







前言
上一篇中围绕一个简单的扩展卡尔曼滤波算法的实现案例阐述。本篇主要针对两种不同的导航系统进行展开讨论——松组合与紧组合导航系统。
捷联惯导系统(SINS)利用陀螺仪、加速度计等惯性器件进行目标的位置、速度估计,其缺点是误差随时间累积。全球定位系统(GPS)定位和测速精度较高,然而其信号有可能中断或受干扰,造成短时间无法正常使用的情况,因此,将SINS与GPS进行优势互补,即组成组合导航系统。
松组合导航系统
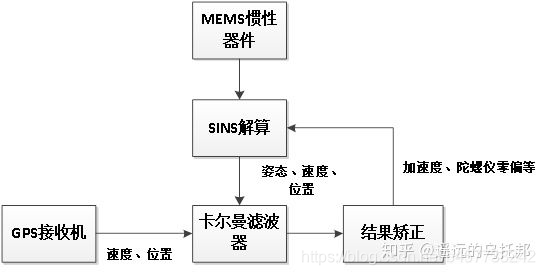
松组合导航系统是一种相对简单的组合方式,在该方式下,GPS与SINS各自独立工作,最终将两者数据融合,用于修正SINS系统的相关参数,最终给出较好的导航估计结果。
以多旋翼飞行器为例,松组合结构框图如下所示,
紧组合导航系统
紧组合是一种相对复杂的组合方式,在该组合方式中,利用GPS接收机提供的卫星定位原始信息,如伪距、伪距率以及多普勒频率等,相对而言,紧组合导航系统具有更高的导航解算精度。同时,当载体运动或外界信号干扰时,紧组合导航系统依然能够利用有限的GPS信息,进行导航解算,避免组合导航系统退化为纯
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7572
7572











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









