







第二章 单目标滤波
2.1简介
2.1.1 要点概括
- 贝叶斯视角下,卡尔曼滤波器可以重新表述。
- 卡尔曼方程实际上是贝叶斯规则的一个特例
- 贝叶斯理论框架为理解卡尔曼本质及其成立条件或失效条件提供了一种直观地视角
- 单目标递归贝叶斯滤波器—在解决其他方法难以奏效的应用问题时拥有巨大潜能
- 单目标贝叶斯滤波器的应用表现貌似简单,尤其是在关心实现的应用中
- 实际中,单目标贝叶斯滤波器的实时实现需要近似技术。
- 如果能够有效的建模传感器之间的相互关系,则单目标贝叶斯滤波器就可以为多传感器单目标数据融合提供一个严格的理论基础
- 一个不可忽视的问题:在什么情况下不太适合使用贝叶斯滤波器。什么情况下用传统方法足以解决问题
- 在启发式建模中,模型往往是ad Hoc型设计的,因此会受到现实世界的物理现象和实现技术的双重约束
- 形式化建模以独立于实现的统计模型为基础,可适用于原则近似技术
- 形式化贝叶斯建模的基本目标之一就是推导可如实反映观测和运动模型的真实似然函数和马尔科夫密度
- 形式化贝叶斯模型的 一个重要结果就是算法行为更容易于解释,究其原因,主要是与模型和设计过程有关的重要假设都分解为一套系统的、条理清楚的的推理程序。
2.2卡尔曼滤波器
卡尔曼滤波器是目前为止信息融合领域最为熟悉、应用最广的算法。
 定义了以Xk|k为中心半径为1西伽马所有状态构成的超球,误差区间的多维推广;
定义了以Xk|k为中心半径为1西伽马所有状态构成的超球,误差区间的多维推广;
2.2.1初始化
2.2.2预测器
 ;确定性运动模型xk+1=Fkx仅是一种假定,常常xk+1并不等于Fkx,而是包含一些扰动,这些扰动假定为零均值,协方差等于Qk的高斯随机矢量Vk,如果模型失配则增大Vk,Fk为状态转移矩阵。
;确定性运动模型xk+1=Fkx仅是一种假定,常常xk+1并不等于Fkx,而是包含一些扰动,这些扰动假定为零均值,协方差等于Qk的高斯随机矢量Vk,如果模型失配则增大Vk,Fk为状态转移矩阵。

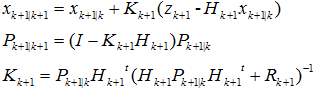
2.2.3校正器

Zk+1=Hk+1x描述从状态到观测的转换确定性模型,由于包含一些内部噪声,这些扰动假定为零均值,协方差等于Rk的高斯随机矢量Wk。
因此可以推导出目标状态的最优估计:
2.2.4卡尔曼滤波器的推导
(略)http://blog.csdn.net/tudouniurou/article/details/6277520
2.2.5基于卡尔曼滤波器的观测融合
2.2.6固定增益卡尔曼滤波器
2.3卡尔曼滤波器的贝叶斯表示
2.3.1数学预备知识
高斯分布概率密度函数:多维高斯分布的矩阵表达2.3.2KF的贝叶斯表示:预测器
运动模型定义如下概率密度函数(马尔科夫转移密度)

同样可定义如下概率密度来封装k时刻的卡尔曼状态估计Xk|k及其协方差矩阵Pk|k所包含的信息。

由于fk|k(x'|zk)表示目标状态为x’的先验概率密度,因而乘积fk+1|k(x|x')*fk|k(x'|Zk)表示了k时刻目标状态为x'而在k+1时刻状态为x的概率,对于所有的先验状态x'求积分可得全概率fk+1|k(x),它表示了k+1时刻的状态为x的概率。
fk+1|k(x)=积分fk+1|k(x|x')*fk|k(x'|Zk)dx'=积分NQk(x-Fx')*NPk|k(x'-xk|k)dx'
全概率公式意义:它是完全依赖概率密度函数表示的卡尔曼预测器的数学等价
2.3.3KF的贝叶斯表示:校正器
由观测模型定义的概率密度函数(似然函数):
fk+1(z|x)=NRk+1(Z-Hk+1x)如实的封装了观测模型包含的的信息。
同样可以定义如下概率密度密度来封装k+1时刻的卡尔曼状态预测xk+1|k 及其协方差Pk+1|k包含的信息
fk+1|k(x|Zk)=Pk+1|k(x-xk+1|k)概率密度函数fk+1|k(x|Zk)封装了zk+1 之前的所有先验信息。使得Hk+1x距离zk+1越近的x概率密度fk+1(zk+1|x)越大反之越小。乘积=fk+1(zk+1|x)*fk+1|k(x|zk)就相当于采用新数据来调整先验密度fk+1|k(x|zk)。
fk+1|k+1(x)=乘积/积分乘积
因此上式的意义:它是完全依赖概率密度函数表示的卡尔曼滤波器的数学等价形式。
2.3.4KF的贝叶斯表示:估计
按照贝叶斯表示下的数据更新方程fk+1|k+1(x|zk+1)=Npk+1|k+1(x-xk+1|k+1)2.4单目标贝叶斯估计
卡尔曼预测期和校正器是贝叶斯滤波器的特例。
2.4.2与卡尔曼滤波器的关系
为什么卡尔曼滤波器要用最小二乘形式:原因是限定了传感器具有线性高斯的统计特性。为了使贝叶斯方程具有解析解,马尔科夫转移密度和后验概率分布必须有线性高斯的形式,因而其二次型也可定义,这就决定了最小二乘优化是卡尔曼滤波器固有的优化方式。
卡尔曼滤波器假定传感器和目标的的行为都是良性的,从而可以用单峰不太歪斜后验分布表示单目标系统。当假设成立时表现出较好的特性。当假设不满足时,比如目标快速非线性激动或者信噪比很低,卡尔曼滤波器就会失效。
在采集数据率较小的情况下,目标机动期间的观测数据减少,后验概率的主模式和副模式相距较远,从而使高斯分布难以很好的近似后验概率,此时卡尔曼滤波器会发散,但贝叶斯滤波器正常工作。
在低信噪比情况下,如果非目标单元内的噪声很小,则后验分布具有单个优势模式(与目标相对应)以及大量的随机变化的微小副模式(由非目标像素处的噪声引入),副模式随着噪声功率增加而增加,它们在概率质量中所占比重越来越大,达到特定点后,副模式所占比例足够高以至于表现出多峰特性。贝叶斯后验概率程多峰状态,贝叶斯能够正确的精准的估计目标状态,但需要足够多的观测做递归处理后方可实现。snr越低,正确估计所需的的观测数就越多。
2.4.3建模
贝叶斯滤波方程为单传感器单目标问题提供了一个颇具潜力的强大理论依据。
贝叶斯滤波方程是概率理论中两个基本原理直接推论(全概率理论与贝叶斯规则)。
fk+1|k(x|x')(目标的马尔科夫转移密度)
Lk+1,z=Fk+1(z|x)(传感器似然函数)
如果似然函数不正确,那么任何所谓的最优性都是空谈,尤其是当似然函数的模型不太精确时,算法会浪费观测数据以克服与实际过程中的失配(或许会导致算法失效)对目标运动建模越精确,贝叶斯滤波器就月有效,否则将会小号一定量的数据来克服目标模型低效带来的负面影响。
建模分为启发式建模和形式化建模
启发式:指人在解决问题时采取一种根据经验规则进行发现的方法
应用问题的建模并非特别重要,重要的是算法内部的某些参数的调整
对物理过程理解的越肤浅,算法就需要越多的参数调整,从而造成更多的混乱和反复的修改
形式化:指分析研究思维的形式结构的方法
形式化方法把待搜索的算法解空间缩小到一个更容易处理的规模。
2.4.4形式化贝叶斯建模
单目标系统状态的数学建模
传感器观测的数学模型
目标的统计运动模型设计
传感器的统计运动模型设计
传感器的统计观测模型设计
根据运动模型构建真实马尔科夫转移密度
根据观测模型构建真实似然函数
2.5实现技术
形式化贝叶斯建模具有重要地位
2.5.1泰勒级数近似EKF
卡尔曼最初提出的滤波理论只适用于线性系统,Bucy,Sunahara 等人提出并研究了扩展卡尔曼滤波(Extended Kalman Filter,简称EKF),将卡尔曼滤波理论进一步应用到非线性领域。EKF的基本思想是将非线性系统线性化,然后进行卡尔曼滤波,因此EKF是一种次优滤波。
2.5.2混合高斯(GMF)近似
混合高斯滤波器(Gaussian Mixture Filter,GMF)使用混合高斯分布替代卡尔曼滤波器中的高斯分布。卡尔曼滤波器的推广。
GMF假定马尔科夫转移密度和似然函数都是非线性的,这种非线性可用高斯密度的加权和(混合高斯密度)来近似。
2.5.3贯序蒙特卡洛
贯序蒙特卡洛(Sequential Monte Carlo)近似
采用SMC的近似滤波又叫粒子滤波,粒子系统滤波 或者 聚合(condensation)滤波
粒子系统引入状态矢量集合,重要性权值集合来近似后验分布。
通常假定所有例子有相同的重要性权值,粒子代表从后验分布中抽取的随机样本















 791
791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









