







机器人运动学仿真笔记
- 安川机器人当前(基座)位姿是工具坐标系在基座下的位姿,欧拉角zyx。
- SFTON一般用于四自由度x、y、z、Rz的补偿。
- 内部计算指令:MULMAT(取数据 2 和数据 3 的矩阵积,结果保存到数据 1 里)可以进行矩阵运算。但是一般情况下两种方式,
- 建立用户坐标系然后输入目标位姿;
- 利用基座坐标系,返回最终目的。
分析:1、用户坐标系与与基座坐标系是平行关系。
六自由度的一般是
新生代的杜尔、ABB的编程和接口最简单,原生TCP坐标,但是很多客户用的是90年代日本的机器人,比如川崎、安川等。这里不对编程细节做解释,只讲讲一些基础的数学模型,便于机器人运动学开发工作。
1. 坐标变换
不管你用什么机器人,或是做计算机图形学的研究,都涉及到坐标变换问题。对于机器人编程来说,什么大地坐标系、机器人坐标系、工具坐标系、工件坐标系……其实他们在数学上可以看做一个位置矩阵不断的平移、旋转,而这个位置矩阵是由一个旋转矩阵和一个平移向量组成。在讲这个矩阵之前,我们先来看看什么是旋转矩阵:
旋转矩阵,是一个3*3的矩阵,从简单的数学上来看,一个点[Bx,By,Bz]我们绕x、y、z轴进行旋转,那么旋转后的位置[Ax,Ay,Az],可以写成:
Ax Bx
Ay = RotMatrix * By
Az Bz
而绕x,y,z旋转一个角度theta后,这个旋转矩阵可以写为:
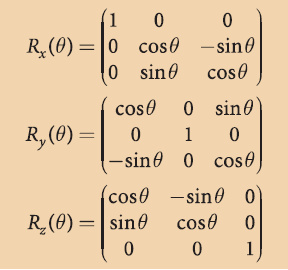
好了,上图这个矩阵是分量形式,通常一个点经过旋转都可以分解为在至少两个方向上进行三次旋转,而根据不同机器人的设计,有XYX,XZX,YXY,YZY,ZXZ,ZYZ等等形式。
比较有名的机器人比如杜尔采用ZYZ,安川采用ZYX。这种表示旋转的形式,通常称为欧拉角Euler angle,读者可以自行维基相关概念。当然也有使用四元数做旋转的,比如ABB。
不管哪种机器人在欧拉角和四元数上都有坑,为啥这么说呢,因为对于欧拉角你要搞清楚依次绕哪个轴进行旋转,对四元数你要搞清楚它是qw,qx,qy,qz还是qx,qy,qz,qw的排列顺序。
当然这里不讨论哪种方法表示角度更好,但是不管哪种方式,最清晰的旋转表示还是3*3的旋转矩阵。至于它怎么计算出来的,哈哈哈,乘一乘就好了呀。我刚接触机器人的时候,开始是很抵触看3*3矩阵的,但是后面的编程让我知道,如果想控制所有机器人,还是尽量用矩阵,因为用它做坐标变换和逆解实在是太方便了。
好了,上面提到坐标变换就是将旋转矩阵和一个平移向量组合。这里的计算方法就是
Ax Bx
Ay = [RotMatrix t * By
Az 0 1] Bz
1 1
t是一个1*3的列向量,将平移距离 x,y,z丢进去即可。
2. 机器人手臂运动学
机器人手臂可以理解为一些杆子绕着z轴旋转或伸缩,因此根据每个轴的链接方式,都可以写成一个坐标变换矩阵,这个矩阵的数学形式为:
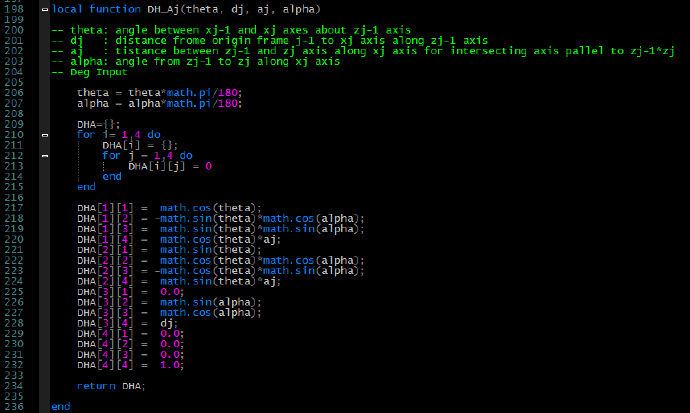
这就是著名的DH矩阵,对于旋转型手臂theta可变,对于平移型手臂dj可变。偷个懒,将我的LUA程序片段截了个屏,如果想研究更细致的,请维基和Youtube,讲的比较细,多看几遍就明白了。
3. 机器人正解
首先将各轴的DH矩阵相乘,然后得到的位置矩阵,前3*3表示旋转,后1*3表示平移后坐标。
4. 特殊机器人手臂
额,毕竟是自学的,可能对DH矩阵的偏移和轴角理解可能还是有偏差,当我遇到这种机器人手臂时,着实用了点精力去研究。
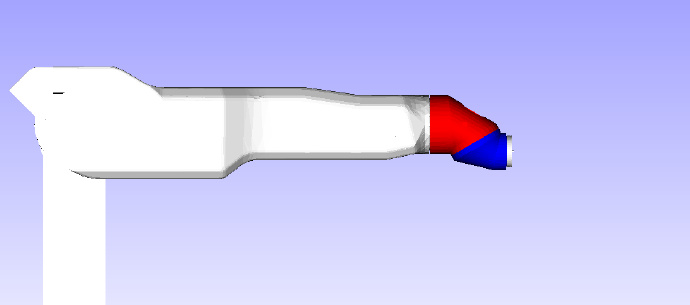
这个红蓝的两个机器手臂,不是典型的DH手臂,为啥这么说呢,因为不管你是用theta还是alpha进行转,单次都是无法完成坐标变换的,因此,在这段非典型的手臂,我又添加了两个辅助DH矩阵完成转置,经过转置后,坐标和姿态终于都对了。
5. 正解计算
其实对于绝大多数正解是不需要计算的,直接进行转译即可,但对于川崎机器人,它的坐标系需要参考传送带和机器人坐标系,机器人程序默认坐标是相对机器人的,但是它又引入传送带参考坐标,以控制其间的相对位置关系。此外,这里吐槽一下,小日本的机器人是左手坐标系,重审一遍是左手坐标系。
对于脉冲型机器人控制程序,需要将各轴旋转极限找出来,然后等差分配脉冲值和角度,这一点逻辑还是比较简单的,当然,组装机器人手臂及参考点还是比较烦人的。
此外还需要考虑是否要乘以工具坐标转换。
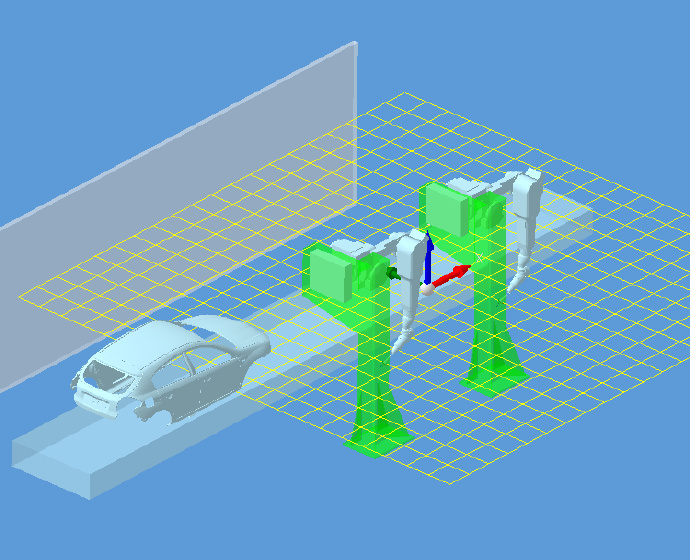
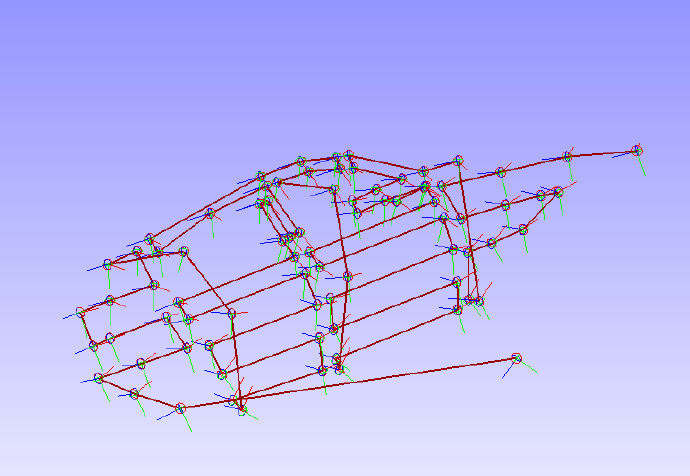
附图,川崎机器人转译后的机器人路径:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









