






4.1编译程序包
由于我们是通过apt-get的方式下载安装ros,所以默认下载安装好依赖包
在此之前,确保已经source /opt/ros/indigo/setup.bash
4.2使用catkin_make
(这句话后部分不懂也不用管)catkin_make是一个命令行工具,就是简化CMake标准工作流程中依次调用cmake和make
在catkin的工作区间里(我们这里是~/catkin_ws),直接输入catkin_make即可。由于我们之前创建了一个beginner_tutorials的catkin程序包,会输出一对cmake和make的信息,像这样
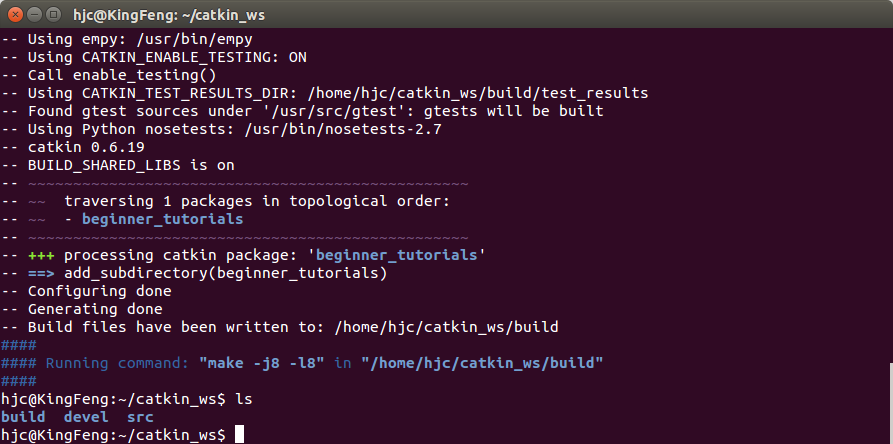
这就编译好了。
如果在工作区间里,不是使用默认的src,比如自己创建了个my_src,编译的方式是
catkin_make --source my_src还有个不知道是干啥的,后期理解后补上
catkin_make install --source my_src















 4629
4629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









