






udacity Markov定位程序,实现移动模式定位。python版本,根据网上的C++程序改写,方便大家参考。
参考代码:
(1)https://github.com/informramiz?page=5&tab=repositories
这个工程项目里有代码以及数据。感谢作者的无私分享。
参考文章:
(1)自动驾驶定位算法(九)-直方图滤波定位-腾讯云开发者社区-腾讯云
这篇文章对于理解Bayes滤波很有帮助。
参考公式:
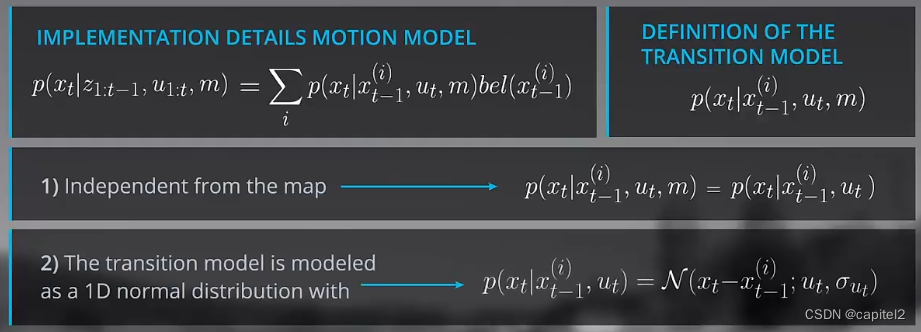
一、移动模式
本程序实现Markov定位中的移动模式。
二、车辆移动方式
车辆移动过程中,根据概率,车辆可以移动到任意到任意一个位置。
如下图示:

图1:车辆位置移动方式(1)
T+1时刻,车辆位置变化来源示意如下图示:

图2:车辆位置移动方式(2)
三、概率转移
已知T时刻车辆位置概率分布,如下图示:

图3:T时刻车辆位置概率分布
求T+1时刻,车辆移动后,车辆位置概率分布,如下图示:

图4:T+1时刻车辆位置概率分布(待求解)
四、卷积计算
T+1时刻,车辆位置概率由两部分决定,T时刻当前车辆位置概率,T+1时刻,车辆移动到下一个位置的转移概率;如下图示:
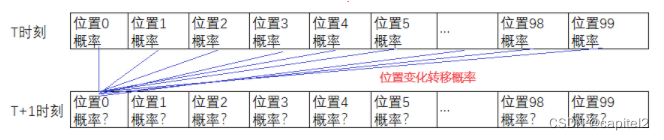
图5:T+1时刻车辆位置概率求解示意图
五、Markov定位程序-移动模式
import numpy as np
import matplotlib.pyplot as plt
import math
b_initialized = 0
map_1d = [[1,9],[2,15],[3,25],[4,31],[5,59],[6,77]] #index,xf
controls_delta_x_f = [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]
bel_x_init = np.zeros(100)
bel_x = np.zeros(100)
M_PI = 3.1415926
ONE_OVER_SQRT_2PI = 1 / np.sqrt(2 * M_PI)
control_std = 1.0
time = 0
def square(x):
return x * x
def normpdf(x, mu, std):
return (ONE_OVER_SQRT_2PI / std) * np.exp(-0.5 * square((x - mu) / std))
def process_measurement(delta_x_f):
global b_initialized
global bel_x_init
global bel_x
if(b_initialized == 0):
b_initialized = 1
for l in range(6):
landmark_temp = map_1d[l]
if(landmark_temp[1] > 0 and landmark_temp[1] < len(bel_x_init)):
position_x = landmark_temp[1]
bel_x_init[position_x] = 1.0
bel_x_init[position_x - 1] = 1.0
bel_x_init[position_x + 1] = 1.0
#normalize bel_x_init
sum = np.sum(bel_x_init)
bel_x_init = bel_x_init / sum
for i in range(len(bel_x)):
pos_i = float(i)
posterior_motion = 0.0
for j in range(len(bel_x)):
pos_j = float(j)
distance_ij = pos_i - pos_j
transition_prob = normpdf(distance_ij, delta_x_f, control_std)
posterior_motion = posterior_motion + transition_prob * bel_x_init[j]
bel_x[i] = posterior_motion
#normalize bel_x
sum = np.sum(bel_x)
bel_x = bel_x / sum
bel_x_init = bel_x.copy()
def display_map(grid, bar_width=1):
if(len(grid) > 0):
x_labels = range(len(grid))
plt.bar(x_labels, height=grid, width=bar_width-0.2, color='b')
plt.xlabel('Grid Cell')
plt.ylabel('Probability')
plt.ylim(0, 1) # range of 0-1 for probability values
plt.title('Probability of the robot being at each cell in the grid')
plt.xticks(np.arange(min(x_labels), max(x_labels)+1, 3))
plt.show()
else:
print('Grid is empty')
if __name__ == '__main__':
for t in range(len(controls_delta_x_f)):
time = t
process_measurement(controls_delta_x_f[t])
display_map(bel_x)
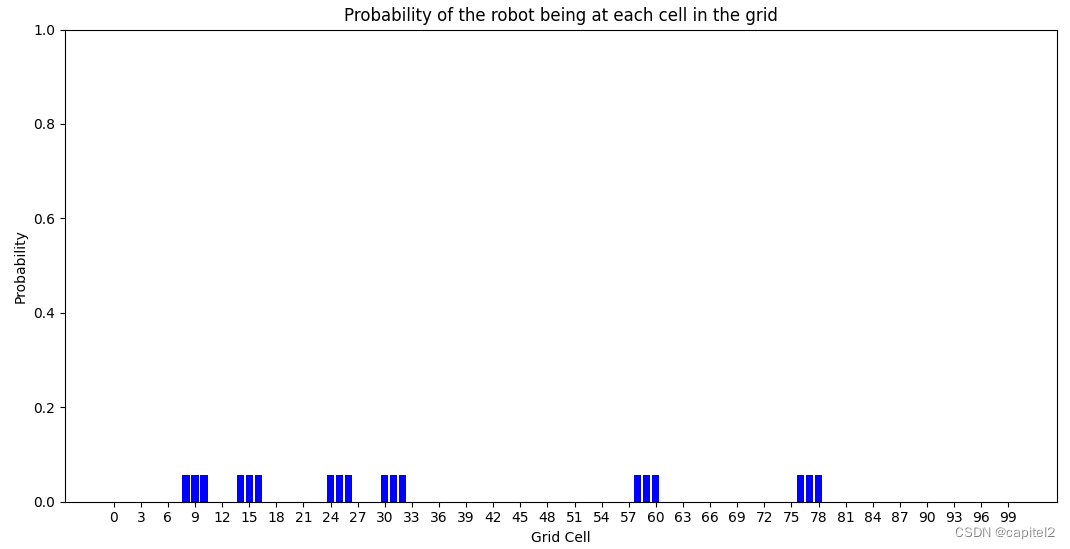
六、结果展示
(1)初始概率分布
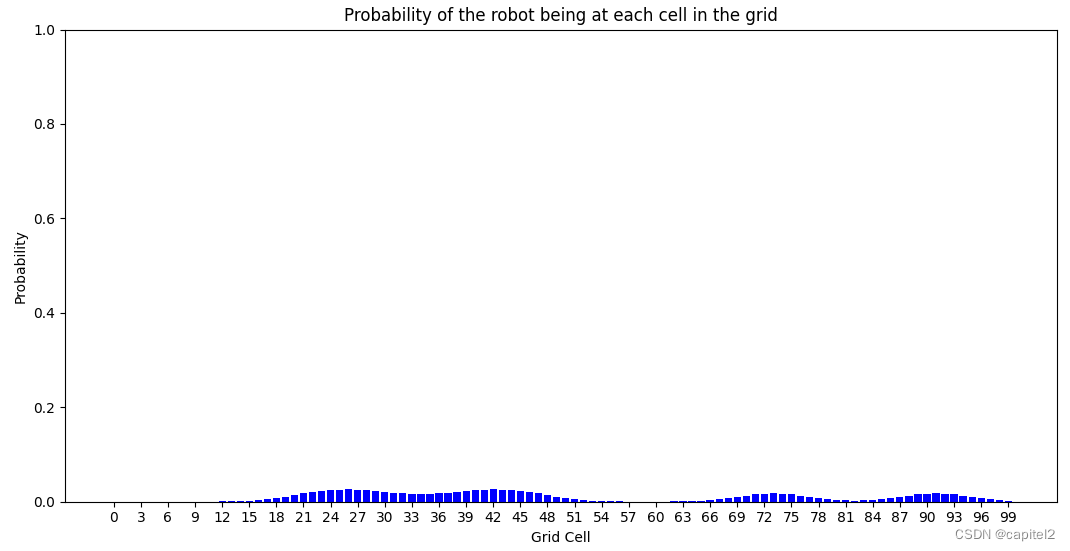
(2)移动14次后,车辆位置概率分布















 1093
1093











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









