







1.接线
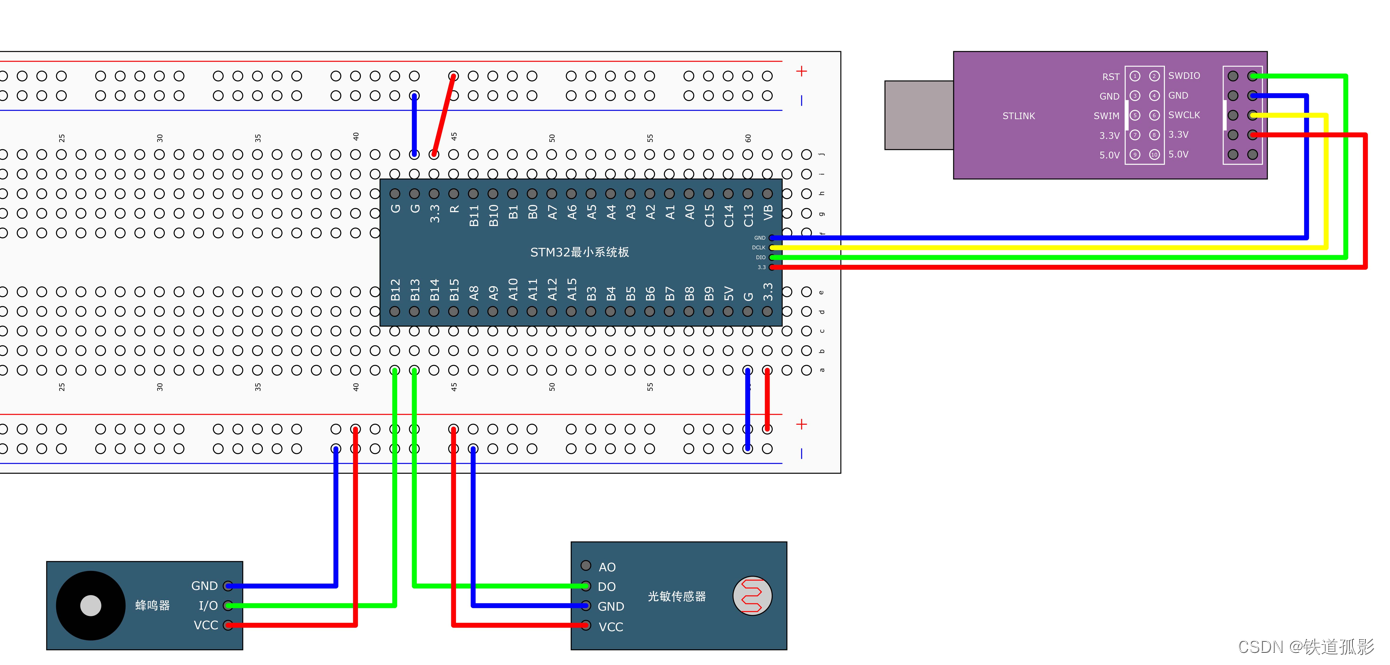
按图接线,正确的接好之后,光纤传感器应当是弱光亮“PWR-LED",强光的时候”PWR-LED"和“DO-LED"两个灯都亮,如果不是这样的有两个方法调整或测试:
1.调整旋钮,可以调节光敏传感器的光敏电阻阈值
2.用手机的电筒照一下光敏电阻,看看是不是你当时的环境光实在太弱,不足以触发传感器。
2.写硬件的驱动文件
2.1蜂鸣器驱动
首先复制上次的工程文件,然后右键”Hardware"文件夹,新建两个文件:“Buzzer.c","Buzzer.h"
2.1.1Buzzer.c
首先要包含STM32的头文件
#include "stm32f10x.h" 然后定义蜂鸣器的初始化函数如下,因为蜂鸣器是接在GPIOB12管脚,所以这里的时钟使能和GPIO结构体定义都是GPIOB
void Buzzer_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}然后分别定义蜂鸣器的开启、关闭
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
整个蜂鸣器驱动的c文件写完了,整体代码如下
#include "stm32f10x.h" // Device header
void Buzzer_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
}
2.1.2Buzzer.h
写完C文件之后,在h文件中要把编写的函数名放进去声明一下,跟前面的例子是一样的。
#ifndef __BUZZER_H
#define __BUZZER_H
void Buzzer_Init(void);
void Buzzer_ON(void);
void Buzzer_OFF(void);
#endif
这里需要注意的是,#endif下方一定要留个空行,不然keil会报错。显示的就是#endif下方没有空行
![]()
2.2传感器驱动
跟2.1节中一样,在"Hardware"文件夹下新建两个文件:
2.2.1Lightsensor.c
第一步仍然是包含STM32的头文件
#include "stm32f10x.h" 紧接着定义两个函数,第一个是传感器的初始化函数,第二个是传感器引脚电平的读取函数。初始化函数其实就是GPIO的初始化,涉及时钟使能和GPIO结构体的配置,这个已经讲烂了。读取函数是使用的GPIO_ReadInputDataBit()函数,具体的函数简介可以到GPIO.h这个里面详细的看。(其实也不用看,用两次就记得了)
void LightSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);
}2.2.2Lightsensor.h
同样的在写完c文件之后,里面定义的函数要在h文件中声明
#ifndef __LIGHT_SENSOR_H
#define __LIGHT_SENSOR_H
void LightSensor_Init(void);
uint8_t LightSensor_Get(void);
#endif
3.主函数
在写完两个硬件的驱动后,可以编写主函数实现光纤传感器控制蜂鸣器开关的功能了,具体是:光线暗蜂鸣器响,光线亮蜂鸣器不响。
主函数中显示初始化了这两个硬件,然后使用死循环,逻辑判断传感器的引脚电平为高,说明没有强光照射,那么开启蜂鸣器;反之,关闭蜂鸣器。
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
Buzzer_Init();
LightSensor_Init();
while(1)
{
if(LightSensor_Get()==1)
{
Buzzer_ON();
}
else
{
Buzzer_OFF();
}
}
}
















 583
583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









