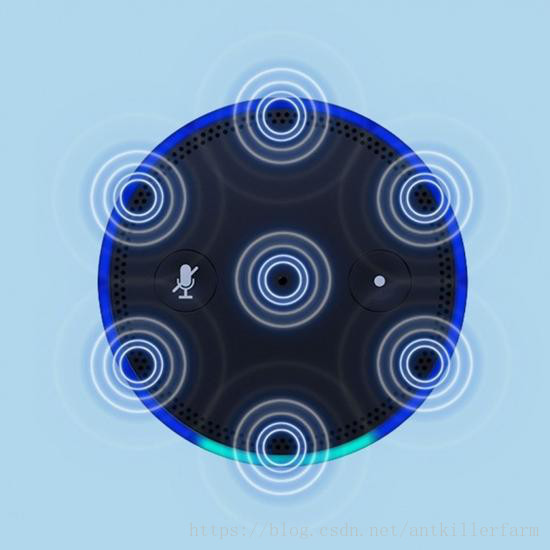
上图是Amazon Echo所采用的6+1麦克风阵列。
根据声波传导理论,利用多个麦克风收集到的信号可以将某一方向传来的声音增强或抑制。利用这种方法,麦克风阵列可以将噪声环境中特定声音信号有效的增强。由于麦克风阵列技术具有很好的抑制噪声和语音增强的能力,又不需要麦克风时刻指向声源方向,因此在语音处理领域具有非常好的前景,可以用在非常广的应用领域。
Microphone Array形状
麦克风阵列一般来说有线形、环形和球形之分,严谨的应该说成一字、十字、双L、平面、螺旋、球形等。
至于麦克风阵列的阵元数量,也就是麦克风数量,可以从2个到上千个不等。由于成本限制,消费级麦克风阵列的阵元数量一般不超过8个,所以市面上最常见的就是6麦和4麦的阵型。
智能音箱一般都是放置桌面,需要360度响应指令,所以环形阵列比较适合,而智能中控一般贴墙固定,仅照顾180度范围即可,这时候线形阵列就能满足。
双麦克风阵列:结构简单、成本低、容易实施、功耗低。
像空调、电视这类家电产品,它永远都是贴墙放,八个麦克风在实际应用上是多余的。而双麦克技术在任何产品上均可自然适配。
在机器人领域里,对声源定位的要求比较高,所以一般都会使用环形多麦克方案。这两年国内比较火的Rokid机器人就采用了8麦克的阵列。
参考:
https://www.leiphone.com/news/201610/5Ye8zxxwtlLGiW1y.html
技术解读:从亚马逊Echo到谷歌Home,双麦克风阵列更有优势?
Microphone Array vs 人耳
偶尔会听到行业人士做的一个类比,人类有两只耳朵,所以两个麦克风就能达到同样性能。这实际上是一个误解,以现在技术来看,即便用100个麦克风,也未必能达到人耳的效果。人耳是极其复杂的一个结构,至今为止实际上科学也没搞清楚所有原理,更谈不上用简单的麦克风进行模拟了。现在的麦克风,实际上都是标量麦克风,所获取的仅仅是声压变化转成的电信号,而且还没有耳廓,更无法根据场景变化随动调整。
Microphone Array与语音交互技术架构
前端主要解决了产品是否听得准的问题,这其中有五个核心指标:远场语音唤醒率、复杂环境 误唤醒率、远场语音识别率、总体延迟时间和总体稳定性。这五个核心指标决定了用户的第一体验。
1.以Google为代表的纯云端技术架构。麦克风阵列的阵元较多,产生的数据容量太大,而当前的网络上传带宽严重不足,所以只能权衡选择更少的麦克风。
2.以科胜讯为代表的纯前端技术架构。纯前端方案的优点就是容易集成到芯片上,缺点就是很难升级以及扩展,这恰好与人工智能不断迭代的趋势不太兼容,也是当前这种方案无法流行的主要原因。
这类方案能提供的功能有限,主要包括自适应回声抵消技术(AEC)、自动噪音抑制技术(ANS)和自动增益控制技术(AGC)。
3.以Amazon为代表的前端+云端方案。这种方案是把算法分别放置到前端和云端,根据具体场景可以调配优化,更容易优化性能并扩展功能。这种方案考虑了麦克风阵列与唤醒和识别技术一体化的问题,由于唤醒和识别严重依赖麦克风阵列的算法处理效果,实际上这三种技术是无法完全分割的,特别是麦克风阵列和唤醒技术更是浑然一体。
参考:
https://zhuanlan.zhihu.com/p/29809882
让机器听懂人类语言,主流麦克风阵列技术解读
https://zhuanlan.zhihu.com/p/23420891
麦克风阵列的语音信号处理技术
Microphone Array技术难点
传统的阵列信号处理技术直接应用到麦克风阵列处理系统中往往效果不理想,其原因在于麦克风阵列处理有不同的处理特点:
阵列模型的建立
麦克风主要应用处理语音信号,拾音范围有限,且多用于近场模型,使得常规的阵列处理方法如雷达,声呐等平面波远场模型不再适用,在近场模型中,需要更加精准的球面波,需要考虑传播路径不同引起的幅度衰减不同。
宽带信号处理
通常的阵列信号处理多为窄带,即不同阵元在接受时延与相位差主要体现在载波频率,而语音信号未经过调制也没有载波,且高低频之比较大,不同阵元的相位延时与声源本身的特性关系很大—频率密切相关,使得传统的阵列信号处理方法不再完全适用。
非平稳信号处理
传统阵列处理中,多为平稳信号,而麦克风阵列的处理信号多是非平稳信号,或者短时平稳信号,因此麦克风阵列一般对信号做短时频域处理,每个频域均对应一个相位差,将宽带信号在频域上分成多个子带,每个子带做窄带处理,再合并成宽带谱。
混响
声音传播受空间影响较大,由于空间反射,衍射,麦克风收到的信号除了直达信号以外,还有多径信号叠加,使得信号被干扰,即为混响。在室内环境中,受房间边界或者障碍物衍射,反射导致声音延续,极大程度的影响语音的可懂度。
声源定位
近场模型和远场模型
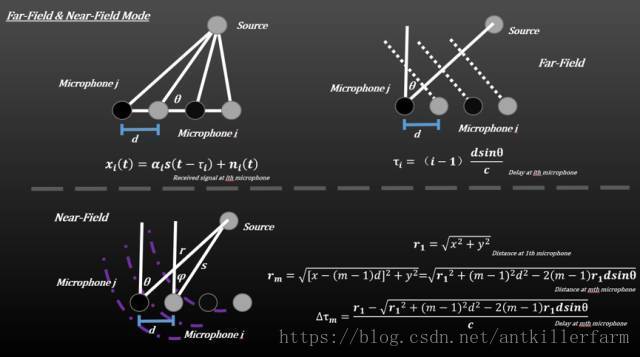
通常麦克风阵列的距离为1~3m,阵列处于近场模型,麦克风阵列接受的是球面波而不是平面波,声波在传播的过程中会发生衰减,而衰减因子与传播的距离成正比,因此声波从声源到达阵元时候的幅度也各不相同。而远场模型中,声源到阵元的距离差相对较小,可以忽略。通常,我们定义
参考:
https://www.zhihu.com/question/48537863
远场(far-field)语音识别的主流技术有哪些?
https://mp.weixin.qq.com/s/1GjBWW5gn2WQb1GWExtB5A
HOA声场重建原理














 1134
1134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









