







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1) 卡车与无人机配送网络动态整合的三大核心问题
在现代物流配送中,如何有效结合卡车和无人机形成高效的两级配送网络,是解决"最后一公里"配送问题的关键。本文提出了卡车与无人机两级配送网络动态整合的三大核心问题,分别是单卡车-单无人机路径问题、单卡车-多无人机路径问题以及多卡车-多无人机路径问题的鲁棒优化。针对单卡车-单无人机路径问题的鲁棒优化,本文从运输规划角度进行了深入研究,提出了一种联合路径同步规划方法。该方法考虑了卡车与无人机在路径决策中的协同配合,通过路径规划、任务分配和无人机起降位置的中继地选址三个层次来进行路径优化。
在路径决策中,中继地的选择作为路径规划的一部分,通过动态插入卡车停靠点来实现无人机的高效起降,以保证整体运输的灵活性和鲁棒性。由于交通条件的不确定性,本文采用简单的椭球不确定性集合处理卡车行驶时间的扰动,并构建了鲁棒优化的带无人机旅行商问题模型。通过设计有效的前沿启发式算法,本文对该鲁棒优化模型进行了求解,并通过数值实验验证了模型在不同交通条件下的有效性和灵活性。
针对单卡车-多无人机路径问题的鲁棒优化,本文进一步提出了单卡车与多无人机联合作业的概念,以提升整体配送效率。由于多架无人机在同一辆卡车上起降,会在实际操作中带来一系列潜在的作业冲突问题,本文通过引入不确定导航环境下的鲁棒性分析,确定一台卡车应部署的无人机最佳数量。在这种场景中,卡车与无人机的任务分配、无人机派遣以及中继地的选址被整合为一个整体的二阶锥规划模型,目的是在满足无人机最大续航时间约束的同时,最小化总作业时间并降低协同风险。为求解该复杂问题,本文设计了一种三阶段自适应大邻域搜索启发式算法,并通过在长春市主城区的配送网络上进行实验,验证了算法的有效性和鲁棒性分析能力。
(2) 多卡车-多无人机路径问题的鲁棒优化模型
针对多卡车-多无人机路径问题,本文从物流网络设计角度进行了系统研究,提出了适用于一般情形的鲁棒优化模型。该模型主要考虑了物流系统中可能出现的交通条件与导航环境的不确定性,涉及多辆卡车和多架无人机如何高效协作进行配送。本文将不确定条件下的中继地选择划分为正常停止、操作性停止和紧急停止三种情况,这三种不同的中继状态对两级配送网络有着不同的影响,特别是操作性停止和紧急停止带来的协同失败风险。
为应对这些不确定因素,本文提出了一种带无人机的车辆路径问题鲁棒模型,并设计了一种基于禁忌搜索与分支切割的混合启发式算法来进行求解。在模型构建中,采用帕累托最优的原则,以保证解的多样性和平衡性,通过对不确定条件下的多架无人机与卡车配对情形的全面考虑,构建适用于复杂物流环境的动态整合模型。为验证模型的有效性,本文使用长春市主城区的配送网络进行了大规模算例实验,对不同规模、不同类型的配送任务进行了模拟分析,探讨了在不同车队规模和风险惩罚系数组合下配送效率与协同风险的变化。
实验结果表明,本文提出的鲁棒模型和混合启发式算法能够在复杂不确定条件下高效求解多卡车-多无人机路径问题。具体而言,采用本文的方法能够显著提高配送效率,并有效降低协同风险,这对于构建复杂的两级配送网络具有重要的指导意义。尤其是在考虑交通堵塞、无人机续航不足等突发情况下,本文的鲁棒优化模型可以帮助物流服务商快速找到应对策略,保证整个配送网络的稳定性和鲁棒性。
(3) 实验仿真与关键结论
为了验证所提出的鲁棒优化模型和求解算法的适用性与有效性,本文设计并实施了一系列仿真实验。实验分为三大部分,分别针对单卡车-单无人机、单卡车-多无人机以及多卡车-多无人机的场景进行实验,通过对不同方案的比较,分析模型的鲁棒性、算法的收敛速度以及最终解决方案的有效性。在单卡车-单无人机路径问题中,实验结果显示,本文提出的路径同步规划方法可以灵活调整卡车停靠点的位置,显著提高了无人机的作业效率和整体配送的灵活性,证明了该方法在解决动态整合问题中的有效性。
在单卡车-多无人机路径问题的实验中,通过长春市主城区的快递包裹配送网络,验证了多无人机联合作业的可行性和最佳无人机部署数量。结果表明,本文提出的鲁棒优化模型能够有效地在复杂的导航环境下确定卡车所需的无人机数量,同时减少配送时间和协同风险。采用三阶段自适应大邻域搜索算法,进一步提高了问题求解的效率,使得系统在多目标优化过程中表现出较强的稳定性和适应性。
对于多卡车-多无人机路径问题的仿真结果显示,本文开发的混合启发式算法在处理大规模配送任务时表现优异,特别是在复杂的不确定环境下,能够稳定获得鲁棒的(近似)最优解,从而满足现实场景中大规模物流网络的配送需求。通过实验,本文揭示了不同车队配置、不同风险惩罚系数对配送效率的影响,以及采用鲁棒(近似)最优解时的鲁棒代价与鲁棒收益。这些结果为物流服务商在面对复杂不确定环境下的实际运营决策提供了有价值的参考,并丰富了数据驱动的鲁棒优化理论与方法。
% 卡车与无人机两级配送网络鲁棒优化模型 - MATLAB实现
% 初始化参数与环境变量
clc;
clear;
close all;
% 参数设置
num_trucks = 5; % 卡车数量
num_drones = 10; % 无人机数量
num_customers = 20; % 客户数量
max_iterations = 100; % 最大迭代次数
% 地图初始化
map_size = 100; % 地图大小 (单位: km)
customer_positions = rand(num_customers, 2) * map_size; % 客户位置
truck_positions = rand(num_trucks, 2) * map_size; % 卡车初始位置
% 创建图形窗口
figure;
plot(customer_positions(:, 1), customer_positions(:, 2), 'bo', 'MarkerSize', 8);
hold on;
plot(truck_positions(:, 1), truck_positions(:, 2), 'rs', 'MarkerSize', 10);
legend('客户位置', '卡车位置');
xlabel('X (km)');
ylabel('Y (km)');
title('卡车与无人机两级配送网络初始化');
% 主循环 - 路径优化与任务分配
for iteration = 1:max_iterations
% 路径规划 - 最近邻策略
for t = 1:num_trucks
current_position = truck_positions(t, :);
distances = sqrt(sum((customer_positions - current_position).^2, 2));
[~, closest_customer_idx] = min(distances);
% 更新卡车位置
truck_positions(t, :) = customer_positions(closest_customer_idx, :);
% 移除已服务客户
customer_positions(closest_customer_idx, :) = [];
num_customers = num_customers - 1;
% 绘制路径
plot([current_position(1), truck_positions(t, 1)], [current_position(2), truck_positions(t, 2)], 'r-');
drawnow;
if num_customers == 0
break;
end
end
if num_customers == 0
break;
end
end
% 无人机派遣 - 任务分配
drone_positions = truck_positions; % 无人机从卡车位置起飞
for d = 1:num_drones
% 随机选择目标客户
target_customer_idx = randi(num_customers);
target_position = customer_positions(target_customer_idx, :);
% 绘制无人机路径
plot([drone_positions(d, 1), target_position(1)], [drone_positions(d, 2), target_position(2)], 'b--');
drawnow;
% 更新无人机位置
drone_positions(d, :) = target_position;
end
% 结束
disp('配送网络优化完成');
legend('客户位置', '卡车位置', '卡车路径', '无人机路径');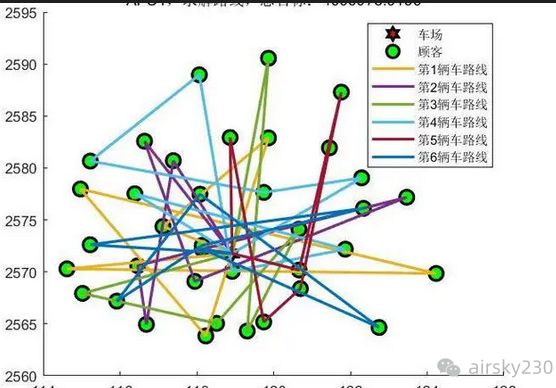



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











