







物体的局部信息可以用来进行精细分类,这篇文章学习了整个物体和物体局部检测器,从pose-normalized表示预测精细分类。局部定位可以反应物体之间的关联,并能降低物体姿态或相机位置变化带来的影响。Poselet和DPM用于物体局部定位获得了一定的效果,但测试时只有在给定bbox时才能获得充足的局部定位信息。精细识别,属性识别,姿态估计及推理预测等需要准确的局部信息。
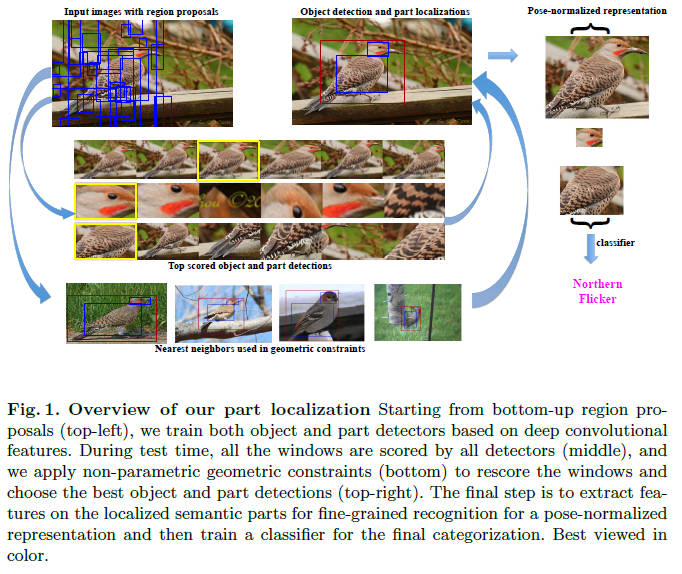
思路来源:在Caltech-UCSD bird数据库上,SS提取局部proposal的平均recall为95%,使用R-CNN同时定位整个物体和局部,整个思路流程如下所示。
Part-based R-CNNs
训练前准备这个物体和特定局部集 p1,p2,...,pn 的groundtruth标记,训练时物体和局部被认为是独立的物体类,使用proposal提取的特征训练1-all的SVM,overlap>=0.7的正样本,<0.3的负样本。对于一个物体,学习到整个物体(root)的SVM权值 w0 ,及所有局部 p1,p2,...,pn 的权值 w1,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2001
2001

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









