







import torch.nn
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
class InceptionA(torch.nn.Module):
def __init__(self,in_channels):
super(InceptionA, self).__init__()
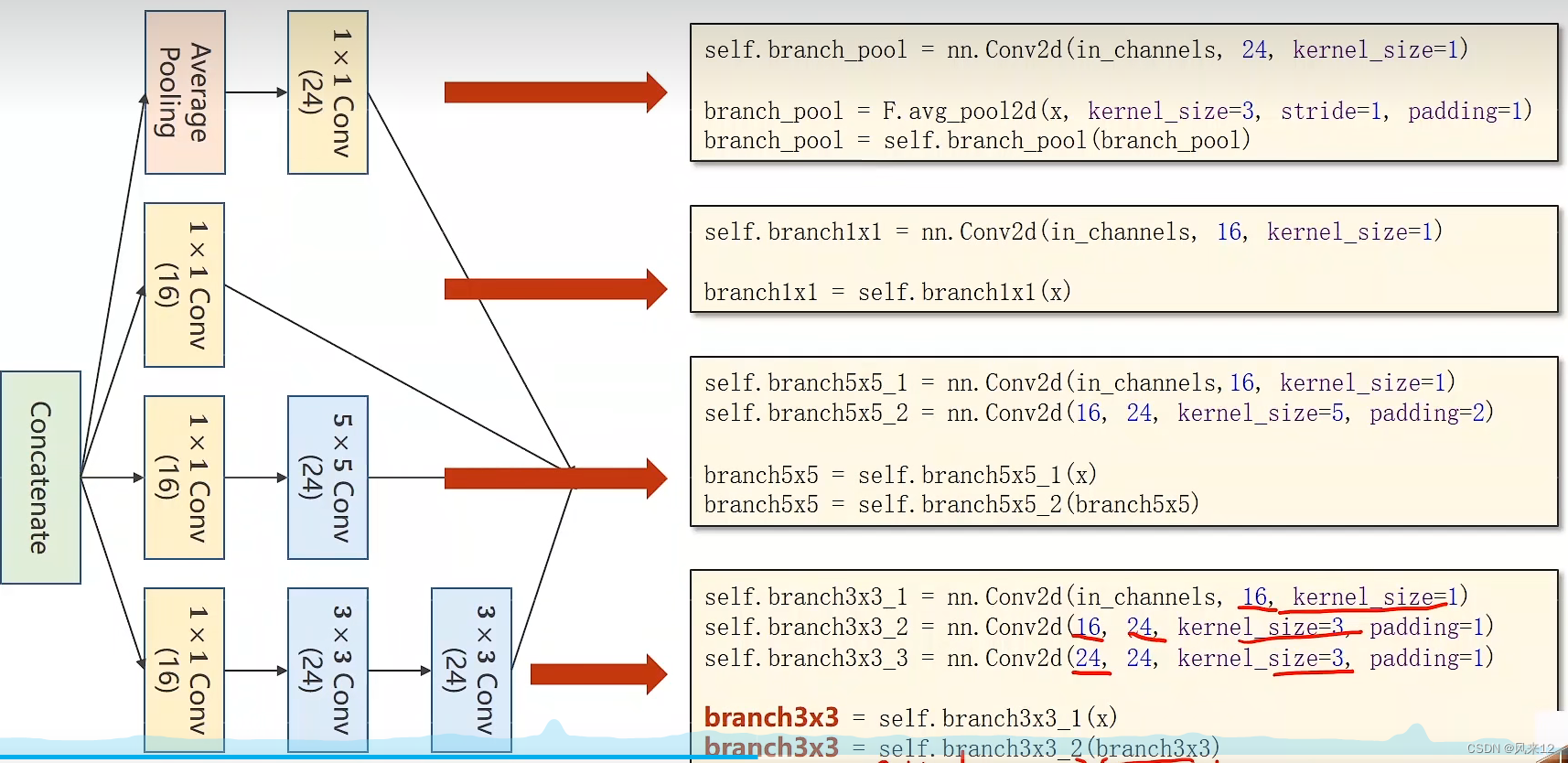
self.branch1x1=torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_1=torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_2=torch.nn.Conv2d(16,14,kernel_size=5,padding=2)
self.branch3x3_1=torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch3x3_2=torch.nn.Conv2d(16,24,kernel_size=3,padding=1)
self.branch3x3_3=torch.nn.Conv2d(24,24,kernel_size=3,padding=1)
self.branch_pool = torch.nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self,x):
branch1X1=self.branch1x1(x)
branch5X5=self.branch5x5_1(x)
branch5X5=self.branch5x5_2(branch5X5)
branch3x3=self.branch3x3_1(x)
branch3x3=self.branch3x3_2(x)
branch3x3=self.branch3x3_3(x)
branch_pool=F.avg_pool2d(x,kernel_size=3,stride=1,padding=1)
branch_pool=self.branch_pool(branch_pool)
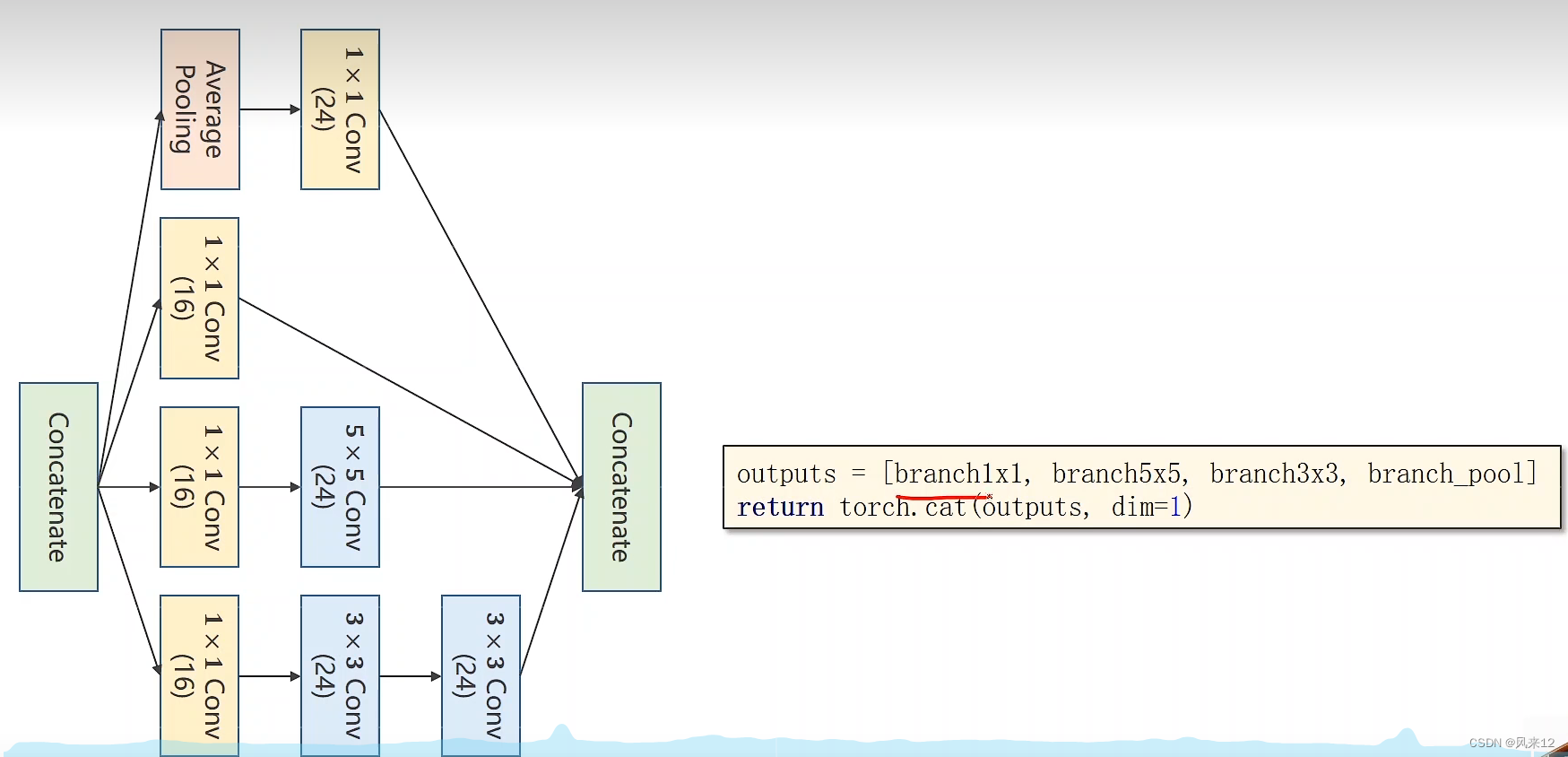
outputs=[branch1X1,branch5X5,branch3x3,branch_pool]
return torch.cat(outputs,dim=1)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1=torch.nn.Conv2d(1,10,kernel_size=5)
self.conv2=torch.nn.Conv2d(88,20,kernel_size=5)
self.incep1=InceptionA(in_channels=10)
self.incep2=InceptionA(in_channels=20)
self.mp=torch.nn.MaxPool2d(2)
self.fc=torch.nn.LinearModel(1408,10)
def forward(self,x):
in_size=x.size(0)
x=F.relu(self.mp(self.conv1(x)))
x=self.incep1(x)
x=F.relu(self.mp(self.conv2(x)))
x=self.incep2(x)
x=x.view(in_size,-1)
x=self.fc(x)
return x















 817
817











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









