







通过本节可以了解到
- 为什么需要深度缓冲区?
- OpenGL中怎么使用深度缓冲区 ?
- 可视化深度值
- 深度值的精度问题-ZFighting
问题背景
在绘制3D场景的时候,我们需要决定哪些部分对观察者是可见的,或者说哪些部分对观察者不可见,对于不可见的部分,我们应该及早的丢弃,例如在一个不透明的墙壁后的物体就不应该渲染。这种问题称之为隐藏面消除(Hidden surface elimination),或者称之为找出可见面(Visible surface detemination)。
解决这一问题比较简单的做法是画家算法(painter’s algorithm)。画家算法的基本思路是,先绘制场景中离观察者较远的物体,再绘制较近的物体。例如绘制下面图中的物体(来自Z buffer 和 W buffer 簡介),先绘制红色部分,再绘制黄色,最后绘制灰色部分,即可解决隐藏面消除问题。
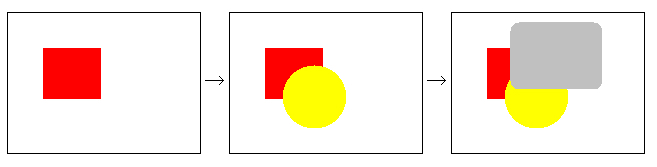
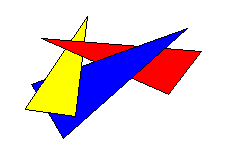
使用画家算法时,只要将场景中物体按照离观察者的距离远近排序,由远及近的绘制即可。画家算法很简单,但另一方面也存在缺陷,例如上图中,三个三角形互相重叠的情况,画家算法将无法处理
解决隐藏面消除问题的算法有很多,具体可以参考Visible Surface Detection。结合OpenGL,我们使用的是Z-buffer方法,也叫深度缓冲区Depth-buffer。
深度缓冲区(Detph buffer)同颜色缓冲区(color buffer)是对应的,颜色缓冲区存储的像素的颜色信息,而深度缓冲区存储像素的深度信息。在决定是否绘制一个物体的表面时,首先将表面对应像素的深度值与当前深度缓冲区中的值进行比较,如果大于等于深度缓冲区中值,则丢弃这部分;否则利用这个像素对应的深度值和颜色值,分别更新深度缓冲区和颜色缓冲区。这一过程称之为深度测试(Depth Testing)。在OpenGL中执行深度测试时,我们可以根据需要指定深度值的比较函数,后面会详细介绍具体使用。
OpenGL中使用深度测试
深度缓冲区一般由窗口管理系统,例如GLFW来创建,深度值一般由16位,24位或者32位值表示,通常是24位。位数越高的话,深度的精确度越好。前面我们已经见过了如何在OpenGL中使用深度测试,这里复习下过程。首先我们需要开启深度测试,默认是关闭的:
- 1
另外还需要在绘制场景前,清除颜色缓冲区时,清除深度缓冲区:
- 1
- 2
清除深度缓冲区的默认值是1.0,表示最大的深度值,深度值的范围在[0,1]之间,值越小表示越靠近观察者,值越大表示远离观察者。
上面提到了在进行深度测试时,当前深度值和深度缓冲区中的深度值,进行比较的函数,可以由用户通过glDepthFunc指定,这个函数包括一个参数,具体的参数如下表所示:
| 函数参数 | 说明 |
|---|---|
| GL_ALWAYS | 总是通过测试 |
| GL_NEVER | 总是不通过测试 |
| GL_LESS | 在当前深度值 < 存储的深度值时通过 |
| GL_EQUAL | 在当前深度值 = 存储的深度值时通过 |
| GL_LEQUAL | 在当前深度值 <= 存储的深度值时通过 |
| GL_GREATER | 在当前深度值 > 存储的深度值时通过 |
| GL_NOTEQUAL | 在当前深度值 不等于 存储的深度值时通过 |
| GL_GEQUAL | 在当前深度值 >= 存储的深度值时通过 |
例如我们可以使用GL_AWALYS参数,这与默认不开启深度测试效果是一样的:
- 1
下面我们绘制两个立方体和一个平面,通过对比开启和关闭深度测试来理解深度测试。
当关闭深度测试时,我们得到的效果却是这样的:
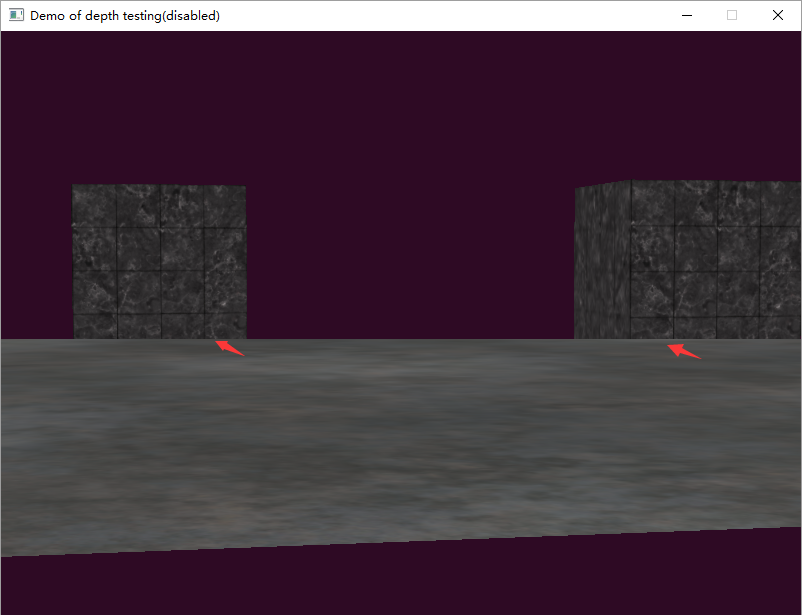
这里先绘制立方体,然后绘制平面,如果关闭深度测试,OpenGL只根据绘制的先后顺序决定显示结果。那么后绘制的平面遮挡了一部分先绘制的本应该显示出来的立方体,这种效果是不符合实际的。
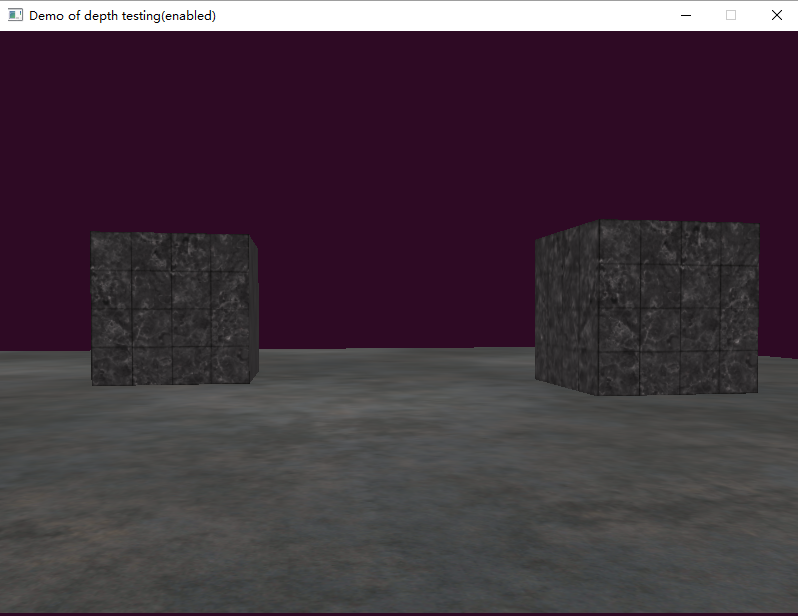
我们开启深度测试后绘制场景,得到正常的效果如上图右。
使用深度测试,最常见的错误时没有使用glEnable(GL_DEPTH_TEST);
开启深度测试,或者没有使用glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);清除深度缓冲区。
与深度缓冲区相关的另一个函数是glDepthMask,它的参数是布尔类型,GL_FALSE将关闭缓冲区写入,默认是GL_TRUE,开启了深度缓冲区写入。
可视化深度值
在可视化深度值之前,首先我们要明白,这里的深度值,实际上是屏幕坐标系下的 zwin 坐标,屏幕坐标系下的(x,y)坐标分别表示屏幕坐标系下以左下角(0,0)为起始点的坐标。 zwin 我们如何获取呢? 可以通过着色器的输入变量gl_FragCoord.z来获取,这个gl_FragCoord的z坐标表示的就是深度值。
我们在着色器中以这个深度值为颜色输出:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
输出后的效果如下图所示:


可以看到图中,只有离观察者较近的部分有些黑色,其余的都是白色。这是因为深度值
zwin
和
zeye
是成非线性关系的,在离观察者近的地方,精确度较高,
zwin
值都保持在较小范围,成黑色。但是一旦超出一定距离,精确度变小,
zwin
值都挤在1.0附近,因此成白色。当我们向后移动,拉远场景与观察者的距离后,
zwin
值都落在1.0附近,整个场景都变成白色,如上图右所示:
实际使用时不使用 zwin 和 zeye 的线性关系,因为在场景中,近处的物体,我们想让它看的清楚,自然 要求精度高;但是远处的物体,我们不需要很清晰的看到细节,因此精确度不必和近处的物体一样。使用公式(7)绘制的 zwin 和 zeye 关系图如下所示(来自:www.learnopengl.com Depth testing):
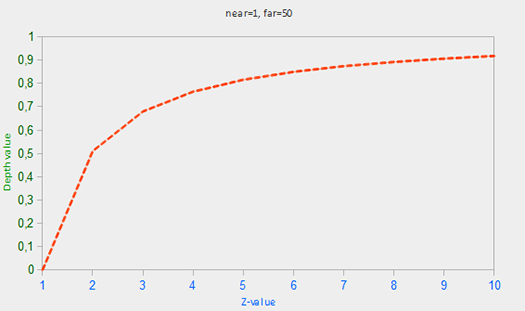
我们看到, zeye 在[1.0,2.0]范围内时 zwin 保持在0.5的范围内,精确度高。而当 zeye 超过10.0后, zwin 的值就在0.9以后了,也就是说 zwin 在[10.0,50.0]范围内的深度值将挤在[0.9,1.0]这么一个小的范围内,精确度很低。
当 zeye 在[-395,-1000]范围内时,深度值将全部挤在65534或者65535这两个值上,也就是说几乎60%的 zeye 只能分配1到2个深度值,可见当 zeye 超过一定范围后,精度值是相当低的。(这个例子原本解释来自depth buffer faq)。
当深度值精确度很低时,容易引起ZFighting现象,表现为两个物体靠的很近时确定谁在前,谁在后时出现了歧义。例如上面绘制的平面和立方体,在y=-0.5的位置二者贴的很近,如果进入立方体内部观察,则出现了ZFighting现象,立方体的底面纹理和平面的纹理出现了交错现象,如下图所示:
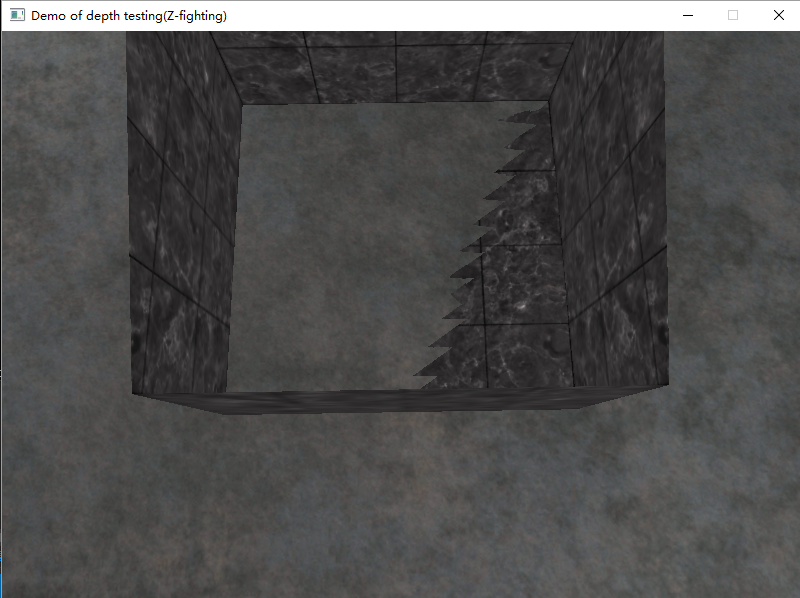
(如果你要亲自观察这个现象,只需要在本节代码中,将相机位置放在立方体内部,稍微调整鼠标观察角度就可以了,并且GL_CULL_FACE不能enable)。
预防ZFighting的方法
1.不要将两个物体靠的太近,避免渲染时三角形叠在一起。这种方式要求对场景中物体插入一个少量的偏移,那么就可能避免ZFighting现象。例如上面的立方体和平面问题中,将平面下移0.001f就可以解决这个问题。当然手动去插入这个小的偏移是要付出代价的。
2.尽可能将近裁剪面设置得离观察者远一些。上面我们看到,在近裁剪平面附近,深度的精确度是很高的,因此尽可能让近裁剪面远一些的话,会使整个裁剪范围内的精确度变高一些。但是这种方式会使离观察者较近的物体被裁减掉,因此需要调试好裁剪面参数。
3.使用更高位数的深度缓冲区,通常使用的深度缓冲区是24位的,现在有一些硬件使用使用32位的缓冲区,使精确度得到提高。
当然还有其他方法,这里不再展开了。
最后的说明
本节了解了深度测试的问题背景,OpenGL中的使用方法。通过可视化深度值和给出深度的计算过程,让我们了解深度的精确度问题。还有一些问题没有在本节探讨,包括gl_FragCoord,gl_FragDepth的含义和计算方法,等待后面再继续学习。另外关于fragment,pixel的区别还需要做进一步了解,本文关于这部分的表述还有待改善















 2401
2401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









