









目录
1.算法运行效果图预览
2.算法运行软件版本
MATLAB2022A
3.部分核心程序
.....................................................................
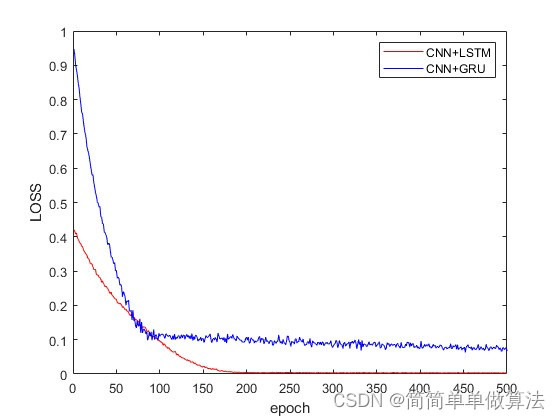
IT =[1:length(INFO.TrainingLoss)];
LOSS=INFO.TrainingLoss;
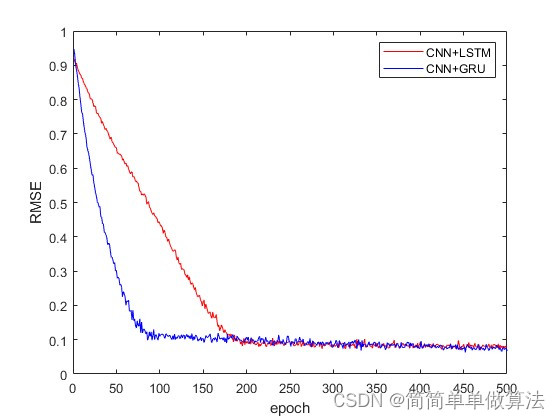
Accuracy=INFO.TrainingRMSE;
figure;
plot(IT(1:1:end),LOSS(1:1:end));
xlabel('epoch');
ylabel('LOSS');
figure;
plot(IT(1:1:end),Accuracy(1:1:end));
xlabel('epoch');
ylabel('RMSE');
%数据预测
Dpre1 = predict(Net, Nsp_train2);
Dpre2 = predict(Net, Nsp_test2);
%归一化还原
T_sim1=Dpre1*Vmax2;
T_sim2=Dpre2*Vmax2;
figure
subplot(211);
plot(1: Num1, Tat_train,'-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.99,0.4,0.0]);
hold on
plot(1: Num1, T_sim1,'g',...
'LineWidth',2,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
legend('训练样本真实值', '训练样本预测值')
xlabel('预测样本')
ylabel('预测结果')
grid on
subplot(212);
plot(1: Num1, Tat_train-T_sim1','-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
xlabel('训练样本预测样本')
ylabel('训练样本预测误差')
grid on
ylim([-50,50]);
ERR1=mean(abs(Tat_train-T_sim1'));
title(['误差均值:',num2str(ERR1)]);
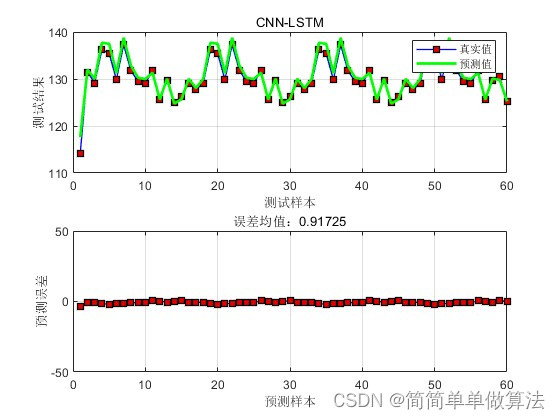
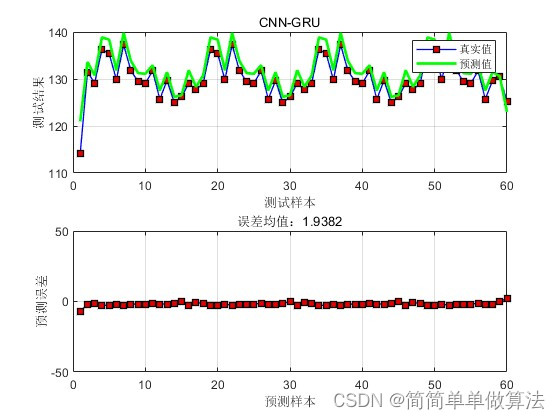
figure
subplot(211);
plot(1: Num2, Tat_test,'-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.99,0.4,0.0]);
hold on
plot(1: Num2, T_sim2,'g',...
'LineWidth',2,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
legend('测试样本真实值', '测试样本预测值')
xlabel('测试样本')
ylabel('测试结果')
grid on
subplot(212);
plot(1: Num2, Tat_test-T_sim2','-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
xlabel('测试样本预测样本')
ylabel('测试样本预测误差')
grid on
ylim([-50,50]);
ERR2=mean(abs(Tat_test-T_sim2'));
title(['误差均值:',num2str(ERR2)]);
save R1.mat
1394.算法理论概述
时间序列预测是数据分析中的一个重要分支,它涉及到对未来事件的预测,基于历史数据中的模式和趋势。在深度学习领域,卷积神经网络(CNN)和循环神经网络(RNN)的组合,特别是结合长短时记忆单元(LSTM)或门控循环单元(GRU),已成为处理时间序列数据的强大工具。
4.1 CNN基础
卷积神经网络(CNN)最初设计用于图像识别,但其强大的特征提取能力同样适用于时间序列数据。CNN通过卷积层捕获局部特征,池化层降低数据维度,从而提取时间序列中的模式。对于一维时间序列数据,卷积操作定义为:

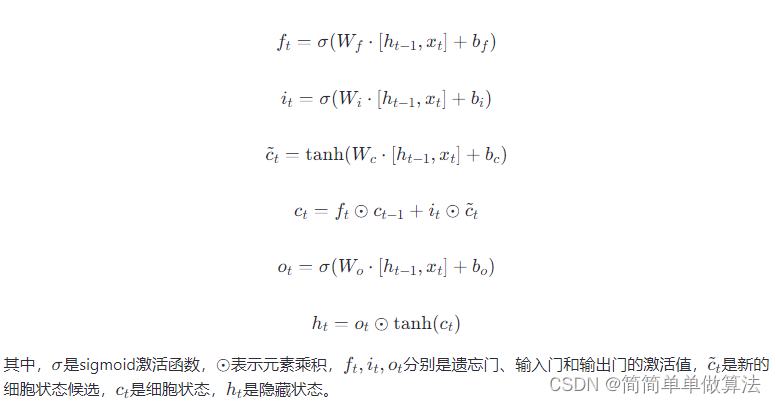
4.2 LSTM原理
长短时记忆网络(LSTM)是RNN的一种特殊类型,特别擅长处理长序列数据,通过其独特的门机制(输入门、遗忘门、输出门和细胞状态)来控制信息的流动,从而解决了传统RNN中长期依赖问题。LSTM单元的更新可以表示为:
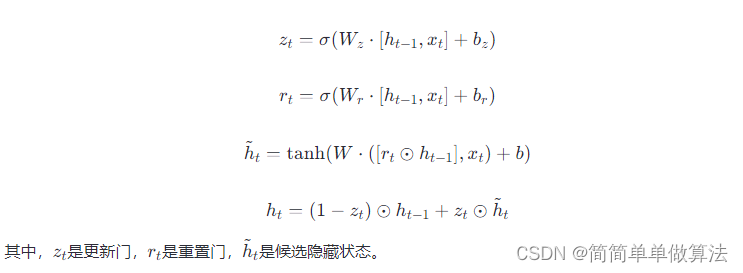
4.3 GRU原理
门控循环单元(GRU)是LSTM的一个简化版本,它合并了输入门和遗忘门为单一的更新门,同时合并了细胞状态和隐藏状态,减少了模型的复杂性,但仍然能够有效处理长序列数据。GRU的更新公式为:
4.4 CNN+LSTM与CNN+GRU对比
共同点:
- 两者的结合都是先通过CNN提取时间序列的局部特征,然后利用RNN(LSTM或GRU)处理序列特征,捕捉长时依赖。
- 在时间序列预测中,CNN通常用于降维和特征提取,RNN则用于序列建模。
差异:
- 复杂性与计算效率:GRU结构相对简单,参数较少,计算速度较快,适合资源有限的场景。LSTM虽然复杂,但理论上能更好地处理长期依赖问题。
- 记忆机制:LSTM通过独立的输入门、遗忘门和输出门精细控制信息流动,而GRU通过更新门和重置门合并了这些功能,牺牲了一定的控制精细度,换取了模型的简洁。
- 应用场景:对于需要细致控制信息遗忘和存储的复杂序列预测任务,LSTM可能更优;而对于追求效率和较简单序列模式识别,GRU可能是更好的选择。
5.算法完整程序工程
OOOOO
OOO
O
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











