







递推最小二乘
算法中需要递推数据,因此将k次数据排成列向量,其实本质上最小二乘就是对冗余的数据进行估计,关键时要推导出k个数据的结果和k+1个数据的结果的关系。
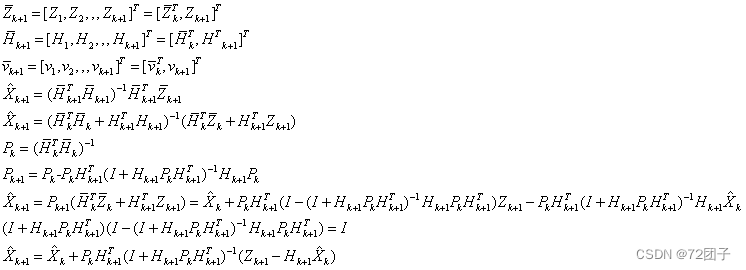
由于矩阵和的逆阵的展开很长,式子很长,但是从中可以看出,递推式使用了过去推断,加上现在观测,两者取了权重,可以联想到低通滤波器,其实都是数据权重的选取。对数据的滤波本质上就是对各种数据进行权重的处理。
递推最小二乘
同上,不过在其中加入权重阵W
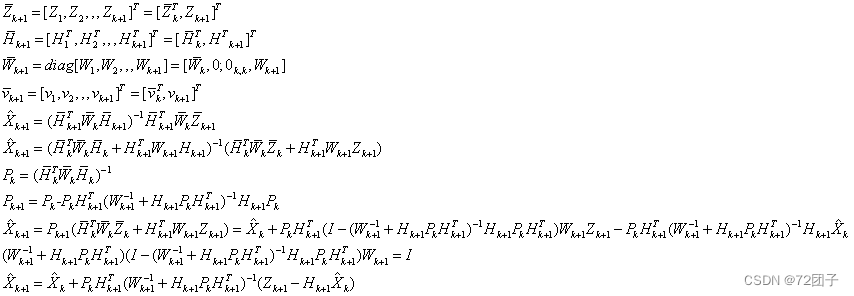
再进一步
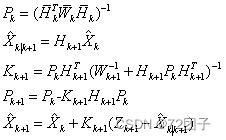
如果将k时刻的P阵替换为一步外推的P阵,那么和kalman滤波的公式完全相同,即kalman滤波可以理解为递推权重最小二乘,能将预测值的方差小于任意观测值的方差,用这种方式来直观理解kalman滤波是最能让人接受的。对于加入误差协方差外推阵,可以从状态估计对的最终表达式看出,由于使用了一步预测的状态值,因此使用的误差协方差阵也应该更新为一步预测的误差协方差阵,考虑协方差的传播特性,补上方程
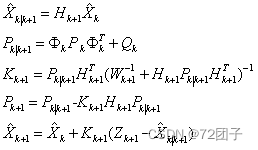
此即为kalman滤波的方程。
Kalman滤波的方程上由于考虑舍入误差的影响,P阵的计算会有不同的形式。
接下来,还有一个大问题:为什么kalman滤波器的控制输入没有体现?















 921
921











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









