








 本文介绍如何使用pointcloud_to_laserscan工具将点云数据转换为激光雷达数据,并展示了具体的步骤,包括源码下载、编译及配置等。此外,还提供了使用RViz查看结果的方法以及如何通过rqt_graph检查节点间的通信状态。
本文介绍如何使用pointcloud_to_laserscan工具将点云数据转换为激光雷达数据,并展示了具体的步骤,包括源码下载、编译及配置等。此外,还提供了使用RViz查看结果的方法以及如何通过rqt_graph检查节点间的通信状态。
准备
- 对于ros和openni2的准备看我上一篇的日志
- 下载源码,pointcloud_to_laserscan:https://github.com/ros-perception/pointcloud_to_laserscan
- 编译源码
- 打开源码launch下面的sample_node.launch文件(当然是
roslaunch ../sample_node.launch)
过程
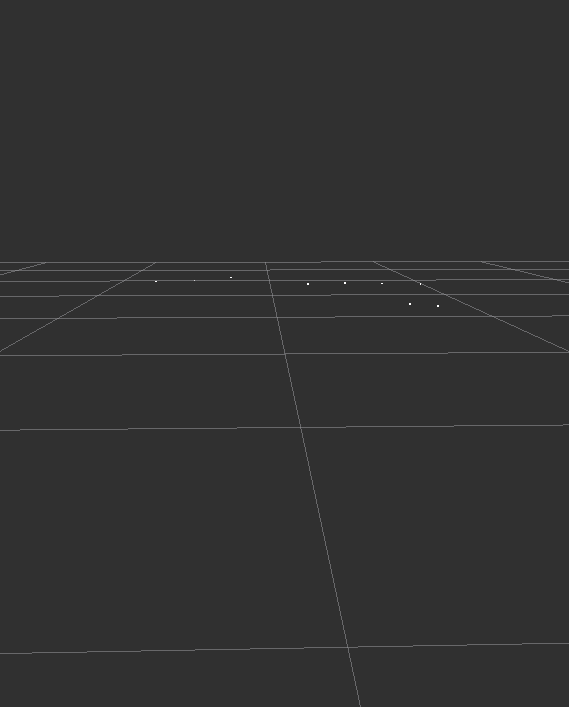
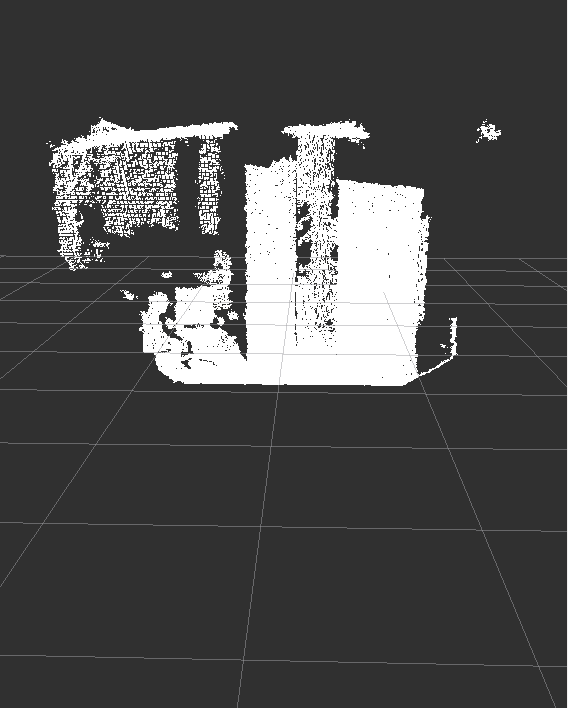
使用rviz来观看执行结果
rosrun rviz rviz
激光数据
点云数据
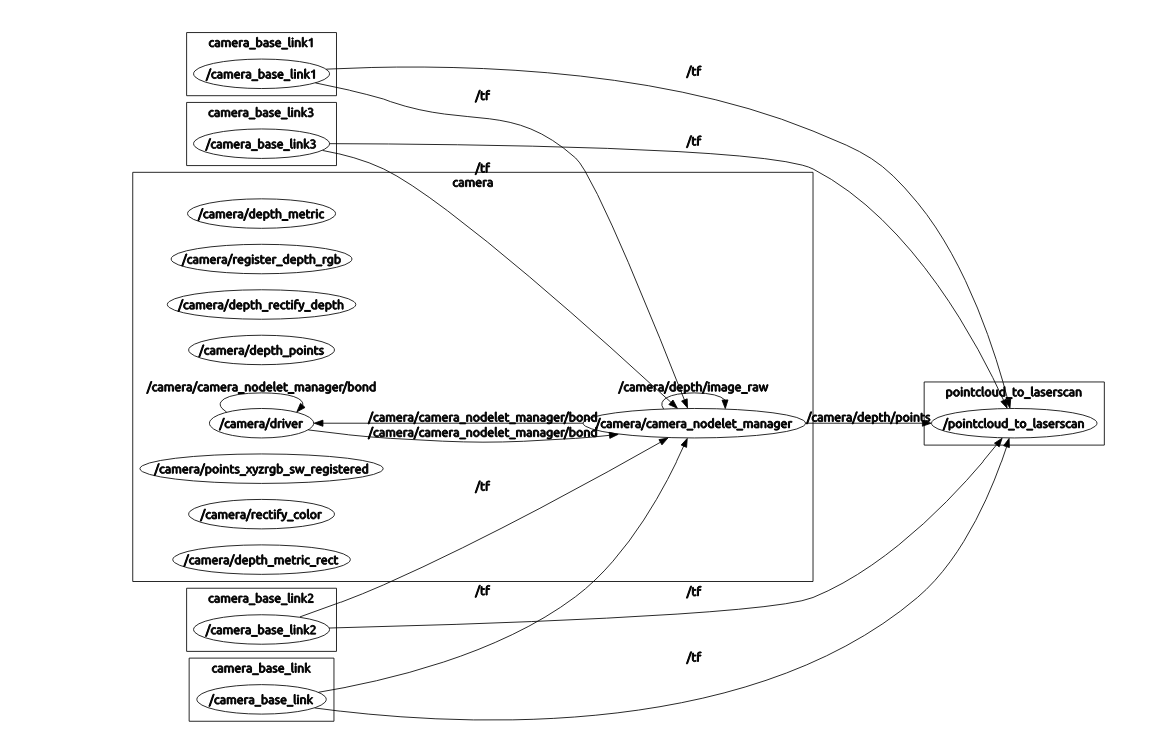
使用rqt_graph来看ros的节点通讯状况
rosrun rqt_graph rqt_graph
- 我的pointcloud2是订阅自/camera/depth/points主题,大家可以根据自己的情况修改launch文件的remap语句
- ps:
export ROS_PACKAGE_PATH=/home/ORB_SLAM:$ROS_PACKAGE_PATH这个语句将ros源程序包加入ros的path - 下一步是用激光数据来构建地图,之后将要上线,敬请期待~~(我的激光数据主题是/camera/scan)
你也可以从我的github上直接下载代码来用,里面的launch文件已经改成了适合我自己电脑的:
pointcloud_to_laserscan


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









