







 该博客介绍了如何通过HSV颜色识别技术使机器人实现垃圾分类功能。机器人在不同状态下识别垃圾并寻找垃圾桶,完成捡拾和丢弃过程。此外,文中还提到了函数在程序设计中的应用,增加了程序的可读性和整洁度。
该博客介绍了如何通过HSV颜色识别技术使机器人实现垃圾分类功能。机器人在不同状态下识别垃圾并寻找垃圾桶,完成捡拾和丢弃过程。此外,文中还提到了函数在程序设计中的应用,增加了程序的可读性和整洁度。
上期我们利用到机器人的RGB颜色识别让机器人可以实现定位抓取物体的功能。这期我们来介绍另一个识别机制HSV识别,并通过这个识别机制让机器人实现垃圾分类的功能。
预期效果:
利用颜色的HSV识别不同颜色的垃圾和垃圾桶,机器人在不同的状态下检测是否有垃圾,捡完垃圾后,转动头部寻找垃圾桶,如果前方没有找到垃圾桶就执行转身,寻找身后的垃圾桶。找到垃圾桶后执行丢垃圾动作。

预期效果
一、道具准备
用3个颜色不同的纸团代替不同的垃圾,用蓝色纸团来代替可回收物,绿色纸团来代替厨余垃圾,用红色纸团来代替有害垃圾。
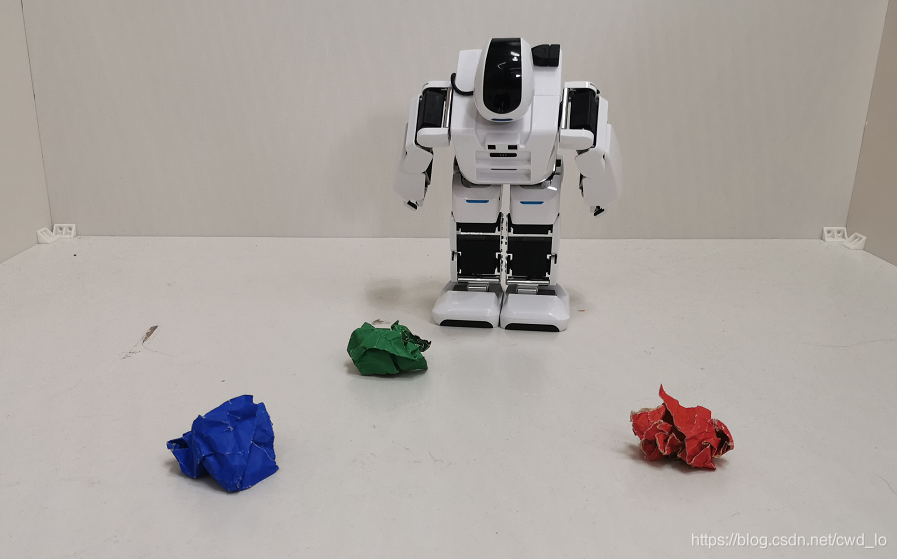
用纸团代替不同类别垃圾
蓝色桶来代替可回收收集容器,绿色桶来代替厨余垃圾收集容器,红色桶来代替有害垃圾收集容器。
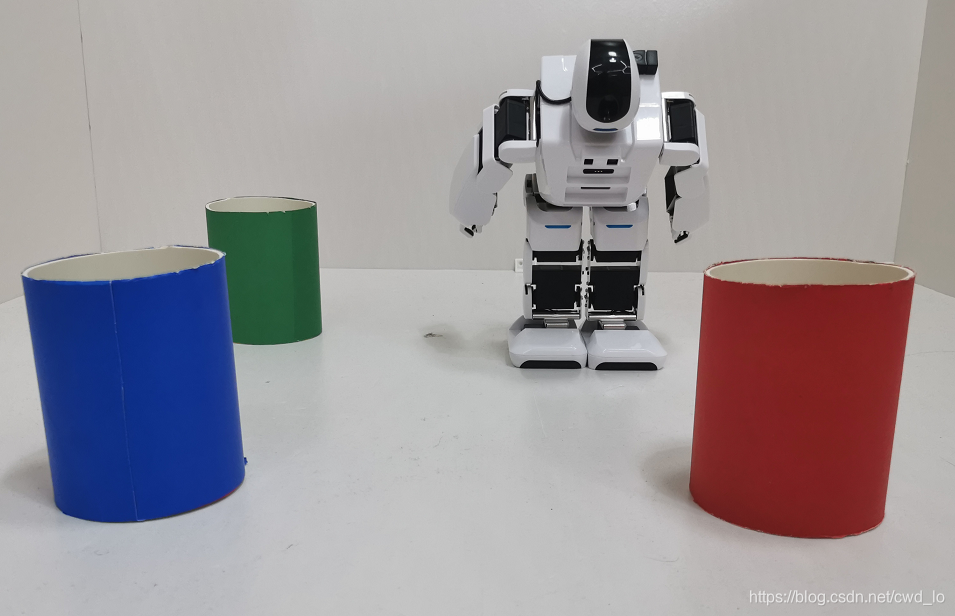
用桶代替收集容器
二、程序编辑
1、识别“垃圾”
1)确定颜色顺序,案例中以红、蓝、绿三个顺序依次拾取
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 751
751

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









