







 本文介绍如何使用Raspberry Pi3主板和一系列组件,包括PS2操纵杆模块、PCF8591模数转换器等,实现对PS2操纵杆的控制和读取。通过树莓派编程,实验能够检测操纵杆的方向和按钮状态,适用于游戏和机器人控制应用。
本文介绍如何使用Raspberry Pi3主板和一系列组件,包括PS2操纵杆模块、PCF8591模数转换器等,实现对PS2操纵杆的控制和读取。通过树莓派编程,实验能够检测操纵杆的方向和按钮状态,适用于游戏和机器人控制应用。
一、介绍
操纵杆是一种输入设备,由一根可在基座上旋转,并向其控制的设备报告其角度或方向的操纵杆组成。操纵杆通常用于控制视频游戏和机器人。这里使用操纵杆PS2。
二、组件
★Raspberry Pi 3主板*1
★树莓派电源*1
★40P软排线*1
★PCF8591模数转换器模块*1
★PS2操纵杆模块*1
★双色LED模块*1
★面包板*1
★跳线若干
三、实验原理
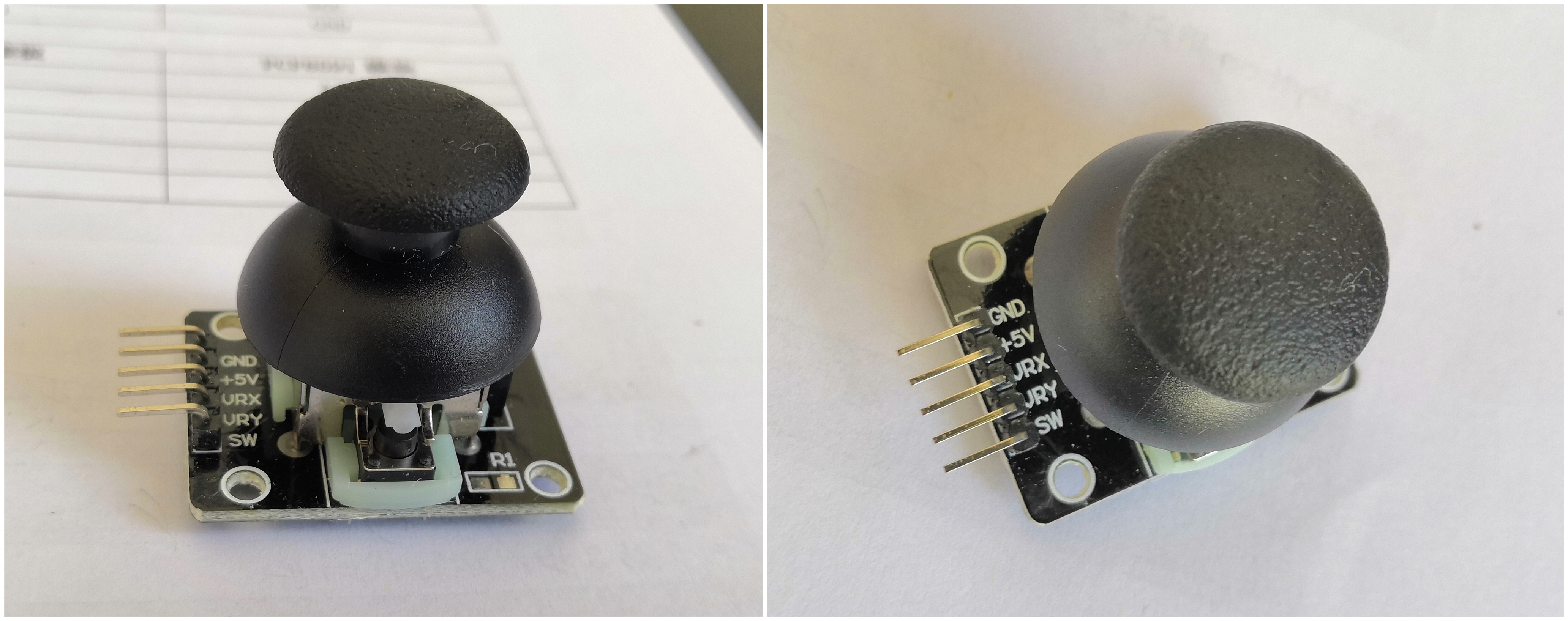
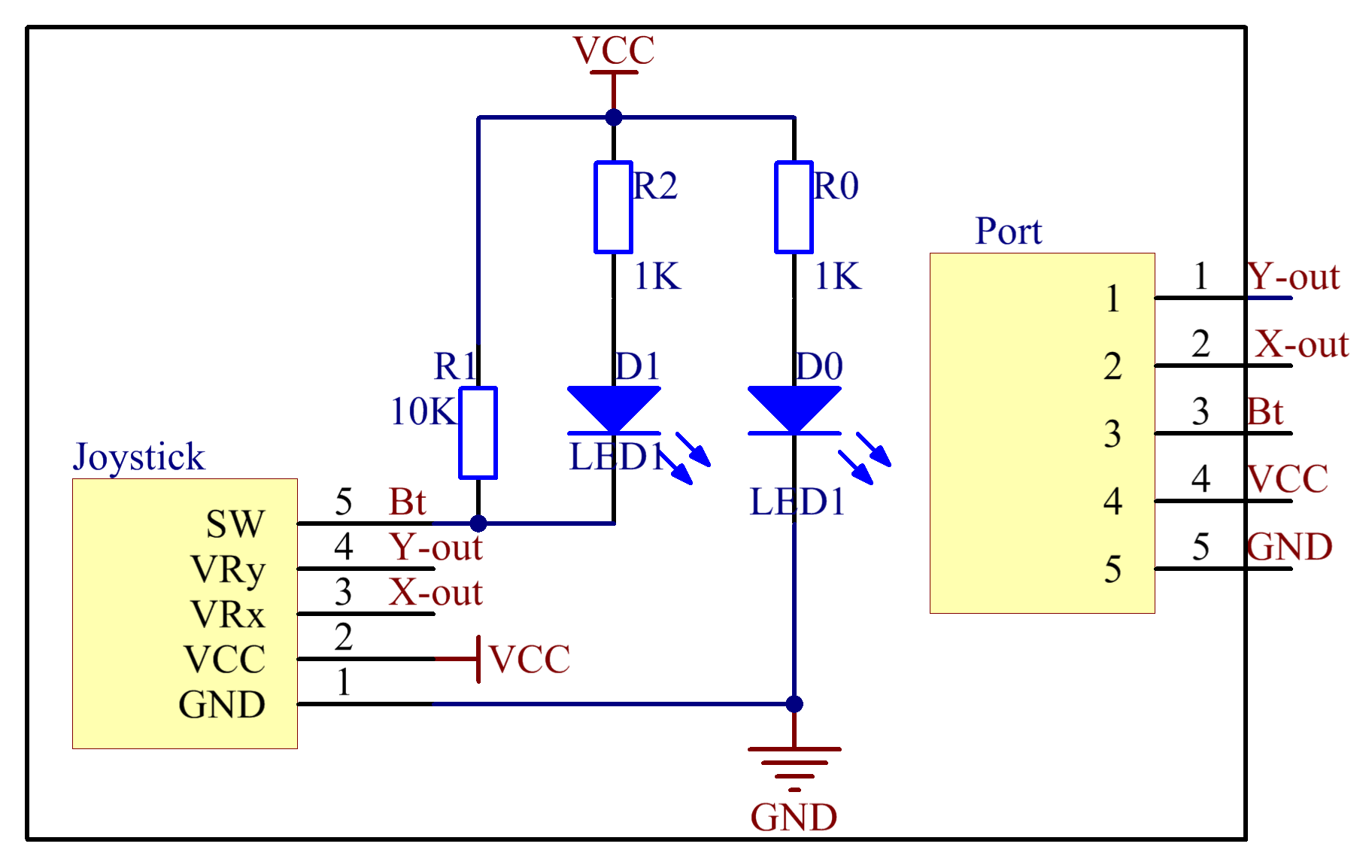
该模块有由两个模拟输出(对应x和y坐标)和一个数字输出,表示是否在Z轴上按下。
在本实验中,我们将引脚VRx和VRy连接到A/D转换器的模拟输入端口,以便将模拟量转换为数字量。然后在树莓派上编程,以检测操纵杆的移动方向。
实验使用的双轴按键摇杆控制器,十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。本模块使用5V供电,原始状态下X,Y读出电压为2.5V左右,当随箭头方向按下,读出电压值随着增加,最大到5V;箭头相反方向按下,读出电压值减少,最小为0V,即模块特设二路模拟输出和一路数字输出接口,输出值分别对应(X,Y)双轴偏移量,其类型为模拟量;按键表示用户是否在ž轴上按下,类型其为数字。开关量坐标标识符清晰简明,准确定位;用其可以轻松控制物体(如二自由度舵机云台)在二维空间运动。
四、实验步骤
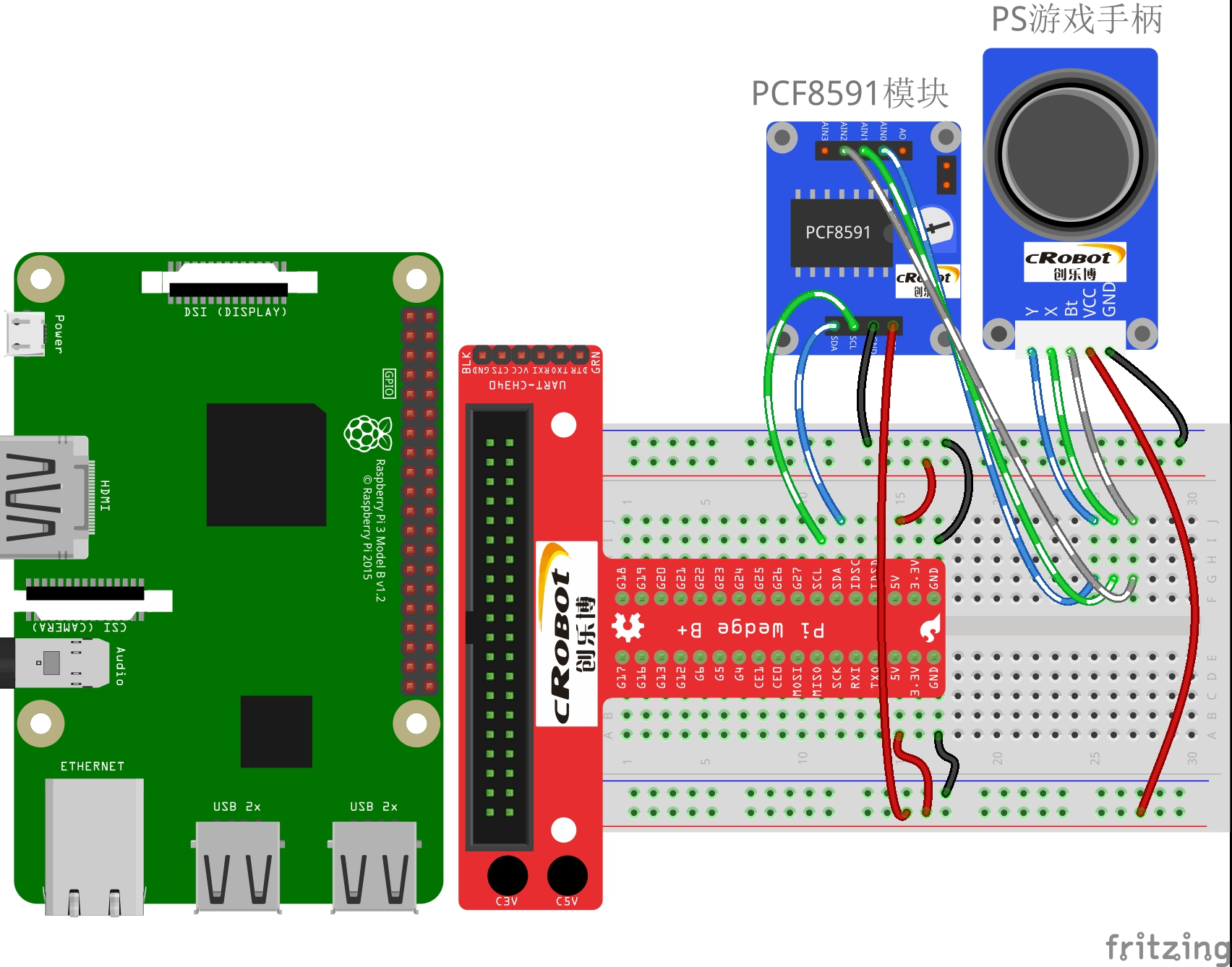
第1步: 连接电路。
| 树莓派 | T型转接板 | PCF8591模块 |
|---|---|---|
| SDA | SDA | SDA |
| SCL | SCL | SCL |
| 5V | 5V | VCC |
| GND | GND | GND |
| PS2操纵杆模块 | T型转接板 | PCF8591模块 |
|---|---|---|
| VRx | * | AIN1 |
| VRy | * | AIN0 |
| SW(按钮) | * | AIN2 |
| VCC | 5V | VCC |
| GND | GND | GND |
第2步: PCF8591模块采用的是I2C(IIC)总线进行通信的,但是在树莓派的镜像中默认是关闭的,在使用该传感器的时候,我们必须首先允许IIC总线通信。

第3步: 开始编程。这里先编写一个PCF8591.py库文件,后面再编写一个python程序引入这个库文件。
PCF8591.py库文件就是PCF8591模块的程序,单独编写是为了便于重用。在这个脚本中,我们使用了一个放大器用于模拟输入和一个LED灯用于模拟输出,模拟输入不能超过3.3V!
该程序也可以单独运行,用于测试3个电阻模块的功能。需用短路帽连接AIN0和INPUT0(电位计模块),连接AIN1和INPUT1(光敏电阻模块),以及连接AIN2和INPUT2(热敏电阻模块)。
连接LED灯,AIN0(模拟输入0)端口用于接收来自电位计模块的模拟信号,AOUT(模拟输出)用于将模拟信号输出到双色LED模块,以便改变LED的亮度。
PCF8591的详细内容请查看树莓派基础实验12:PCF8591模数转换器实验。
#!/usr/bin/env python
#------------------------------------------------------
#
# 您可以使用下面语句将此脚本导入另一个脚本:
# “import PCF8591 as ADC”
#
# ADC.Setup(Address) # 查询PCF8591的地址:“sudo i2cdetect -y 1”
# i2cdetect is a userspace program to scan an I2C bus for devices.
# It outputs a table with the list of detected devices on the specified bus.
# ADC.read(channal) # Channal范围从0到3
# ADC.write(Value) # Value范围从0到255
#
#------------------------------------------------------
#SMBus (System Management Bus,系统管理总线)
import smbus #在程序中导入“smbus”模块
import time
# for RPI version 1, use "bus = smbus.SMBus(1)"
# 0 代表 /dev/i2c-0, 1 代表 /dev/i2c-1 ,具体看使用的树莓派那个I2C来决定
bus = smbus.SMBus(1) #创建一个smbus实例
#在树莓派上查询PCF8591的地址:“sudo i2cdetect -y 1”
def setup(Addr):
global address
address = Addr
def read(chn): #channel
if chn == 0:
bus.write_byte(address,0x40) #发送一个控制字节到设备
if chn == 1:
bus.write_byte(address,0x41)
if chn == 2:
bus.write_byte(address,0x42)
if chn == 3:
bus.write_byte(address,0x43)
bus.read_byte(address) # 从设备读取单个字节,而不指定设备寄存器。
return bus.read_byte(address) #返回某通道输入的模拟值A/D转换后的数字值
def write(val):
temp = val # 将字符串值移动到temp
temp = int(temp) # 将字符串改为整数类型
# print temp to see on terminal else comment out
bus.write_byte_data(address, 0x40, temp)
#写入字节数据,将数字值转化成模拟值从AOUT输出
if __name__ == "__main__":
setup(0x48)
#在树莓派终端上使用命令“sudo i2cdetect -y 1”,查询出PCF8591的地址为0x48
while True:
print '电位计 AIN0 = ', read(0) #电位计模拟信号转化的数字值
print '光敏电阻 AIN1 = ', read(1) #光敏电阻模拟信号转化的数字
print '热敏电阻 AIN2 = ', read(2) #热敏电阻模拟信号转化的数字值
tmp = read(0)
tmp = tmp*(255-125)/255+125
# 125以下LED不会亮,所以将“0-255”转换为“125-255”,调节亮度时灯不会熄灭
write(tmp)
time.sleep(2)
若想深入学习模/数转换等模电知识,强烈推荐以下书籍,国外大学最经典模电教程,比国内教程生动有趣更易懂。扫码购买或者点击下面的链接。

《模拟电子基础》点击购买:https://u.dangdang.com/OIVk
第4步: 编写PS2操纵杆控制程序。将摇杆向上推,屏幕上会打印一条“up”字样;向下推,然后打印“down”。如果你向左推,“left”将被打印;如果你向右推,就会打印出“right”。如果按下盖子,屏幕上将打印“Button Pressed”。
#!/usr/bin/env python
import PCF8591 as ADC
import time
def setup():
ADC.setup(0x48) # Setup PCF8591
global state
def direction(): #获取操纵杆方向结果
state = ['home', 'up', 'down', 'left', 'right', 'Button pressed']
i = 0
if ADC.read(0) <= 5:
i = 1 #up
if ADC.read(0) >= 250:
i = 2 #down
if ADC.read(1) <= 5:
i = 3 #left
if ADC.read(1) >= 250:
i = 4 #right
if ADC.read(1) >= 6 \ #由于未知原因,向左摇操纵杆会自动触发按键按下信号
and ADC.read(2) == 0: #所以加上ADC.read(1) >= 6这个限制,
i = 5 # Button pressed
if ADC.read(0) - 125 < 15 \
and ADC.read(0) - 125 > -15 \
and ADC.read(1) - 125 < 15 \
and ADC.read(1) - 125 > -15 \
and ADC.read(2) == 255:
i = 0 #home
return state[i]
def loop():
status = ''
while True:
tmp = direction()
if tmp != None and tmp != status:
print tmp #不为空和tmp值变化时打印
status = tmp
def destroy():
pass #pass语句就是空语句
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()



















 5232
5232

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











