







论文链接:Segment Anything in 3D with Radiance Fields
代码链接:GitHub - Jumpat/SegmentAnythingin3D: Segment Anything in 3D with NeRFs (NeurIPS 2023)
作者:Jiazhong Cen, Jiemin Fang, Zanwei Zhou, Chen Yang, Lingxi Xie, Xiaopeng Zhang, Wei Shen, Qi Tian
发表单位:上海交通大学、华为公司、华中科技大学启蒙学院 .
会议/期刊:NeurIPS 2023
一、研究背景
计算机视觉领域一直在追求一个可以在任何场景下执行基本任务(如分割)的视觉基础模型。在这些研究中,Segment Anything Model (SAM) 是代表性工作之一,因为它在2D图像中的分割表现非常出色。然而,将SAM的能力扩展到3D场景仍然是一个未解决的难题。作者指出,尽管可以复用SAM的管道来采集和半自动注释大量3D场景数据,但由于3D数据的获取和密集注释远比2D复杂,采用这种数据驱动的方法变得不切实际。
获取并标注3D数据集的复杂性导致3D场景中数据稀缺,同时训练3D模型的计算开销大。这使得在3D场景中使用类似于SAM的分割模型成为一项巨大的挑战。传统的做法可能是从零开始建立一个3D基础模型,但这并不经济。
论文的作者意识到一个替代且高效的解决方案:通过3D表示模型为2D基础模型(即SAM)提供3D感知能力,而不是从头开始构建3D基础模型。为此,他们借鉴了辐射场(Radiance Fields)的理念,提出了一个名为Segment Anything in 3D (SA3D) 的新方法。
辐射场模型作为一种新颖的3D表示方式,通过可微渲染技术将多视图的2D图像与3D空间连接起来。该研究提出将SAM与辐射场整合,以促进3D分割。
论文的主要贡献总结如下:
-
提出了SA3D框架:该框架是一个创新性的3D分割方法,结合了2D分割基础模型Segment Anything Model (SAM)与辐射场模型(如NeRF和3D Gaussian Splatting),无需重新设计或重新训练即可执行3D分割任务。SA3D通过2D分割模型的扩展,提供了一种高效的方式,将2D图像信息提升到3D场景中,实现准确的3D分割。
-
设计了掩码逆向渲染和自提示机制:该方法包含两大核心步骤:掩码逆向渲染用于将2D分割结果投影到3D空间,自提示机制通过在不同视角下生成可靠的提示点,进一步优化分割结果。这一双重过程不断迭代,最终生成精准的3D掩码。
-
引入了特征缓存机制:为了加快推理速度,SA3D引入了特征缓存机制,通过预缓存SAM提取的特征显著提升了分割速度,特别是在高效表示如3D Gaussian Splatting的场景下,可将分割速度缩短至2秒内。
-
适应不同类型的辐射场:论文中展示了SA3D在不同类型的辐射场下的适应能力,证明了该方法的通用性,能够处理从前向视角到360度全景场景的多种复杂场景。
-
扩展了实验评估:论文提供了大量实验结果,包括消融研究和对各组件的深入分析,进一步展示了SA3D在不同场景和数据集上的表现,验证了该方法的有效性和高效性。
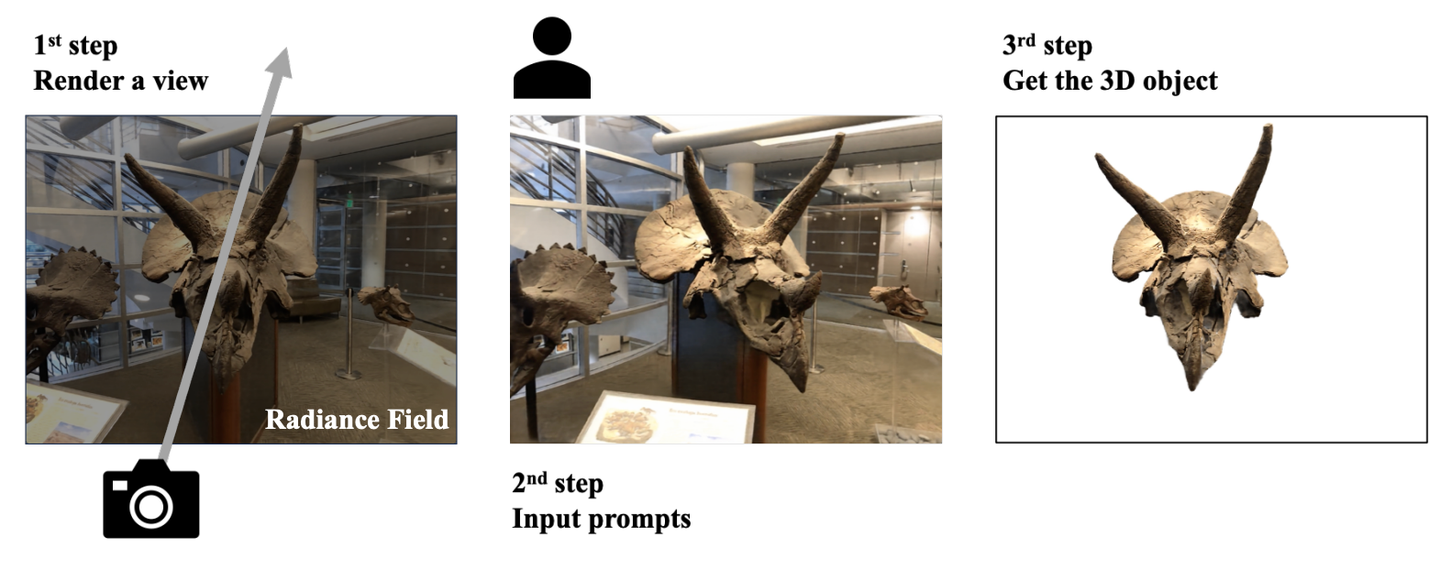
给定一个预先训练的辐射场,SA3D会从一个将单个渲染视图作为输入,并输出3D分割结果针对特定目标。
二、预备知识总结
2.1 神经辐射场(NeRF)
NeRF(Neural Radiance Fields)是用于表示3D场景的连续函数,通过多层感知机(MLP)将空间坐标 和视角方向
映射到相应位置的颜色
和体积密度
。渲染图像时,NeRF通过光线投射技术生成每个像素点的颜色,公式如下:
其中,权重 表示在射线路径 r(t)上的透明
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 920
920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









