




 本文详细介绍ROS导航系统的核心组件move_base及其相关配置。包括laserandodom、map_server、costmap等节点的功能及参数设置,特别关注costmap在路径规划中的作用。
本文详细介绍ROS导航系统的核心组件move_base及其相关配置。包括laserandodom、map_server、costmap等节点的功能及参数设置,特别关注costmap在路径规划中的作用。
前言
前文已经讲过gmapping构建地图和amcl自定位了,下面就可以将这些整合到move_base中正式开启导航模式了~
move_base简介
move_base节点其实相当于ros navigation整体框架的一个指挥官,它统筹了各个navigation节点发过来的信息:
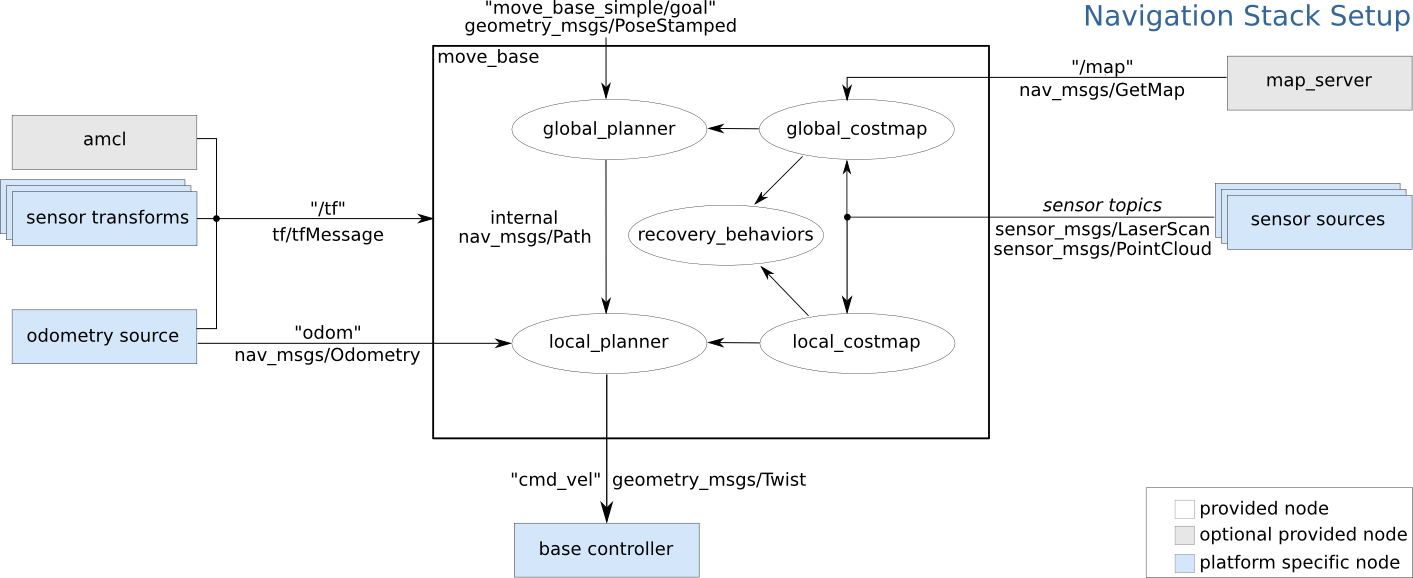
下面我介绍一下我了解的节点:
laser and odom
正如gmapping和amcl一样,laser和odometry信息依然是要作为输入的。当然这里增加了一个pointcloud点云信息可以去做障碍物检测,不过博主并没有用过~~
map_server
这个节点是用来读入生成好的地图的~一般gmapping生成的一个.pgm的地图直接使用map_server读进去就可以了。
costmap
这个节点困扰了我好久,其中local_costmap一直都没有数据。后来才发现是障碍物高度范围的参数设的太小,调大之后终于成功了。costmap我理解就是在原来的地图基础上,结合一些膨胀(使原地图更胖)和sensor(我的是laser)的数据,形成一个新的地图,然后在这个地图上进行路径规划。这里global costmap是不动的,只是基于读入的地图,而local costmap是实时更新的,根据你的激光数据,它可以帮你躲避新出现在地图中的障碍物。
planner
进行路径规划的节点。
base_control
输出规划好的速度,可以直接订阅然后下发给你的机器人。不过我的cmd_vel主题老是会输出0的速度,所以大家根据情况可以对速度进行一些限制和优化。
我的launch文件
<?xml version="1.0"?>
<launch>
<node pkg="beginner_tutorials" type="talker" name="talker"/>
<node pkg="map_server" type="map_server" name="map_server" args="/home/nj/laser_map/map3.yaml"/>
<!-- amcl node -->
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<remap from="scan" to="scan"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="use_map_topic" value="true"/>
<param name="odom_model_type" value="omni"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.5" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="100"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.1"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.1"/>
<param name="odom_alpha2" value="0.1"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.1"/>
<param name="odom_alpha4" value="0.1"/>
<param name="laser_z_hit" value="0.9"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_min_range" value="1"/>
<param name="laser_max_range" value="5"/>
<param name="laser_likelihood_max_dist" value="4.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<param name="initial_pose_x" value="3"/>
<param name="initial_pose_y" value="-1"/>
<param name="initial_pose_a" value="0"/>
<param name="initial_cov_xx" value="15"/>
<param name="initial_cov_aa" value="15"/>
<param name="initial_cov_yy" value="15"/>
</node>
<node pkg="move_base" type="move_base" name="move_base" output="screen">
<rosparam file="/home/nj/laser_map/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="/home/nj/laser_map/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/nj/laser_map/local_costmap_params.yaml" command="load" />
<rosparam file="/home/nj/laser_map/global_costmap_params.yaml" command="load" />
<rosparam file="/home/nj/laser_map/dwa_local_planner_params.yaml" command="load" />
</node>
</launch>我的talker节点是激光节点,大家可以吧这个节点换成自己的激光节点。
我这里对move_base设置参数使用了yaml文件,因为参数太多了写到一个launch会死的~~
我已经传到github上了,这些文件链接:github,当然大家需要改一下路径~
重要参数(2015 12 25增补)
我把我觉得重要的参数都给大家列举一下:
costmap_common_params.yaml
基本的重要参数都在这个参数表里
1. obstacle_range:决定了多远的距离以内被当成是障碍显示在local costmap里面
2. footprint: 通过设置坐标来决定了你小车的形状,也可以设置radius,小车就是圆形。
3. inflation_radius:costmap的膨胀半径~很重要~
4. observation_sources:用来设置你输入的障碍物检测方法:可以是激光和点云
5. max_obstacle_height: , min_obstacle_height: ,障碍物的高度范围,我就是这个范围设的太小开始local map并没有显示出来。
我的结果图
在rviz中显示出的效果
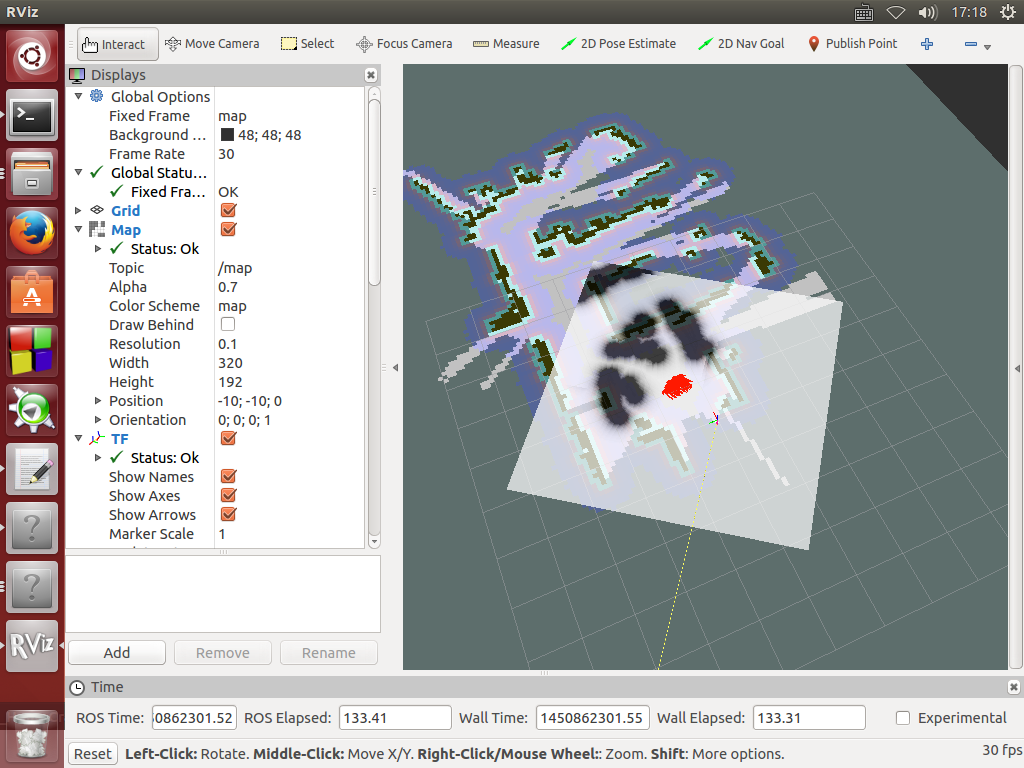
白色方块就是local costmap了,而原地图旁边的各种颜色就是对地图的膨胀,这个参数都是可以在yaml文件里设置的。
ros costmap,这个链接就是ros介绍costmap的参数如何设定大家也可以找到。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









