







一、相机选择
1.黑白or彩色:
同样分辨率的黑白的精度高,尤其是边缘检测。且灰度信息可以直接处理。
2.面阵or线阵:
线阵相机主要用于检测精度要求很高,运动速度很快的场景。面阵相机可以直接获取二维图像信息,测量图像直观。
面阵相机的分辨率是640*480是指相机横向有640个像元,纵向有480个像元;线阵相机分辨率只体现在横向,比如2048像素的线阵相机就是说横向有2048个像元,纵向大多数为1。
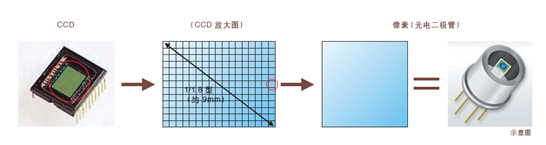
3.相机芯片CMOS和CCD:
CCD:将图像转换为电信号的半导体元器件,呈棋盘式排列的小像素组成。根据光的强度产生相应的电荷,电荷的大小读取为电信号,获得每个像素的光的强度。
o 灵敏度:CCD灵敏度好。
o 耗电量:CMOS耗电量小。
o 成本:CMOS成本低。
o 噪声:CCD噪声少。
o 分辨率:CCD的优秀。
结论:
目标静态不动且节约成本:CMOS
目标非高速运动:CMOS(采集速度快)
高质量图像(例如尺寸测量):CCD
4.接口选择
(1)USB接口:支持热拔热插、使用便捷、标准统一、可连接多个设备、相机可通过USB线缆供电。但没有标准的协议、主从结构,CPU占用率高、带宽没有保证。usb3.0的接口一般都是可以自供电。但是也可以再接一个电源,假如usb接口供电不稳定的话,那么就可以选择外接电源来进行供电。
(2)Gige千兆以太网接口:是一种基于千兆以太网通信协议开发的相机接口标准;适用于工业成像应用,通过网络传输无压缩视频信号;拓展性好,传输数据长度最长可伸展至100m(转播设备上可无限延长);带宽达1Gbit,因此大量的数据可即时得到传输; 可使用标准的NIC卡(或PC上已默认安装);经济性好,可使用廉价电缆(可使用通用的Ethernet电缆(CAT-6)和标准的连接器;可以很容易集成,且集成费用低;可管理维护性及广泛应用性。
(3)Camerlink接口: 是一种串行通讯协议。采用LVDS接口标准,具有速度快、抗干扰能力强、功耗低。从Channel link技术上发展而来的,在Channel link技术基础上增加了一些传输控制信号,并定义了一些相关传输标准。协议采用MDR-26针连接器。高速率,带宽可达6400Mbps、抗干扰能力强、功耗低。

Gige接口简单方便的进行多相机设置,支持100米线材输出。Camera Link接口是专门针对高速图像数据需求的标准接口。USB 3.0接口具有简单易用,实时性好的特点。目前在机器视觉中,应用最广泛的接口是Gige(以太网)接口,以太网接口在传输速度、距离、成本等方面较其他接口具有很大的优势。
5.分辨率选择
(1)确认所检测物体尺寸
(2)计算最小检测尺寸,选择合适的分辨率
B÷A×C
A=相机的拍摄范围的像素数(Y方向)(像素)
B=拍摄视野(Y方向)(mm)
C=拍摄元件的最小检测像素尺寸(像素),一般的 “4 像素角”。
例如:在30mm视野范围内,检测0.1mm物件。需要200万像素相机,(y方向像素1200,30÷1200×4=0.1mm)
(3)确认处理时间
相机的像素数越高分辨率越高,但是处理时间越长。拍摄传输时间:几ms-几十ms;图像处理:几ms-几百ms。

6.像元尺寸
像元尺寸指芯片像元阵列上每个像元的实际物理尺寸。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。
像元尺寸=传感器尺寸(CCD/CMOS)÷相机分辨率(像元个数)
7.像素深度
每位像素数据的位数,常见的是8bit,10bit,12bit。分辨率和像素深度共同决定了图像的大小。例如对于像素深度为8bit的500万像素,则整张图片应该有500万*8/1024/1024=37M(1024Byte=1KB,1024KB=1M)。增加像素深度可以增强测量的精度,但同时也降低了系统的速度,并且提高了系统集成的难度(线缆增加,尺寸变大等)。
8.精度
精度指一个像素表示实际物体的大小,精度值越小,精度越高。
单个像素对应的大小=视野宽/宽度分辨率 =视野高/高度分辨率
考虑到相机边缘视野的畸变以及系统的稳定性要求,一般不会只用一个像素单位对应一个测量精度值,有时候根据光源的不同会提高计算的值,使用背光源的精度为1-3个像素,使用正光源的精度为3-5个像素:
例如:使用500W像素相机 分辨率为25002000 视野为100mm80mm
单个像素对应大小 = 0.04mm
背光的精度为 0.04mm-0.12mm
正光的精度为 0.12mm-0.20mm
9.高速运动抓拍
应选择全局快门的工业相机,且需要选择帧率大于运动速度的工业相机。
(1)曝光时间
要满足物体运动速度Vp*曝光时间Ts<允许最长拖影S。运动速度比较快的物体拍照,为了防止长的拖影就需要极短的曝光时间,选用感光比较好的工业相机,可以实现。
(2)帧率指标
帧率即相机每秒钟可以捕捉的图像数量,一般决定于图像大小、曝光时间等。相机帧率必须保证能够拍摄到系统要求时间间隔最短的两张图片,处理图像的时间要在相机的曝光和传输的时间内完成,否则就有可能造成丢帧等现象,进而漏检某些产品。
二、镜头选择
1.确认检测对象工件的最大尺寸,过程中的位置偏离
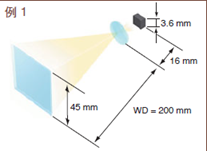
2.确认工作距离:
工作距离:视野 = 镜头焦距:CCD尺寸
3.弥散圆:
在焦点前后,光线开始聚集和扩散,点的影象变成模糊的,形成一个扩大的圆,这个圆就叫做弥散圆。容许弥散圆:如果弥散圆的直径小于人眼的鉴别能力,在一定范围内实际影象产生的模糊是不能辨认的。
4.景深(DOF,Depth of view):公式复杂,有在线景深计算器
在焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离就叫焦深,其对应在被摄主体(对焦点)前后,其影像仍然有一段清晰范围的,就是景深。
o 镜头焦距越小,景深越大。
o 与拍摄对象距离越远,景深越大。
o 光圈越小(光圈值越大、镜片的直径越小),景深越大。 使用延伸环或微距镜头时,景深会变小。
o 对于同一只镜头而言,光圈越小,亮度越大,越容易聚焦。

三、光源选择
1.根据检测元件选择打光方式:
(1)镜头接收的光线是来自拍摄对象的镜面反射光线,例如金属、玻璃这种容易反射的表面,正反射性
(2)避开来自拍摄对象的镜面反射光,而接收整体、均一的光线。例如光泽面,涂膜等,漫反射
(3)接收来自拍摄对象背景的光线。例如检测轮廓时,反射不太行了,用透过型背光灯
2.根据照明颜色选取:
波长短的蓝色扩散率高;波长长的红色不易扩散,透过率高,选取对比度明显的照明颜色。
想检测更细微的瑕疵时,蓝色适合。
不想受金属表面的纹路瑕疵等的影响时,红色适合。
















 3868
3868











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











