






EKF INS/GPS松组合导航,15状态,地理系采用NED(北东地)
ID:38650730223417186
喜欢撸代码的博士僧
EKF INS GPS松组合导航是一种常用于航空航天领域的导航算法。本文将围绕该导航算法进行详细分析和讨论。在介绍EKF INS GPS松组合导航的基本原理之前,我们先了解一下相关的背景知识。
INS(惯性导航系统)是一种基于航空器本身的加速度计和陀螺仪进行位置和姿态估计的导航系统。GPS(全球定位系统)是一种基于卫星信号的导航系统。INS在短时间内提供高精度的位置和姿态信息,但是随着时间的推移,误差会逐渐累积。而GPS的优势在于提供了全球范围内的准确位置信息,但是在城市等遮挡物较多的地区,GPS信号可能会受到干扰。
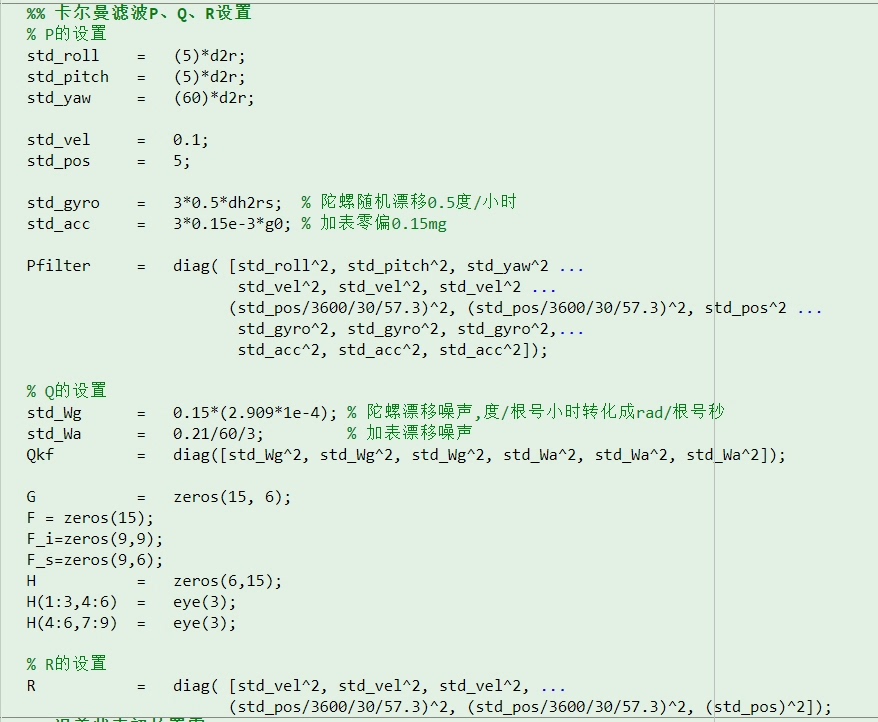
为了充分发挥INS和GPS的优势,EKF(扩展卡尔曼滤波)被引入到导航系统中。EKF是一种基于卡尔曼滤波的状态估计算法,通过将INS和GPS的测量结果进行融合和滤波,从而得到更为精确和稳定的导航信息。
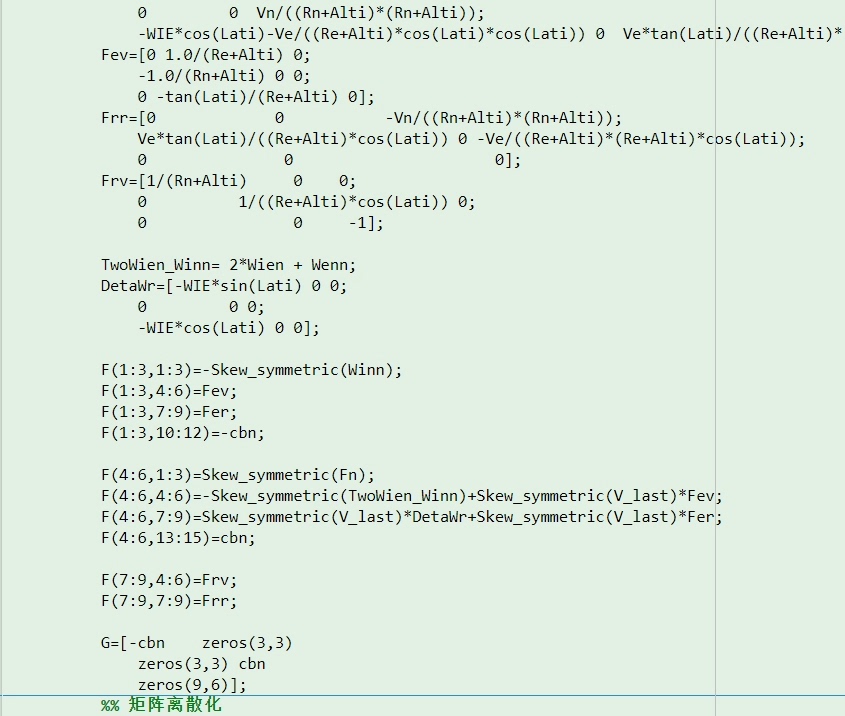
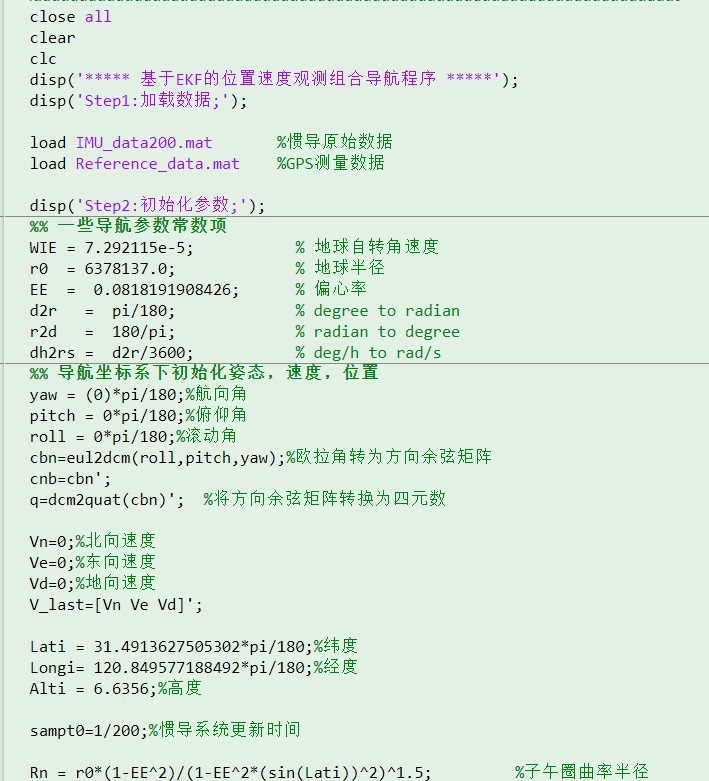
在EKF INS GPS松组合导航中,导航状态的表示采用了15状态的模型。这些状态包括位置、速度、姿态、速度偏差、姿态偏差等参数。地理系采用NED(北东地)坐标系,即以北、东和垂直向上为坐标轴。这种表示方式有助于简化导航算法的实现,并提高算法的计算效率。
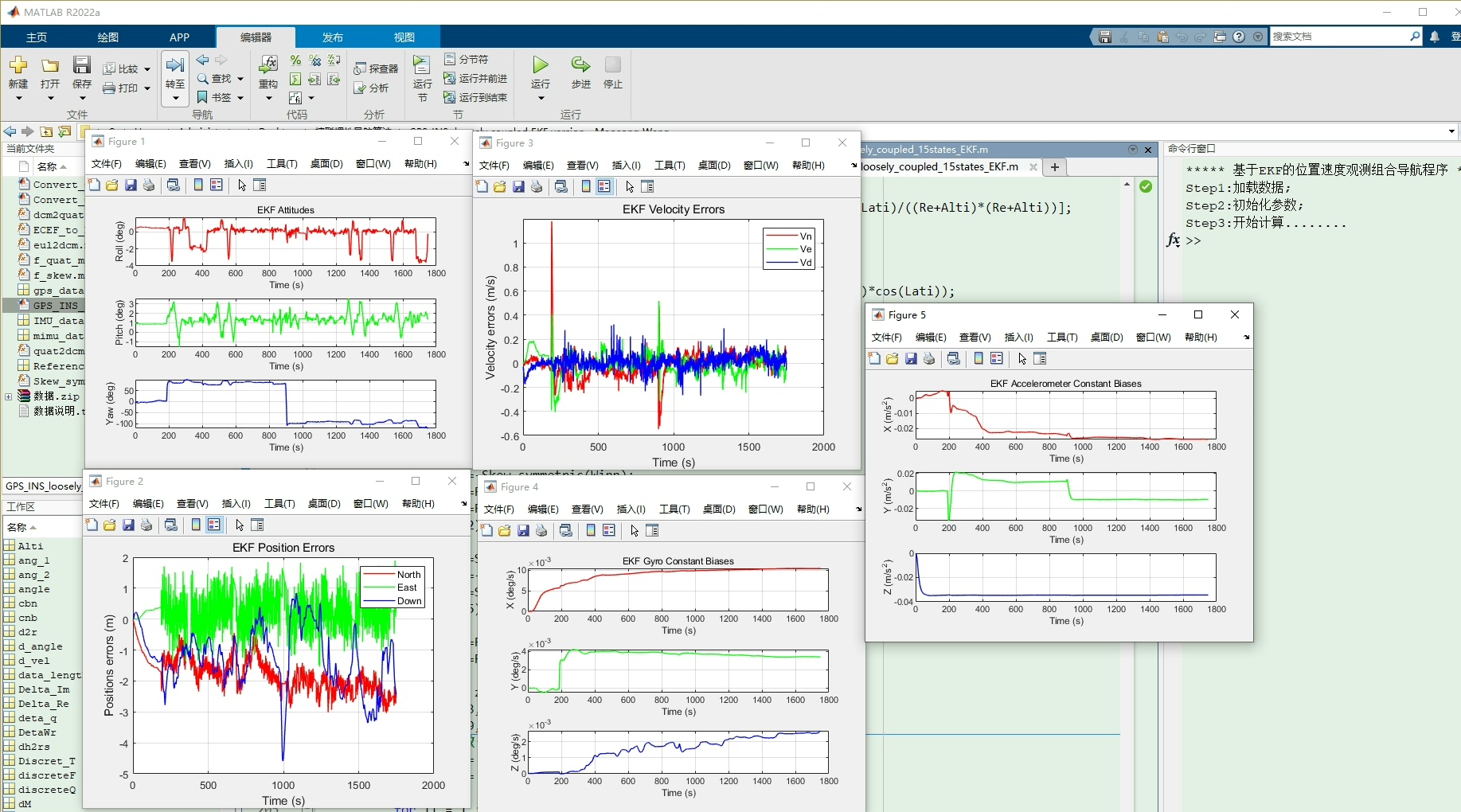
EKF INS GPS松组合导航的核心思想是通过EKF算法对INS和GPS的测量结果进行滤波和融合,从而得到更可靠和准确的导航信息。EKF算法主要包括两个步骤:预测步骤和更新步骤。在预测步骤中,根据系统的动力学模型和传感器的测量结果,对导航状态进行预测。在更新步骤中,通过比较预测值和实际测量值之间的差异,对导航状态进行修正。
在实际应用中,EKF INS GPS松组合导航算法需要考虑多个因素的影响,例如传感器的精度、噪声、非线性等。为了提高算法的性能,还需要对系统进行校准和初始化,同时进行误差补偿和滤波处理。
总结起来,EKF INS GPS松组合导航是一种有效的导航算法,通过融合INS和GPS的测量结果,能够提供更为准确和稳定的导航信息。这种导航算法在航空航天等领域具有广泛应用前景。未来的研究方向可以包括进一步改进算法的性能和精度,考虑多传感器融合和无人机导航等新兴应用场景。
通过本文的介绍和分析,相信读者对EKF INS GPS松组合导航算法有了更深入的了解。希望本文能够为相关领域的技术人员提供有价值的参考和启示,促进技术的进步和应用的推广。
【相关代码,程序地址】:http://fansik.cn/730223417186.html
















 2833
2833











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









