






 本文详细介绍了如何使用STM32CUBEIDE配置STM32F407的高级定时器TIM1生成互补带死区的PWM信号,涉及定时器工作原理、计数模式、PWM模式设置和IDE操作步骤。
本文详细介绍了如何使用STM32CUBEIDE配置STM32F407的高级定时器TIM1生成互补带死区的PWM信号,涉及定时器工作原理、计数模式、PWM模式设置和IDE操作步骤。
概述
本章通过STM32CUBEIDE配置STM32F407输出互补带死区的PWM

定时器原理
本文选用的定时器为高级定时器TIM1,可生成互补带死区的PWM,其内部定时器原理如下图所示

其生成PWM波最主要的模块为其时基单元,时基单元主要包括:计数器寄存器 (TIMx_CNT)、预分频器寄存器 (TIMx_PSC)、自动重载寄存器 (TIMx_ARR)、重复计数器寄存器 (TIMx_RCR)。
预分频器可对计数器时钟频率进行分频,分频系数介于 1 和 65536 之间。

PWM模式
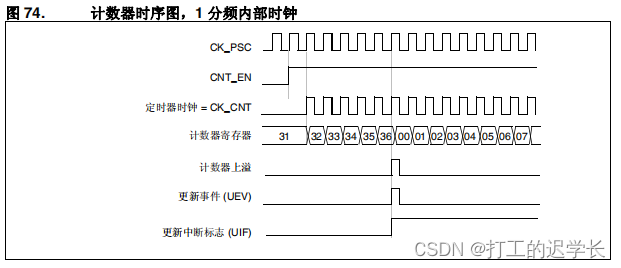
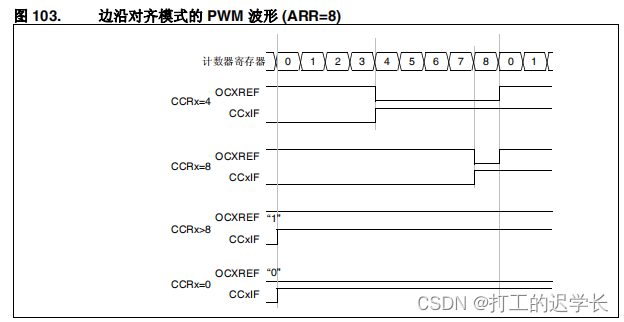
PWM边沿对齐模式-递增计数/递减计数
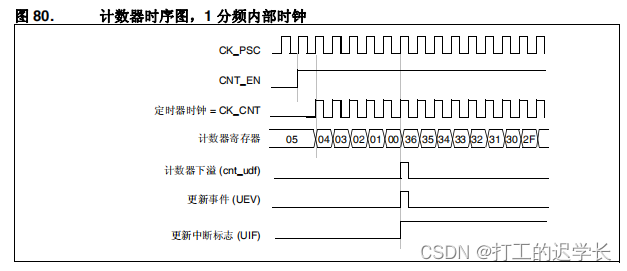
当 TIMx_CR1 寄存器中的 DIR 位为低时执行递增计数,只要 TIMx_CNT < TIMx_CCRx,PWM 参考信号 OCxREF 便为 高电平,否则为低电平。递减计数相似
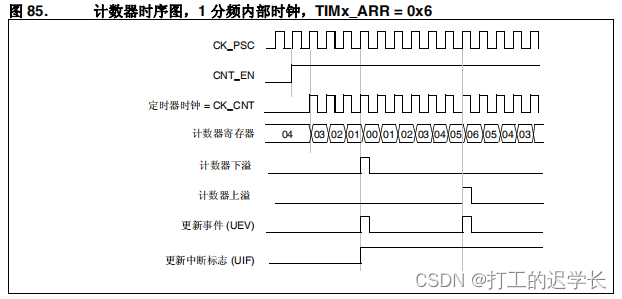
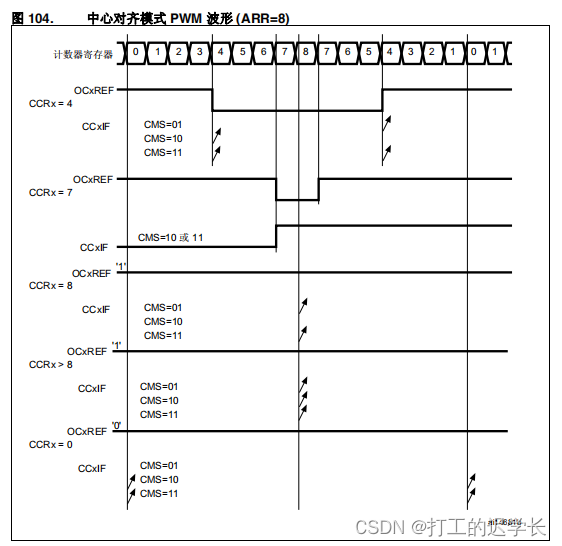
PWM中心对齐模式
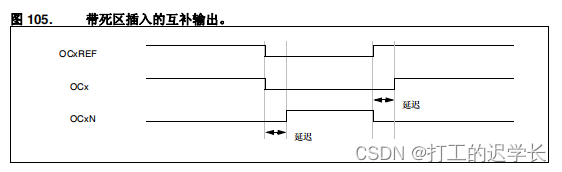
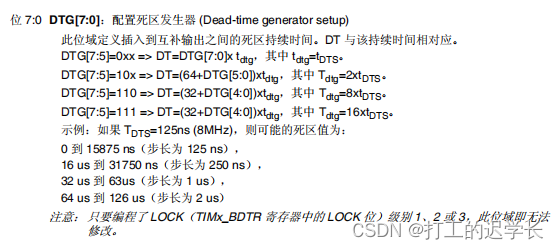
死区
IDE操作
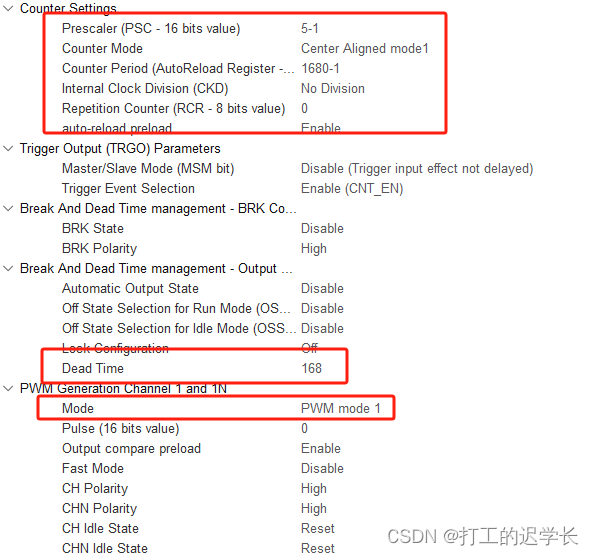
本章选用的为TIM1定时器,采用中心对齐模式1,生成互补带死区的PWM
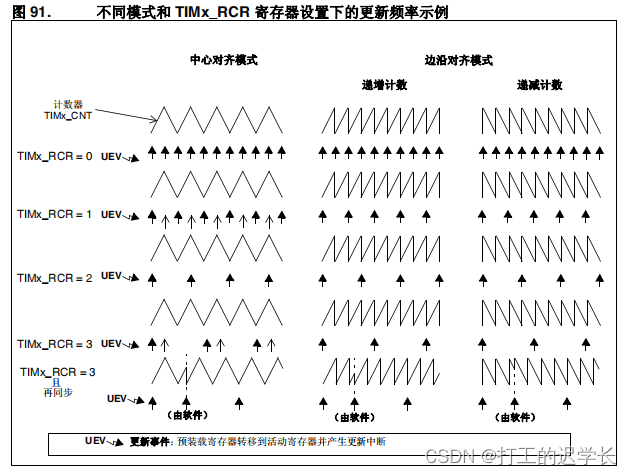
注意,这里的PWM频率为定时器时钟频率/((PSC+1)*(ARR+1)*2)
若RCR=0,则其中断频率为PWM频率的两倍

void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 5-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED1;
htim1.Init.Period = 1680-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_ENABLE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 168;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
// HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
// // __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 124);
// HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
// HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
在main.c函数里进行开启PWM操作
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);















 428
428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









