







1、简介
这是个关于pmac上位机的简单编程,以下皆以1号电机为例,其他电机需根据实际修改变量
2、代码
2.1 dll的导入
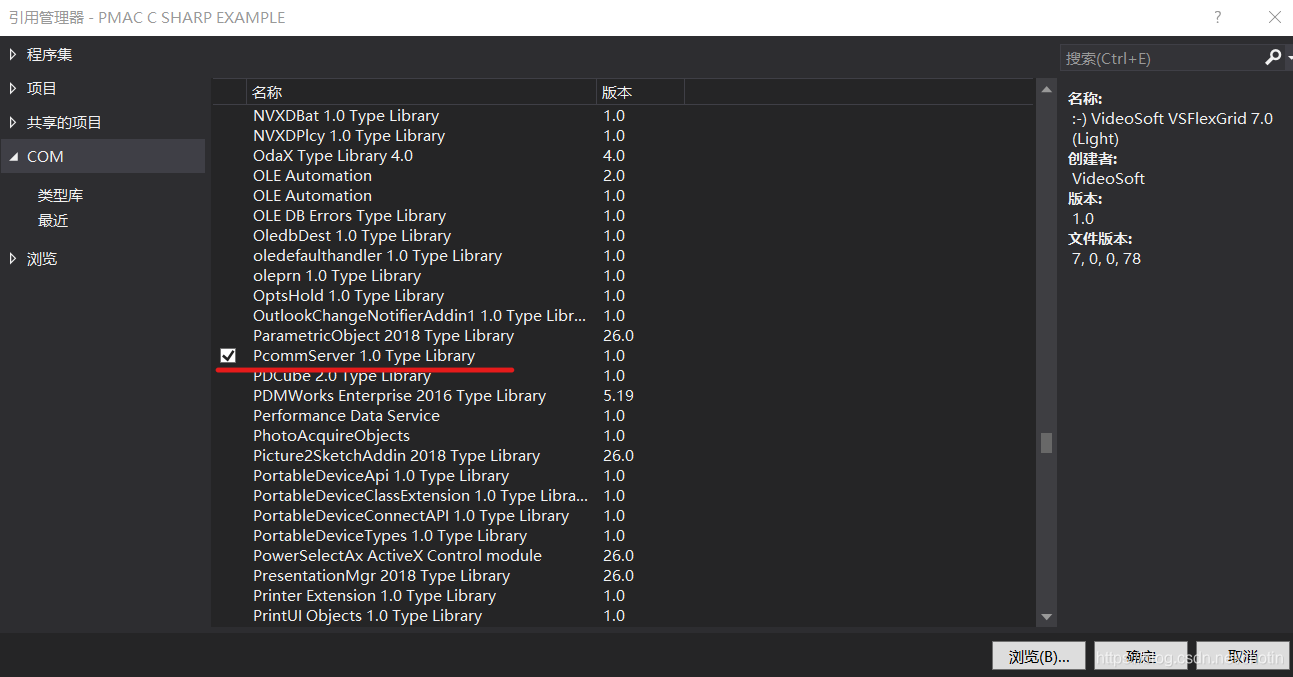
第一种方法:首先要下载pmac的软件pewin32 pro,在vs中新建一个项目,在引用——添加引用——COM中查找PcommServer 1.0 type Library,确认引入。
第二种方法:官网下载
2.2 实例化
using PCOMMSERVERLib;
public partial class DEMO : Form
{
public static PCOMMSERVERLib.PmacDeviceClass PMAC;
public bool selectPmacSuccess = false;
public bool openPmacSuccess = false;
public int pmacNumber;
// 1. (打开程序后的动作)
public DEMO()
{
InitializeComponent();
PMAC = new PmacDeviceClass();
}
}
2.3 建立通讯
// 2. 建立通讯
privat 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 798
798

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









