







 本文深入解析了Openpilot开源项目,它是一款基于端到端模型实现L2+自动驾驶的系统,只需乐视手机和高通骁龙821芯片。Openpilot包括环境感知、规划控制、DMS模型、定位算法和安全规范,拥有完善的生态体系。通过开源社区和数据闭环,不断迭代改进,实现了令人惊讶的自动驾驶功能。
本文深入解析了Openpilot开源项目,它是一款基于端到端模型实现L2+自动驾驶的系统,只需乐视手机和高通骁龙821芯片。Openpilot包括环境感知、规划控制、DMS模型、定位算法和安全规范,拥有完善的生态体系。通过开源社区和数据闭环,不断迭代改进,实现了令人惊讶的自动驾驶功能。
目录
0.前言
目前市场上的已经量产并产品化的车端自动驾驶方案,如特斯拉基于纯视觉环视自动驾驶方案,又如Mobileye的True Redundancy方案,即纯相机方案 + 雷达与激光雷达方案形成一冗余的自动驾驶方案。这两种方案对移动平台的算力要求不容忽视,就Tesla 2021 AI DAY 公布的FSD chip就达到144TOPS,Mobileye面向L4级自动驾驶推出的EyeQ Ultra,其AI算力更是能够达到176TOPS。虽然两者在TOPS上面都不是最出彩的,但拼算力的背后,也道出了算法模型复杂度不断攀升的原因。但是,通过我们PerceptionX的研究,今天想为大家介绍一款经济实用且性价比超高的自动驾驶外装产品,来自Comma.ai 的Openpilot,它仅仅用一款乐视手机以及高通骁龙821芯片,搭载openpilot software,就能实现L2+自动驾驶。
感谢PerceptionX 蔡老师这篇文章的大力支持,若有建设性问题,请联系 caizhitian@pjlab.org.cn 。自动驾驶团队OpenPerceptionX是上海人工智能实验室的智能驾驶感知团队,致力于探索前沿的学术界与工业界感知、融合、端到端算法,感兴趣同学请联系小编Hugo maihaoguang@pjlab.org.cn ,我们在招聘!
上海人工智能实验室坐落于美丽的徐汇滨江,这里即有学术大牛具体指导实习生、刚入职的校招生;也适合工作多年的社招大佬在这里充分展现自己的价值。我们坚信在这里能做出solid impact的工作、对标国际一流实验室成果。
PS: 未经许可,禁止私自转载。
1.整体介绍
What is Openpilot?
在探索基于端到端的自动驾驶过程中,一次偶然的机会,我们接触到了Openpilot这款产品,它是一套比较成熟的面向L2辅助驾驶功能的开源项目,基于端到端模型实现了ACC、LKA、DMS等辅助驾驶功能。目前,已经面向消费者售卖,能够适配了多种车型,通过简单的安装在自己的车上便能够体验辅助驾驶功能。
相关链接
公司官网: https://comma.ai/
开源项目: https://github.com/commaai/openpilot
Demo视频:https://www.youtube.com/watch?v=XOsa0FsVIsg
Openpilot夜晚效果:https://www.youtube.com/watch?v=aUncj2myFwc
Openpilot vs Tesla Autopilot:https://www.youtube.com/watch?v=YJzvrDBQwOE
第三方评测表现,此为2020年基于消费者使用评价进行统计出来的评测报告。

通过以上视频demo以及第三方评测,可以看出Openpilot整体产品表现还是比较惊艳的,针对这款产品,我们列了一些核心的Keypoints :
- 首款开源的基于端到端(Perception to Planning)的辅助驾驶系统
- 采用自标定模块,相机安装简单
- 整体算法思路很新奇
- 将感知+规划放到一个model
- 引入时序信息
- 关注最危险的几个目标/输出速度
- 数据体系/生态体系完善
- 积累了大量数据
- 用户可以自行上传数据
- 开源社区共同服务
2.系统架构与硬件配置
2.1 系统架构
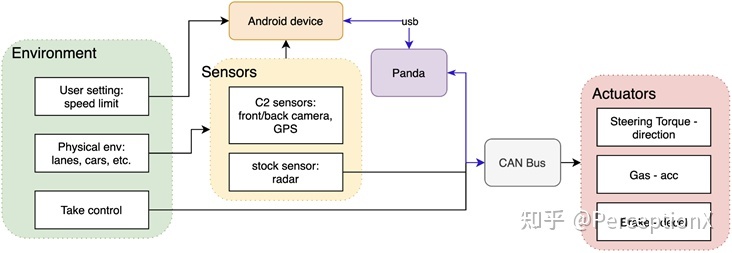
整体系统架构如图所示,可分为四个部分
- 环境:
- 配置
- 接管
- 物理环境
- 车机:
- CommaTwo device
- CAN bus
- Panda(连接CAN和CommaTwo的硬件适配器)
- Stock sensors
- Actuators (执行器,例如方向盘steering、油门gas、刹车brake)
- Sensors:
- Cameras: 前视和车舱内部两个摄像头
- GPS
- Software components:
- Infrastructure
- Communication dependencies
- Selfdrive Core
- Radar
- Planner
- Control
2.2 硬件配置
前面架构图中的CommaTwo device根据乐视手机改装而来,至于为什么要用乐视手机改装呢?通过查阅官网资料了解到,由于CommaTwo采用高通骁龙821芯片,支持这款芯片的手机包括乐视3Pro,目前只适配了乐视这款手机的camera接口,如果采用其他型号还需自己去适配camera。下面展示了该设备的具体参数

3.量产安全规范体系
Openpilot作为一款已经量产的辅助驾驶产品,因此每次发版上市都要遵循相关的法律法规,保证功能安全。对于Openpilot而言,整体的安全规范流程如图所示

- 从图中可以看出Openpilot功能生产遵循ISO26262标准,ASIL安全评级、DFMEA(潜在失效模式与效应的分析)、NHTSA(美国国家公路安全管理局)以及FMVSS(美国公路机动车安全标准)标准
- 对于汽车系统,ASIL安全等级划分为QM、A、B、C、D五个等级,QM代表与安全无关,D等级最高。考虑因素包括:
- 严重性(Severity of failure,S):致命伤S3
- 可能性(Probability of exposure,E):高可能性E4
- 可控性(Controllability,E):难以控制C3
- Openpilot系统ASIL等级为D=S3 + E4 + C3 </
- 对于汽车系统,ASIL安全等级划分为QM、A、B、C、D五个等级,QM代表与安全无关,D等级最高。考虑因素包括:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2332
2332

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









