







前言
本文主要是实现halcon脚本找直线,并根据两条拟合直线计算交点坐标,并得出其位置角度。
一、图片分析
本文主要针对一下图片进行检测:
图1:
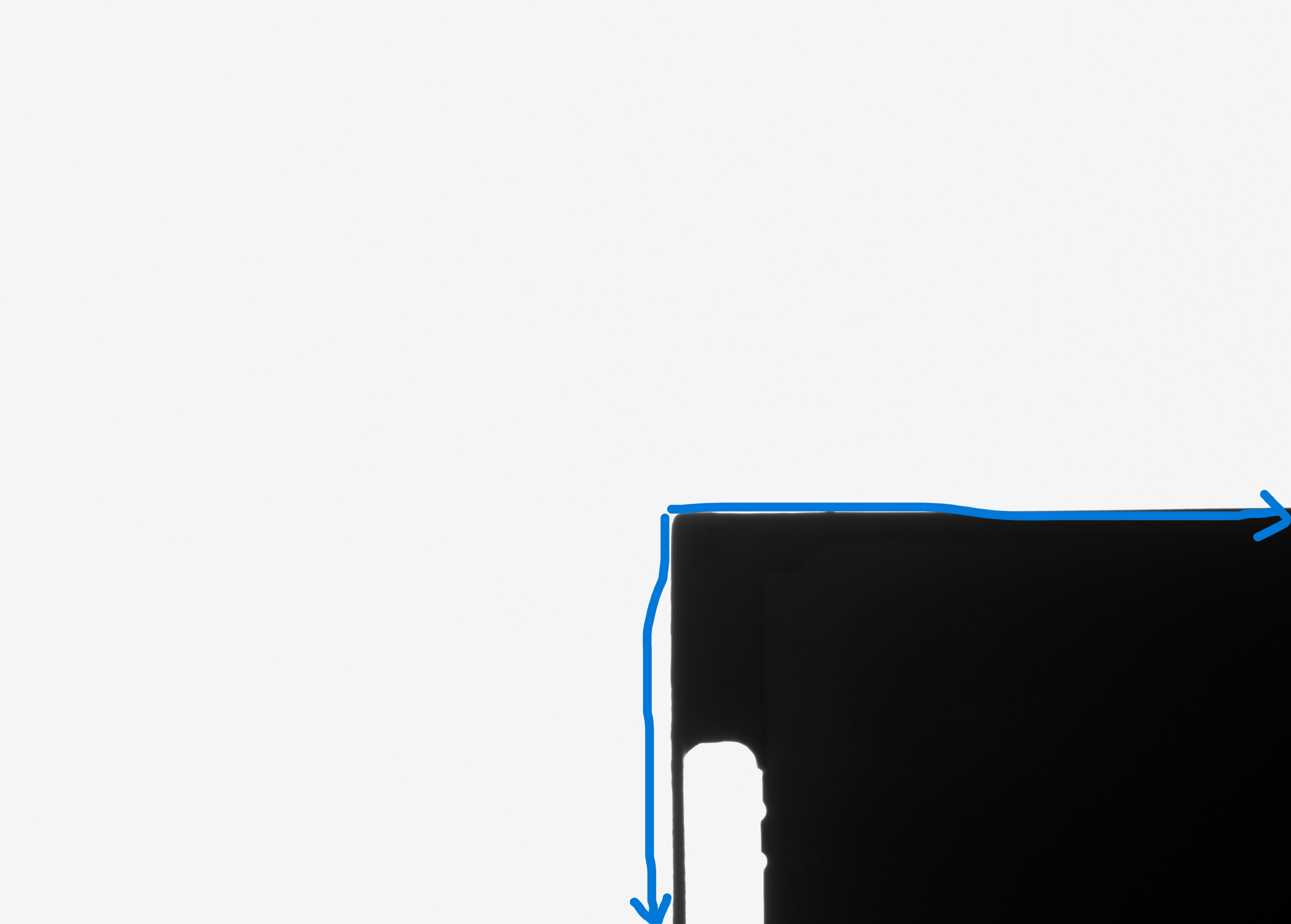
图2:
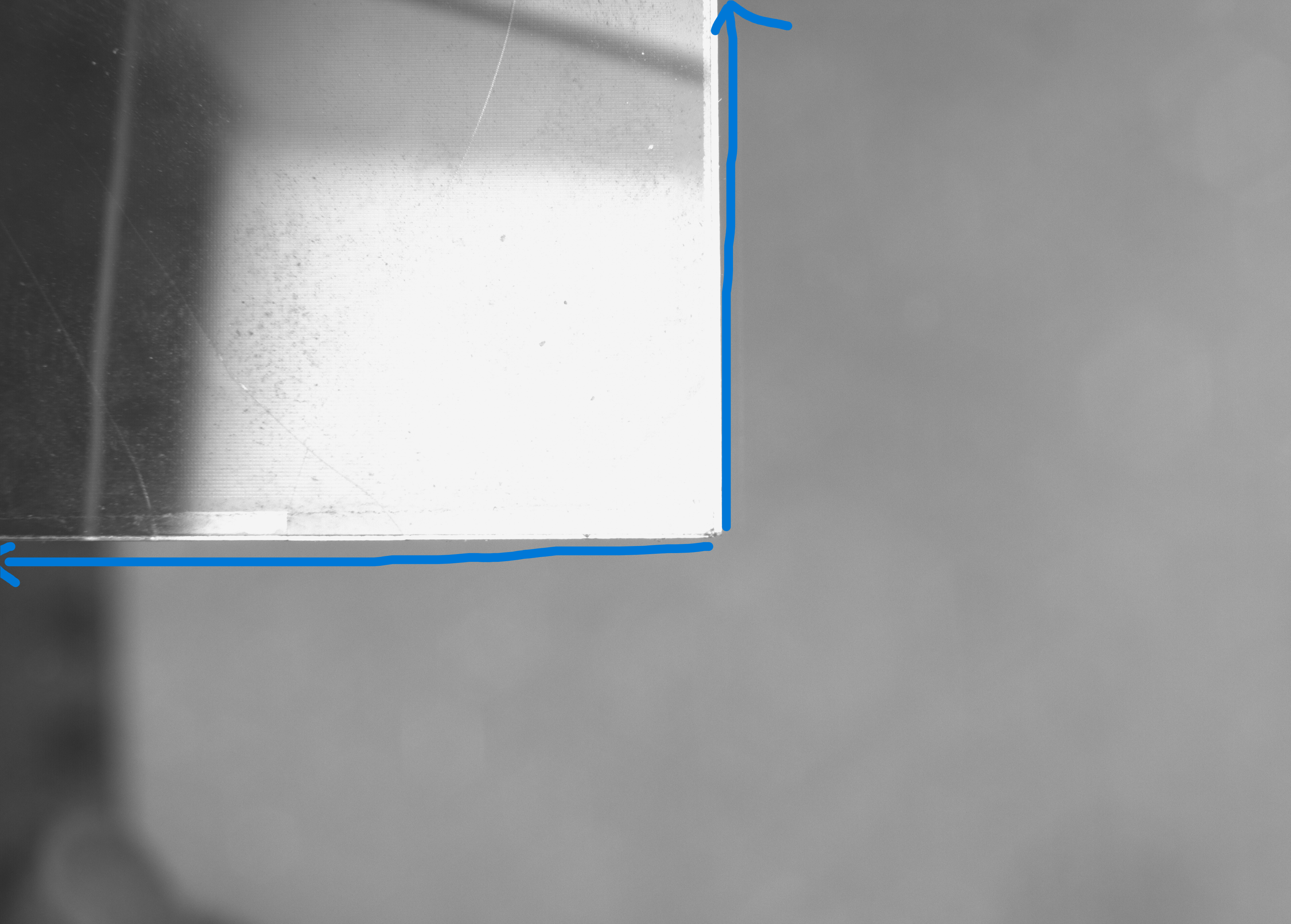
从图上标明可知,本次检测就是我画的蓝色的线条部分
二、思路
根据现场照片来说,本次的实验的工件存在各种角度,不单单是摆着那么正的,因此步骤如下:
1、先使用模板匹配初步定位板子;
2、根据定位的位置:x,y,r来得到基于模板的两条直线(模板中心垂直的两条线)
3、根据两条线,分别得到一系列点,然后使用循环,点和点之间进行测量检测,最后得到检测出来的点
4、把检测出来的点拟合并绘制,并计算两点之间的交点
三、代码
1.指定模板
for Index := 0 to Number-1 by 1
select_obj (Image, temp_Image, Index+1)
draw_rectangle1 (WindowHandle, Row1, Column1, Row2, Column2)
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
reduce_domain (temp_Image, Rectangle, ImageReduced)
create_ncc_model (ImageReduced, 'auto', -rad(180), rad(360), 'auto', 'use_polarity', ModelID_temp)
tuple_concat (ModelID, ModelID_temp, ModelID)
endfor
2.定位模板
read_image (CheckImage, ImageFiles[img_index])
find_ncc_model (CheckImage, ModelID, -rad(180), rad(360), 0.8, 1, 0.5, 'true', 0, Check_Row, Check_Column, Check_Angle, Check_Score)
3.得到一系列基于目标的点
area_center (Rectangle, Area, Row, Column)
vector_angle_to_rigid (Row, Column, 0, Check_Row, Check_Column, Check_Angle, Check_HomMat2D)
affine_trans_region (Rectangle, RegionAffineTrans2, Check_HomMat2D, 'constant')
gen_cross_contour_xld (Cross, Check_Row, Check_Column, 100, Check_Angle)
4.遍历点,得到新点
这里的重要算子使用:measure_pos,用测量方法得到点
gen_cross_contour_xld (Cross, Check_Row + (stratLength+Index)*cos(Check_Angle), Check_Column + (stratLength+Index)*sin(Check_Angle), 100, Check_Angle)
dev_display (Cross)
gen_measure_rectangle2 (Check_Row + (stratLength+Index)*cos(Check_Angle), Check_Column + (stratLength+Index)*sin(Check_Angle), Check_Angle, CheckHeight, CheckLength, Width, Height, 'nearest_neighbor', MeasureHandle)
measure_pos (CheckImage, MeasureHandle, 1, 40, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
if (|RowEdge|>0)
tuple_concat (Point1_Row, RowEdge[0], Point1_Row)
tuple_concat (Point1_Col, ColumnEdge[0], Point1_Col)
endif
close_measure (MeasureHandle)
总结&效果
1.创建模板

2.遍历查找各点




3.最后效果



















 171
171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











