










说明:本次内容属于全新技术栈,设计了一种使用字体库结合机器人轨迹规划以及机器人运动学实现生成式轨迹操作方式,可以在常规写字以及焊接等领域应用
一,背景说明
本次开发的背景是在工业焊接领域下进行系统设计,主要解决对焊接产品编号及产品后续归纳管理,机器人可以直接在焊接完成后对产品进行写字和编号,省去再打印和其他方式编号的成本
二,技术栈说明
本次机器人写字仿真系统是基于文字矢量库和Opencascade和QT在C++平台下进行开发,文字轨迹生成算法和机器人运动学算法属于自己个人开发,系统开发的测试环境是在matlab下进行
三,开发过程
1.文字轮廓及控制点提取和轨迹生成
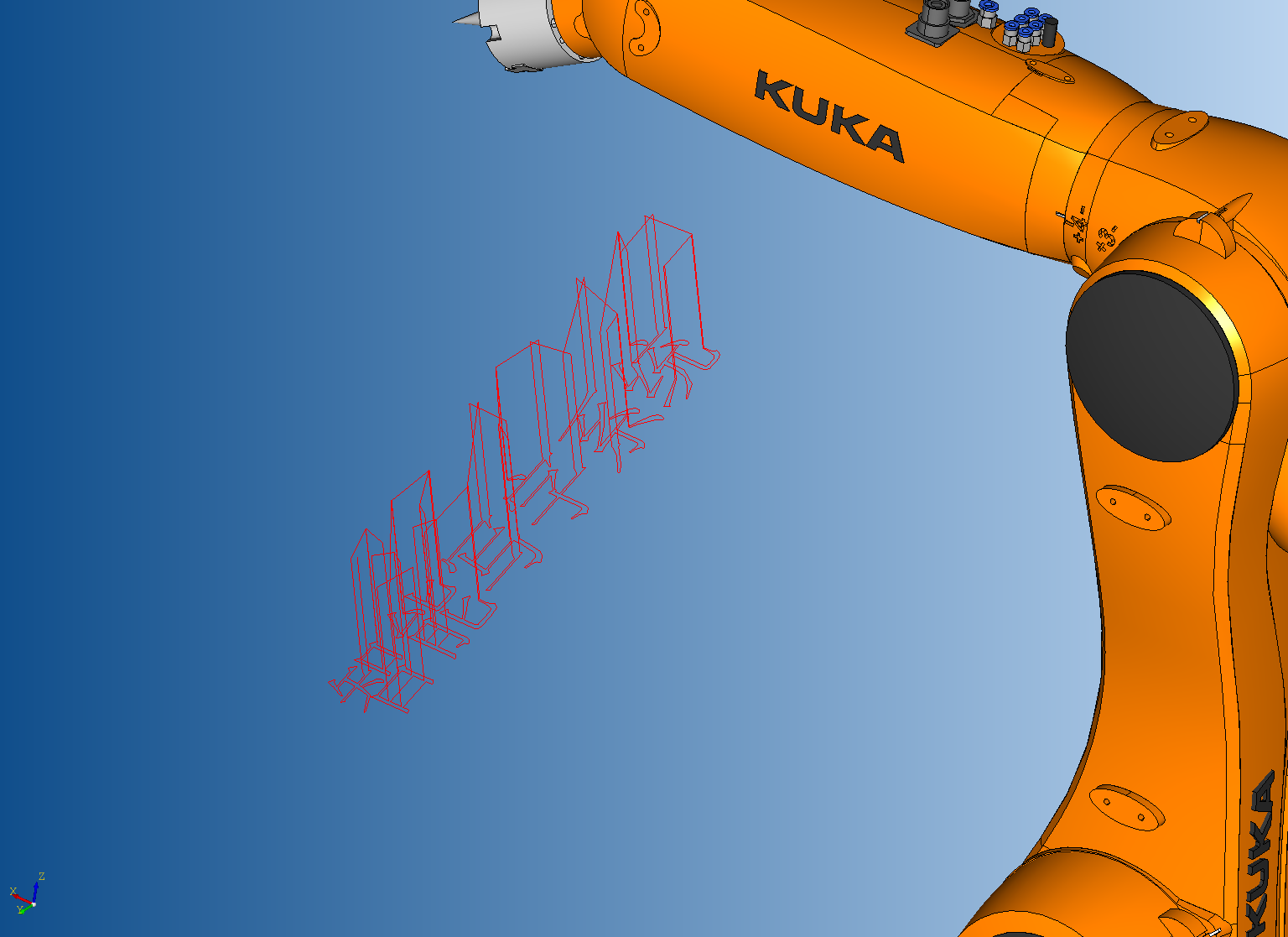
实现效果:
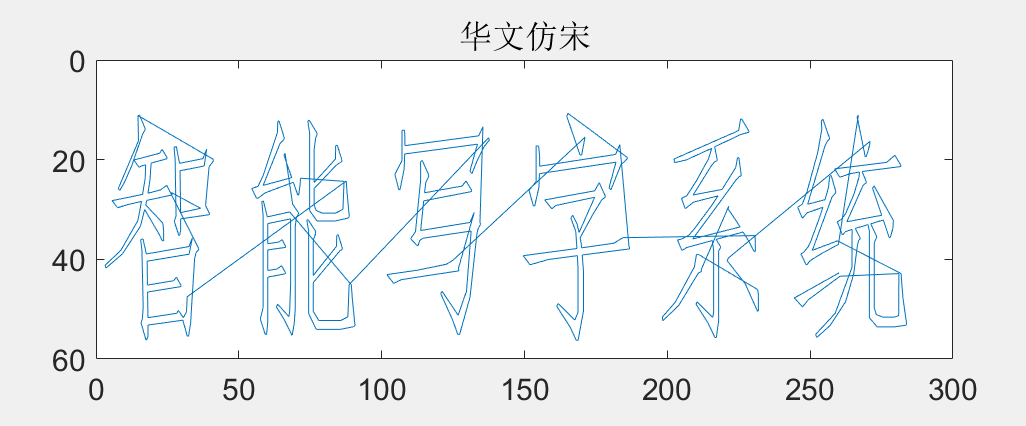
控制点提取

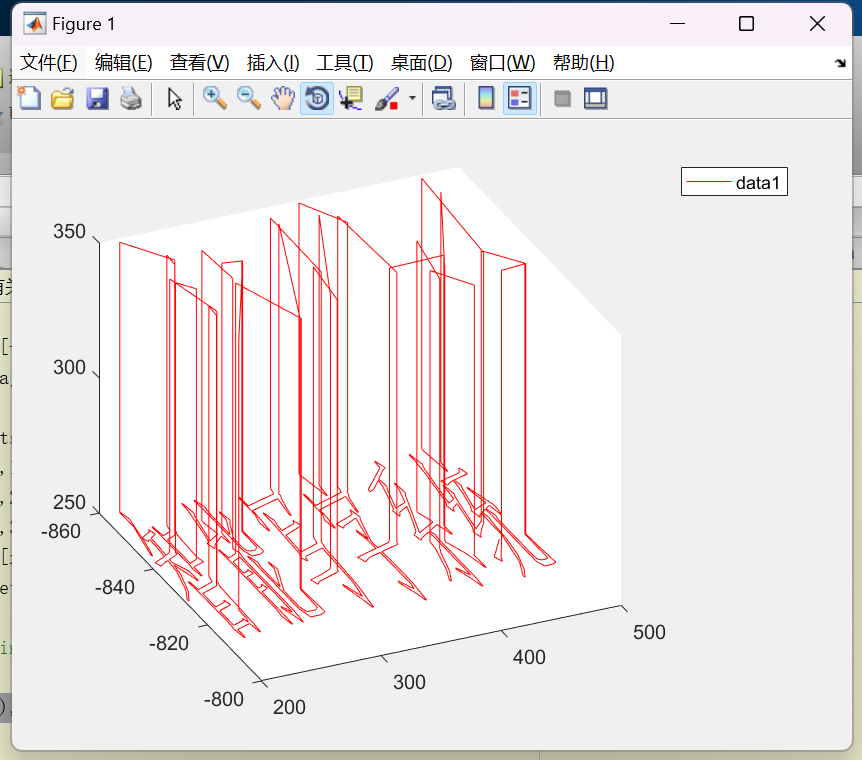
控制点轨迹(抬枪落枪)自适应生成算法(红色垂直线是抬枪落枪轨迹)
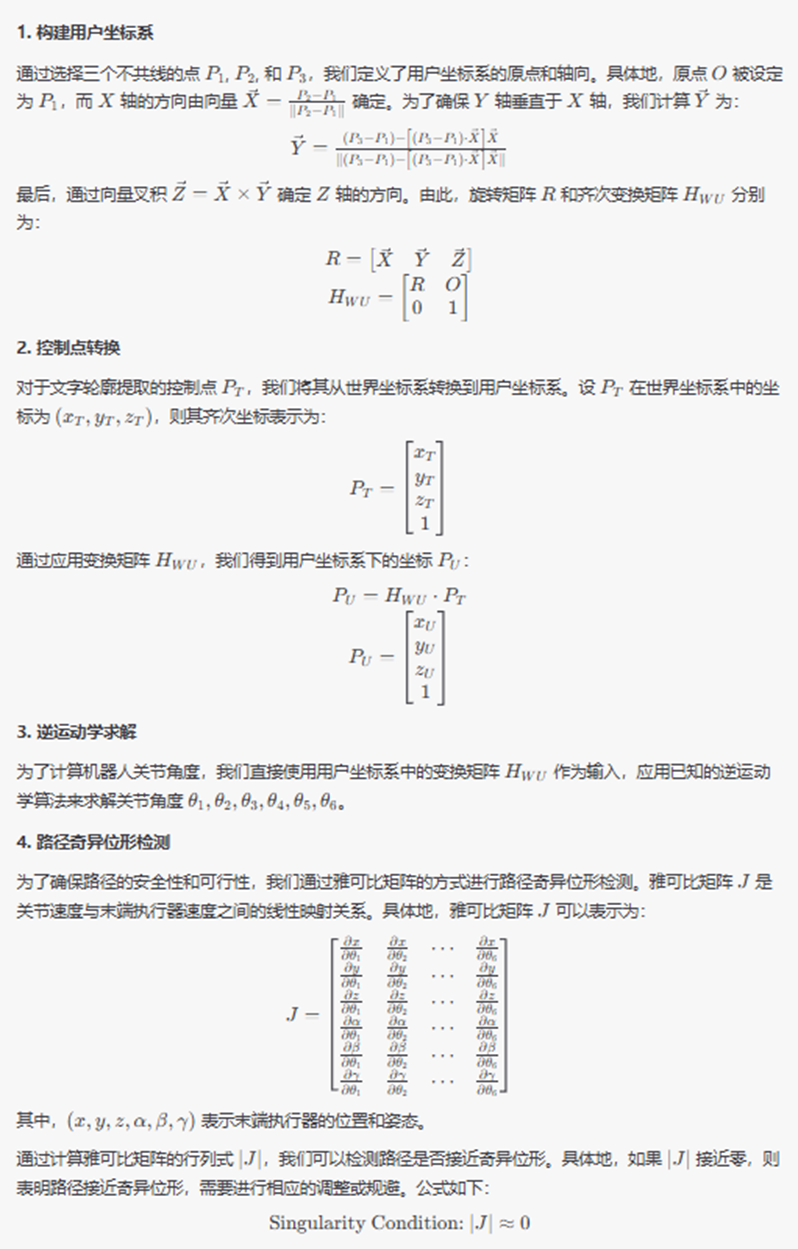
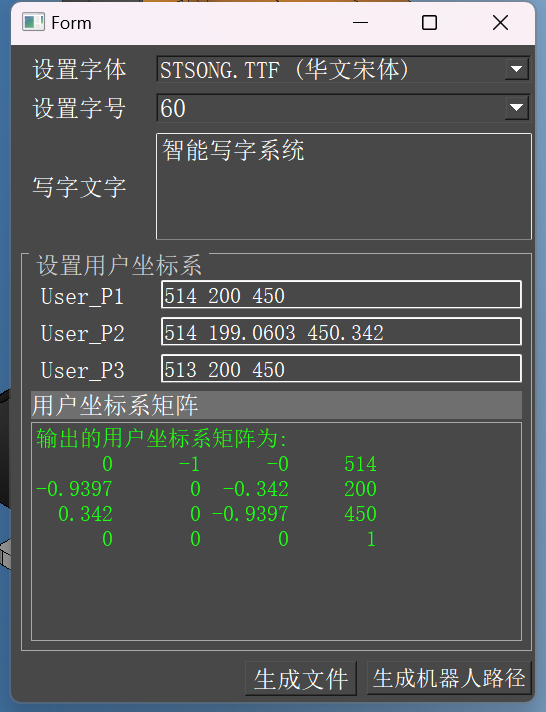
2.轨迹转化到用户坐标系下(算法说明)
构建用户坐标系
字体路径点转化到用户坐标系下
将点位通过机器人逆运动学算法转化为对应的关节角度
通过机器人雅可比矩阵行列式是否为0检测是否有路径不可达的机器人奇异位形
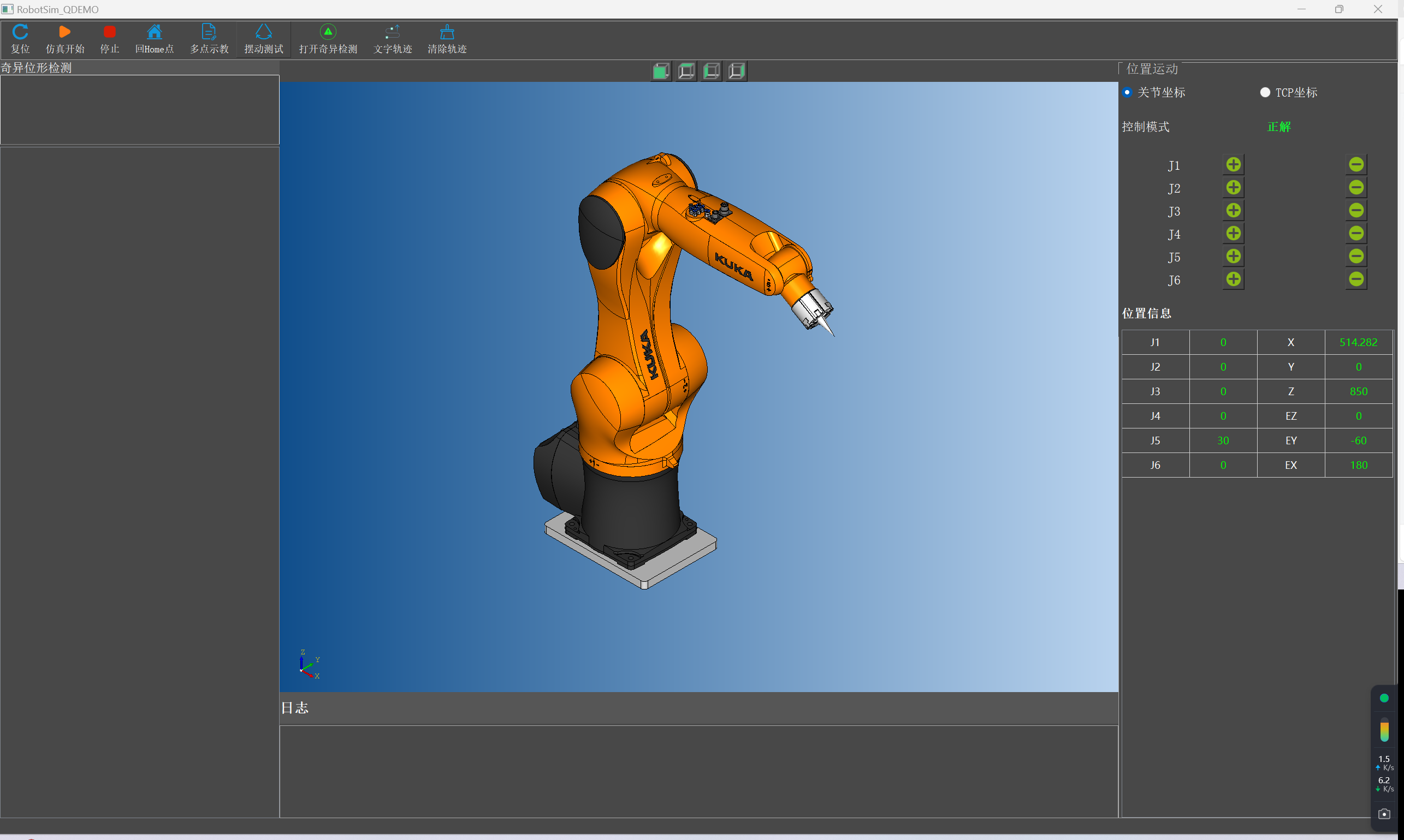
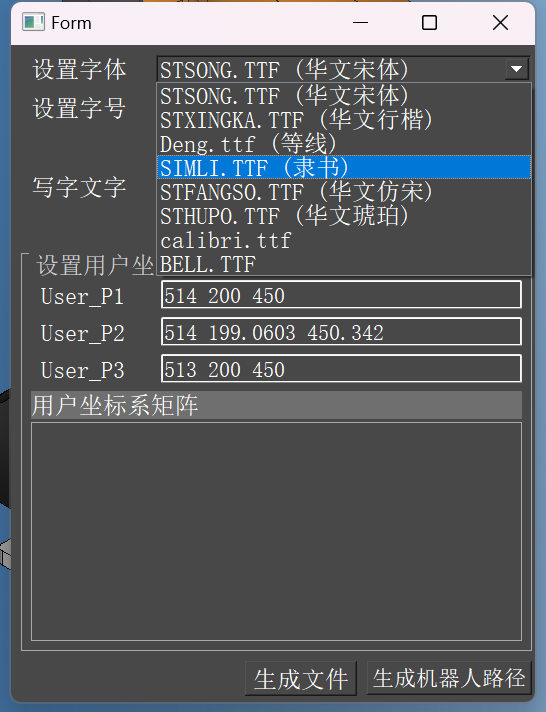
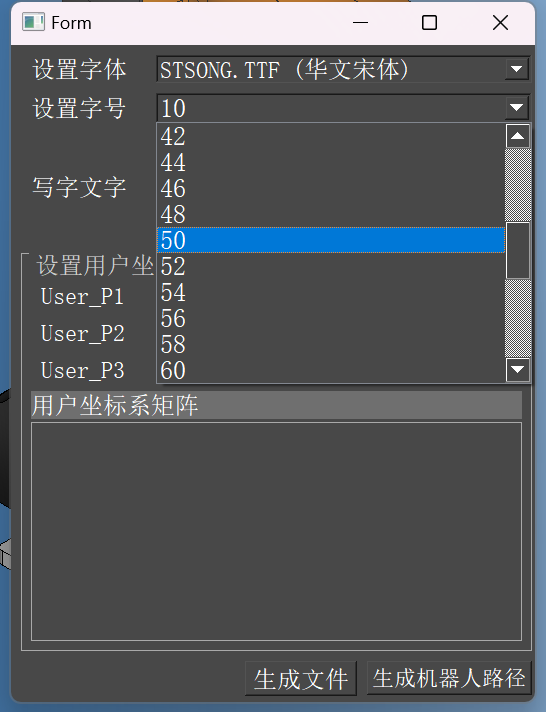
3.仿真操作界面及实现效果
主界面
文字轨迹生成界面
奇异监测和轨迹点
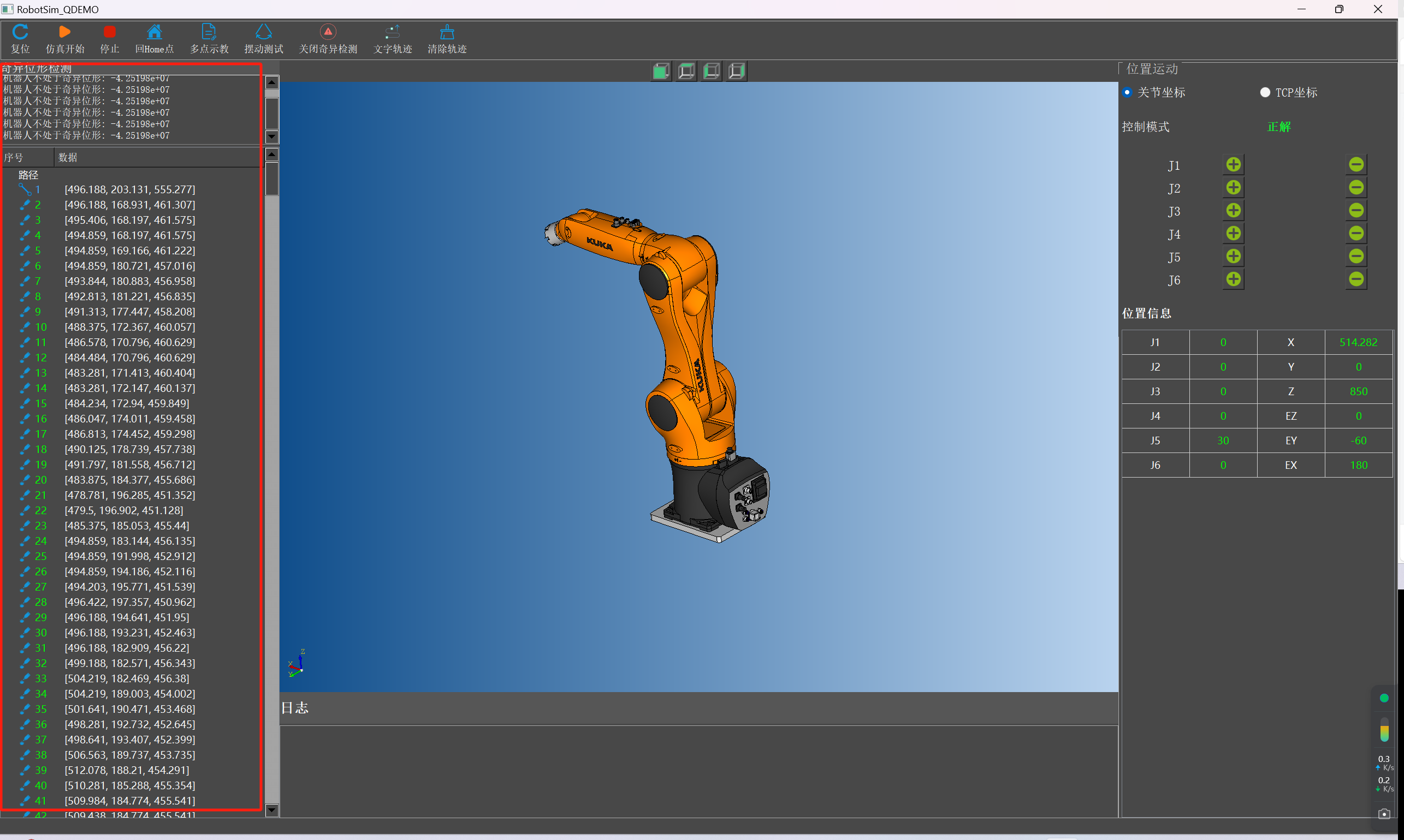
实现效果
视频
20240702_151608















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









