






今天继续更新机器人的运动会系列——打高尔夫。
开发思路:
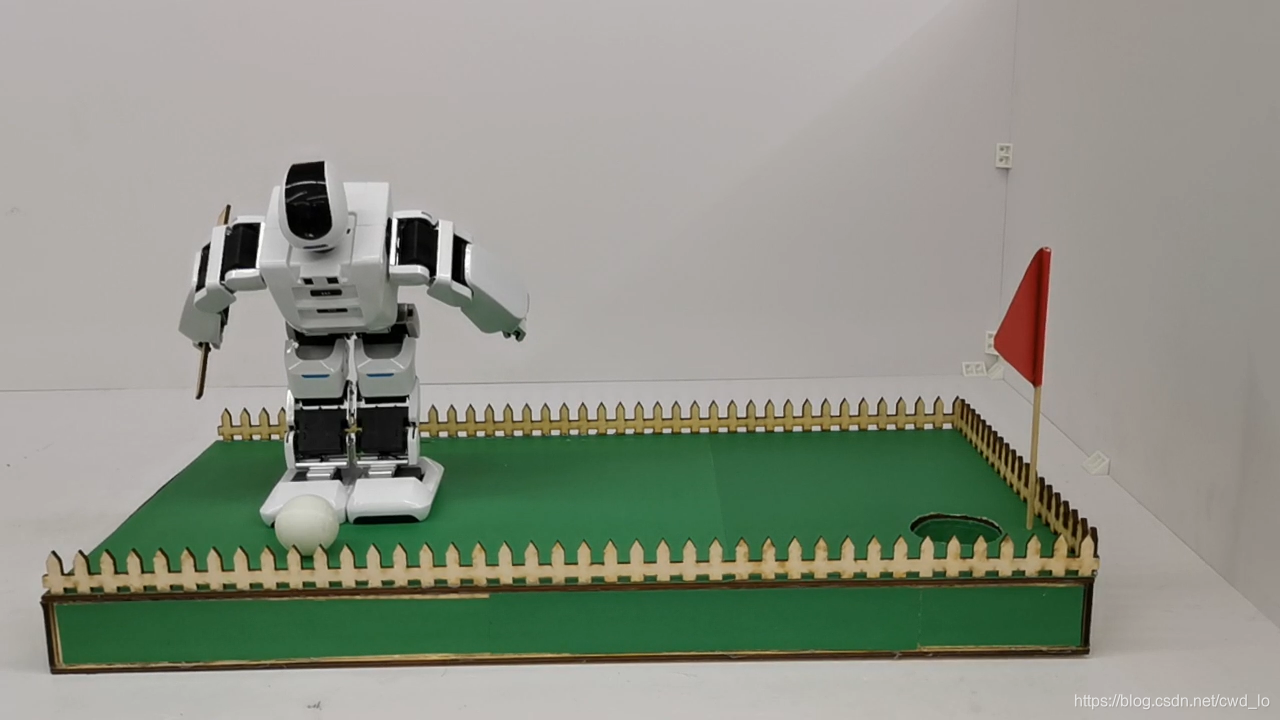
机器人识别到红色小旗子就执行弯腰检测前方是否有高尔夫球。高尔夫球杆的制作需求满足机器人手抓和机器人高度,让机器人在执行挥杆的动作时有更大的把握击中高尔夫球。
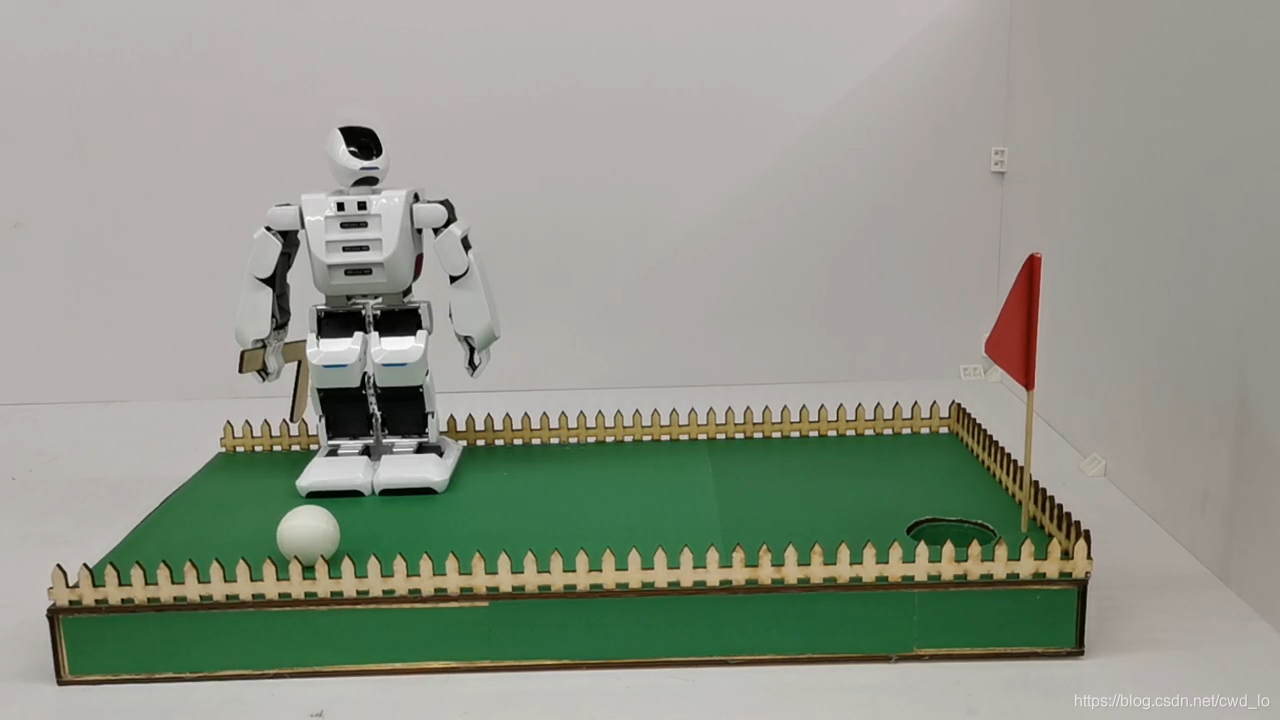
预计效果:
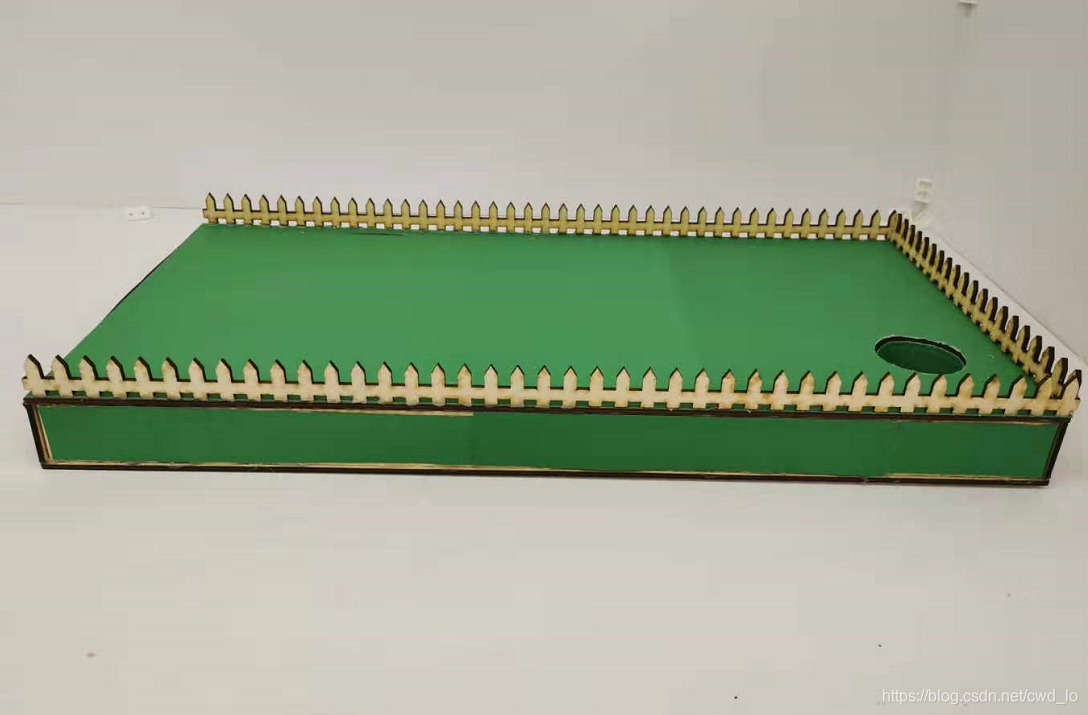
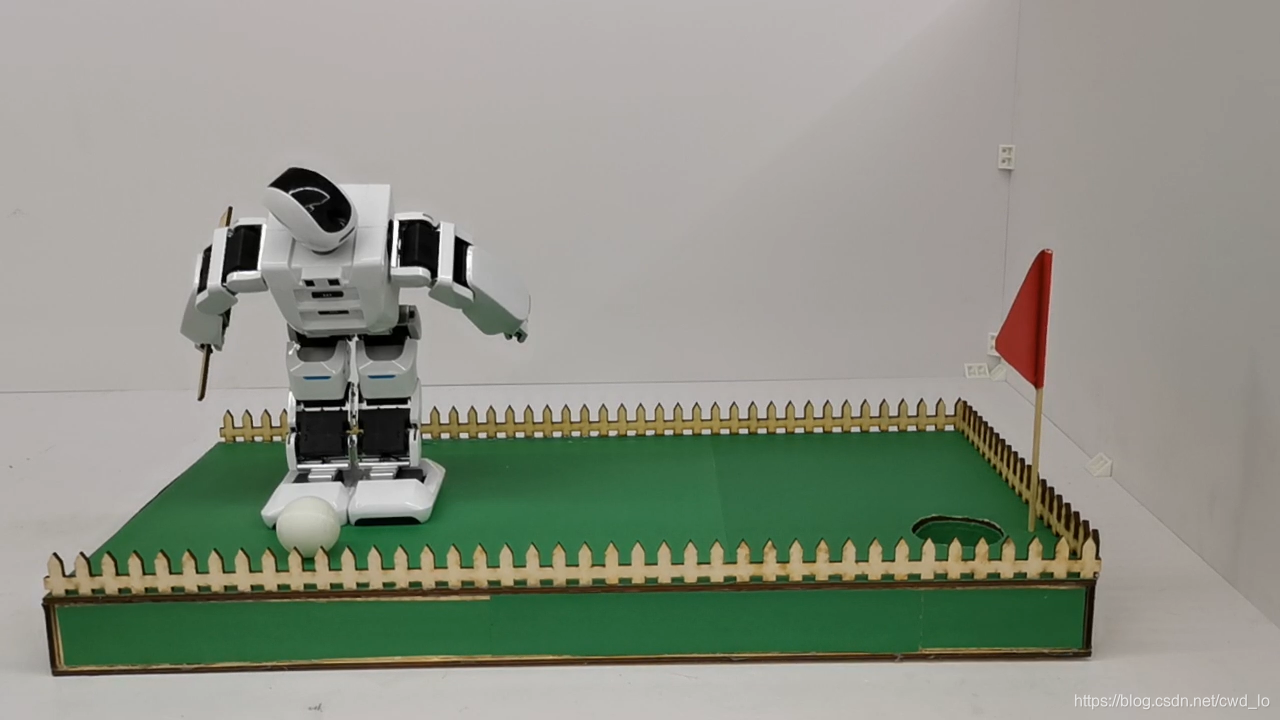
1、高尔夫球台的制作
为了便于机器人行走与颜色识别,搭建一个长800毫米,宽400毫米,高53毫米的高尔夫台子,台子颜色贴上绿色卡纸。在设计高尔夫台子时,要在高尔夫台子上留有直径为74毫米的高尔夫球洞,与直径4.5毫米的可以插入小旗子的小孔。
2、红色小旗的制作
为了方便识别到高尔夫球洞,在球洞旁插入一个红色小旗子,旗杆长20.4厘米,红色小旗子底12厘米,高14厘米。
3、高尔夫球的制作
为了便于在绿色高尔夫球台上识别高尔夫球,高尔夫球颜色设计为白色,直径为6厘米。
4、高尔夫球杆的制作
机器人需手握球杆行走,所以球杆设计长为21厘米左右,球杆倾斜角度为102度,杆头为弧状。



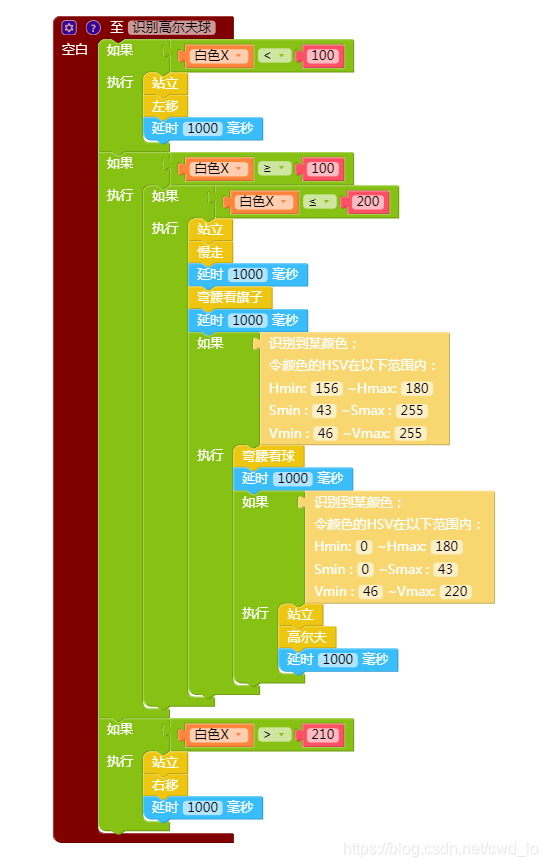
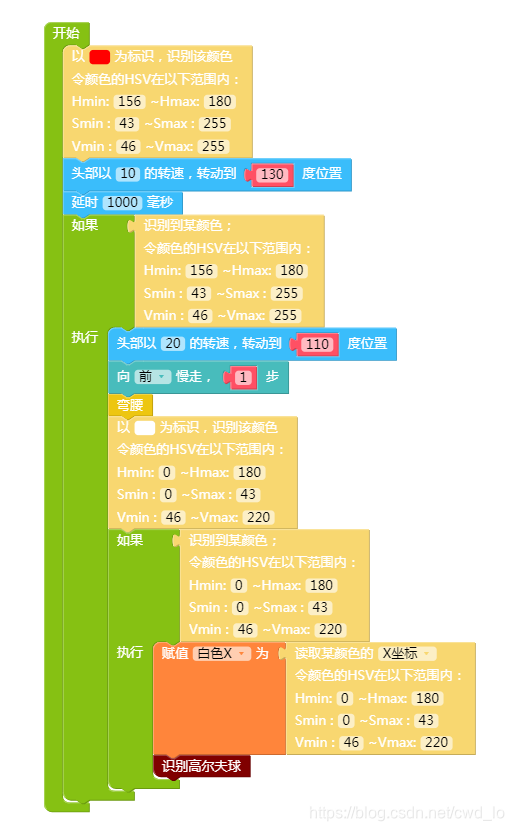
二、机器人程序设计
1)第一步:转头识别红色小旗:第二步:向前走两步,识别小球:第三步:识别小球后再识别红色小旗确定位置:第四步:挥杆打球

三、程序设计
这期是运动会系列最后一期,下周我们将继续更新机器人的视觉识别系列。下周见。
参考网址:https://bbs.lejurobot.com/














 6352
6352











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









