









相关配置:虚拟机VMware 16 Pro
ROS版本:melodic
Ubuntu版本:18.04
Coppeliasim版本:V4.5.1(edu版本);下载链接:https://www.coppeliarobotics.com/downloads
部分内容参考CaoDong street !以及CoppeliaSim学习笔记之CoppeliaSim Edu V4.1.0 + Ubuntu 16.04 + ROS Kinetic环境搭建与基础测试_coppeliasim 4.1 edu_汤姆与贝塔的博客-CSDN博客
一、创建工作空间
mkdir -p catkin_demo/src ##创建工作空间由于新版本Coppeliasm的特性,已经在软件包中内置sim_ros_interface以及ros_bubble_rob。无需在工作空间内下载相应的配置包。所以工作空间内src中只需要导入coppeliasim软件包。
通过上面的链接,下载相应Linux版本,会得到一个tar.xz后缀的文件,将其解压缩到工作空间src下,首先
cd catkin_demo/
cd src/
cd CoppeliaSim_Edu_V4_5_1_Ubuntu18_04/ #此处文件夹名称会有出入
./coppeliaSim.sh #运行coppeliasim,测试是否成功
# Crtl + C 退出
二、下载对应Cmake版本,(>=3.16)
cd /usr/src
sudo wget http://www.cmake.org/files/v3.16/cmake-3.16.6.tar.gz
sudo tar xf cmake-3.16.6.tar.gz
cd cmake-3.16.6
sudo apt-get install build-essential
cd /usr/src
sudo chmod -R 777 cmake-3.16.6
cd cmake-3.16.6
sudo ./bootstrap
sudo make
sudo make install
cmake --version三、安装python 3.X
注意:如果安装了Anaconda等虚拟环境,打开终端会自动出现(base),此时是虚拟环境下的Python版本,运行conda deactivate 可退出虚拟环境。
# 在安装前先在根目录下运行python--version 查看当前python版本
sudo apt install software-properties-common
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt install python3.8
python3.8 --version四、安装catkin工具
sudo apt install python3-catkin-tools python3-osrf-pycommon五、编译
sudo apt install xsltproc #下载xsltproc软件
sudo gedit ~/.bashrc
# 在~/.bashrc末尾添加:
export COPPELIASIM_ROOT_DIR=/home/b/catkin_demo/src/CoppeliaSim_Edu_V4_5_1_Ubuntu18_04 ##导入CoppeliaSim路径
catkin build -j4 ##编译六、运行
# 先运行roscore,再运行Coppeliasim
roscore
# 参考之前的步骤,运行
./coppeliasim.sh
# 查看ros节点
rosnode list
# 运行出来会有如下显示:
/rosout
/sim_ros_interface
除此之外,ROS与CoppeliaSim连接也可直接参考官网帮助文档。到这里ROS与CoppeliaSim之间的bridge基本配置完成,可以打开CoppeliaSim提供的ROS相关场景进行测试。
七、基础测试
CoppeliaSim自带的ros场景rosInterfaceTopicPublisherAndSubscriber.ttt,文件位于(/home/b/catkin_demo/src/CoppeliaSim_Edu_V4_5_1_Ubuntu18_04/scenes/messaging)
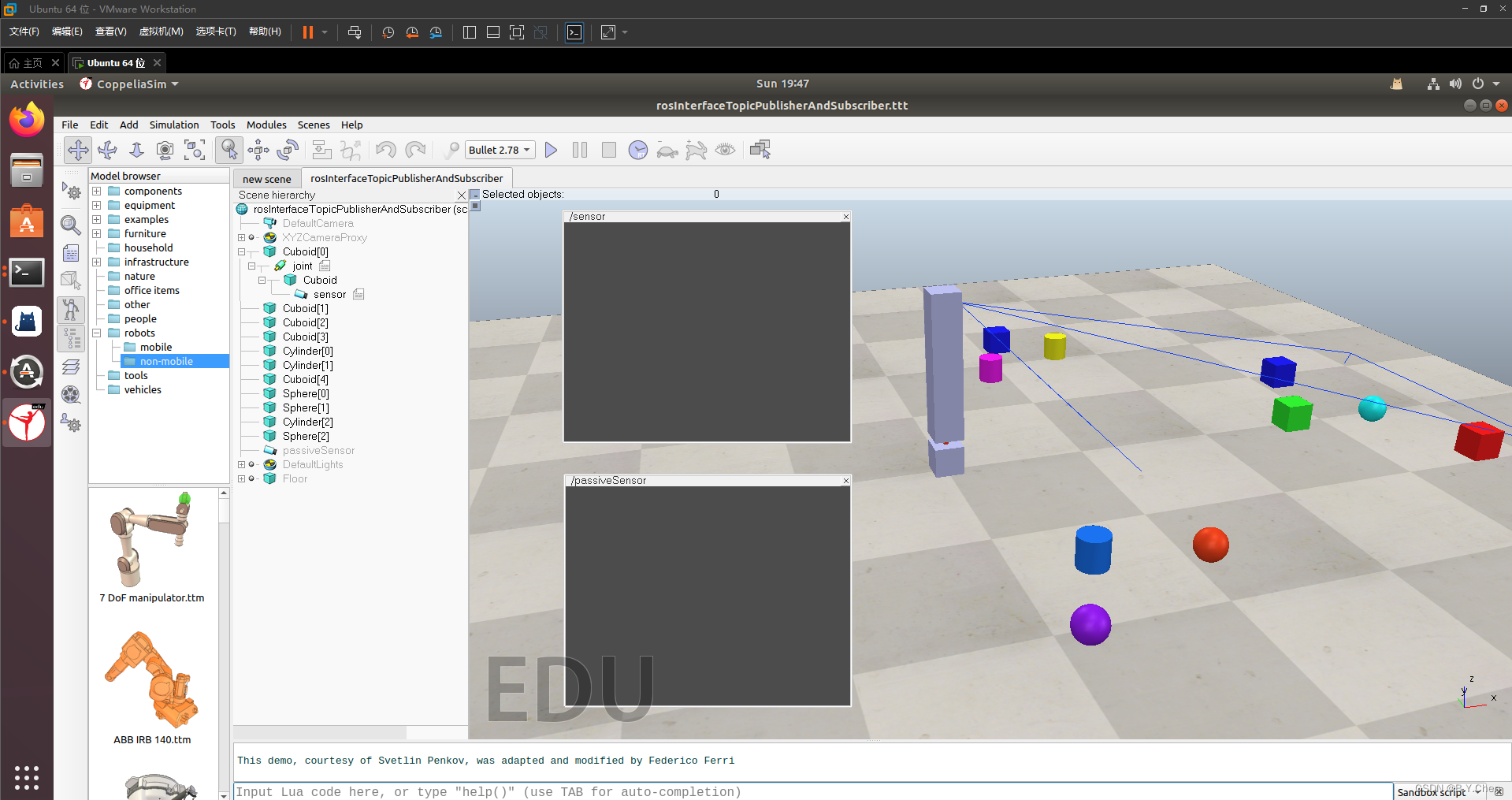
rostopic list
出现了topic /image,使用命令:
rosrun image_view image_view image:=/image #查看摄像头图像

测试由CoppeliaSim发布摄像头图像数据成功














 1718
1718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









