







实验说明
1:采用三个ADC采集同一个IO口(通道12 PC2),采用一个ADC去采集最快速率2.4M,三个同时交替采集最高可达7.2M
2:三重是以ADC1占主导的,我们只要开启ADC1的DMA就可以了,
3:实验现象

HAL库配置
 三个ADC都配置成这样
三个ADC都配置成这样

1:三通道交替采集模式
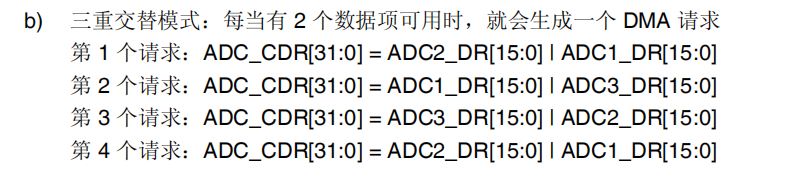
2:DMA使用模式2
3:两次采样之间的等待周期,采样间隔
只需要开启ADC1的DMA2就可以了(有个字 32bit),具体模式说明在中文参考手册中的多重ADC模式里面有

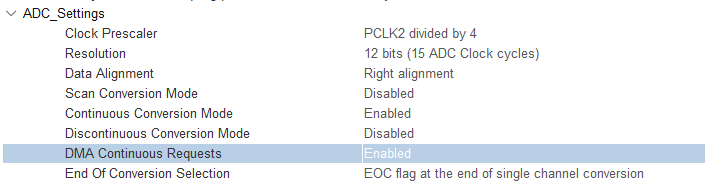
1:扫描模式:只使用一个通道,所以扫描模式不用打开
2:使能连续采样
3:要前面先开启DMA,这里才能使能

规则通道配置
1:规则通道数:只开了一个通道,选1就行了
2:软件触发模式

代码分析
ADC_HandleTypeDef hadc1;
ADC_HandleTypeDef hadc2;
ADC_HandleTypeDef hadc3;
DMA_HandleTypeDef hdma_adc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_MultiModeTypeDef multimode = {0};
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = ENABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure the ADC multi-mode
*/
multimode.Mode = ADC_TRIPLEMODE_INTERL;
multimode.DMAAccessMode = ADC_DMAACCESSMODE_2;
multimode.TwoSamplingDelay = ADC_TWOSAMPLINGDELAY_6CYCLES;
if (HAL_ADCEx_MultiModeConfigChannel(&hadc1, &multimode) != HAL_OK)
{
Error_Handler();
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_12;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/* ADC2 init function */
void MX_ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.ScanConvMode = DISABLE;
hadc2.Init.ContinuousConvMode = ENABLE;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.NbrOfConversion = 1;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_12;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
/* ADC3 init function */
void MX_ADC3_Init(void)
{
/* USER CODE BEGIN ADC3_Init 0 */
/* USER CODE END ADC3_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC3_Init 1 */
/* USER CODE END ADC3_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc3.Instance = ADC3;
hadc3.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc3.Init.Resolution = ADC_RESOLUTION_12B;
hadc3.Init.ScanConvMode = DISABLE;
hadc3.Init.ContinuousConvMode = ENABLE;
hadc3.Init.DiscontinuousConvMode = DISABLE;
hadc3.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc3.Init.NbrOfConversion = 1;
hadc3.Init.DMAContinuousRequests = DISABLE;
hadc3.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc3) != HAL_OK)
{
Error_Handler();
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_12;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc3, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC3_Init 2 */
/* USER CODE END ADC3_Init 2 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* ADC1 clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**ADC1 GPIO Configuration
PC2 ------> ADC1_IN12
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* ADC1 DMA Init */
/* ADC1 Init */
hdma_adc1.Instance = DMA2_Stream0;
hdma_adc1.Init.Channel = DMA_CHANNEL_0;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_LOW;
hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_adc1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
else if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspInit 0 */
/* USER CODE END ADC2_MspInit 0 */
/* ADC2 clock enable */
__HAL_RCC_ADC2_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**ADC2 GPIO Configuration
PC2 ------> ADC2_IN12
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* USER CODE BEGIN ADC2_MspInit 1 */
/* USER CODE END ADC2_MspInit 1 */
}
else if(adcHandle->Instance==ADC3)
{
/* USER CODE BEGIN ADC3_MspInit 0 */
/* USER CODE END ADC3_MspInit 0 */
/* ADC3 clock enable */
__HAL_RCC_ADC3_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**ADC3 GPIO Configuration
PC2 ------> ADC3_IN12
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* USER CODE BEGIN ADC3_MspInit 1 */
/* USER CODE END ADC3_MspInit 1 */
}
}
DMA文件里面就开启时钟和配置中断
void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA2_CLK_ENABLE();
/* DMA interrupt init */
/* DMA2_Stream0_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream0_IRQn);
}
usart中printf重定向
/***************** 发送字符串 **********************/
void Usart_SendString(uint8_t *str)
{
unsigned int k=0;
do
{
HAL_UART_Transmit(&huart1,(uint8_t *)(str + k) ,1,1000);
k++;
} while(*(str + k)!='\0');
}
///重定向c库函数printf到串口DEBUG_USART,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口DEBUG_USART */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 1000);
return (ch);
}
///重定向c库函数scanf到串口DEBUG_USART,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
int ch;
HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, 1000);
return (ch);
}
主函数
uint32_t ADC123_Buff[3000]={0};//定义一个数组,用来保存采样后的数据,定义很小的话,就会频繁进入DMA的中断处理函数,CPU就会大部分时间花在中断切换上面,10K左右
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_ADC2_Init();
MX_ADC3_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_ADC_Start(&hadc3);//前面只是初始化,还要开启。开启的顺序要这样,不然会报错
HAL_ADC_Start(&hadc2);
HAL_ADCEx_MultiModeStart_DMA(&hadc1,(uint32_t *)ADC123_Buff,3000);//传输的大小最好是3的倍数,开启了DMA和ADC
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//ADC1
printf ("ADC1_L: %f V \r\n",(float)(uint16_t)ADC123_Buff[0]*(3.3/4096));//把32位强转换成16位的话,只保存低16位,高16位的会被舍弃
//ADC2
printf ("ADC2_H: %f V \r\n",(float)(ADC123_Buff[0]>>16)*(3.3/4096));
//ADC3
printf ("ADC3_L: %f V \r\n",(float)(uint16_t)ADC123_Buff[1]*(3.3/4096));
//ADC1
printf ("ADC1_H: %f V \r\n",(float)(ADC123_Buff[1]>>16)*(3.3/4096));
//ADC2
printf ("ADC2_L: %f V \r\n",(float)(uint16_t)ADC123_Buff[2]*(3.3/4096));
//ADC3
printf ("ADC3_H: %f V \r\n",(float)(ADC123_Buff[2]>>16)*(3.3/4096));
printf("\r\n");
HAL_Delay(500);
}
/* USER CODE END 3 */
}

















 6384
6384











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











