







五、三维重建与 OpenGL 显示
.
在获取到视差数据后,利用 OpenCV 的 reProjectImageTo3D 函数结合 Bouquet 校正方法得到的 Q 矩阵就可以得到环境的三维坐标数据,然后利用 OpenGL 来实现三维重构。 OpenCV 与 OpenGL 的编程范例,我在 学习笔记( 15 ) 中有详细的讨论,这里就不重复了,下面补充一些细节问题:
.
.
1. reProjectImageTo3D 是怎样计算出三维坐标数据的?
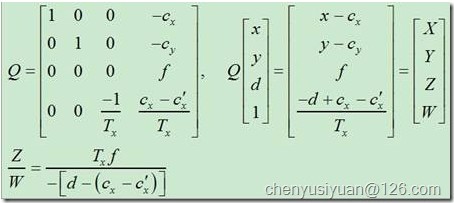
图 22
.
相信看过 OpenCV 第 12 章的朋友对上图中的 Q 矩阵不会陌生,根据以上变换公式,按理说 OpenCV 应该也是通过矩阵运算的方式来计算出三维坐标数据的,但实际上仔细查看源代码,会发现 cvReprojectImageTo3D 用了比较奇怪的方法来实现,主要代码如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1416
1416











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









