






 本文档介绍了如何下载和安装Coppeliasim仿真软件的Edu_V4.1版本,并解决安装过程中可能出现的问题。同时,详细阐述了Coppeliasim与ROS-Melodic的集成步骤,包括下载sim_ros_interface包,设置环境变量以及编译过程。在遇到错误时,提供了相应的解决方案,如修改usrset.txt文件和设置环境变量COPPELIASIM_ROOT_DIR。
本文档介绍了如何下载和安装Coppeliasim仿真软件的Edu_V4.1版本,并解决安装过程中可能出现的问题。同时,详细阐述了Coppeliasim与ROS-Melodic的集成步骤,包括下载sim_ros_interface包,设置环境变量以及编译过程。在遇到错误时,提供了相应的解决方案,如修改usrset.txt文件和设置环境变量COPPELIASIM_ROOT_DIR。
一、下载
之前一直用Gazebo、Rviz作仿真,看到了比较好用的Coppeliasim,今天就来安装试用以下
去官方网站下载对应的版本,我下载的是Edu_V 4.1版本,由于是外网所以我只下载了自己使用的版本(有需要的可以私信我帮下)
二、安装
下载完成后创建一个ROS的workspace,将Coppeliasim解压后,放至在此工作空间的src下
mkdir V_erp
cd V_erp
mkdir src完成上述操作后即可形成以下树状目录结构:
进入CoppeliaSim功能包下(我理解为功能包,当然解压的名字因为太长所以我改了),运行
./coppeliaSim.sh
即可打开软件,若出现闪现退现象,并出现黄标警告:
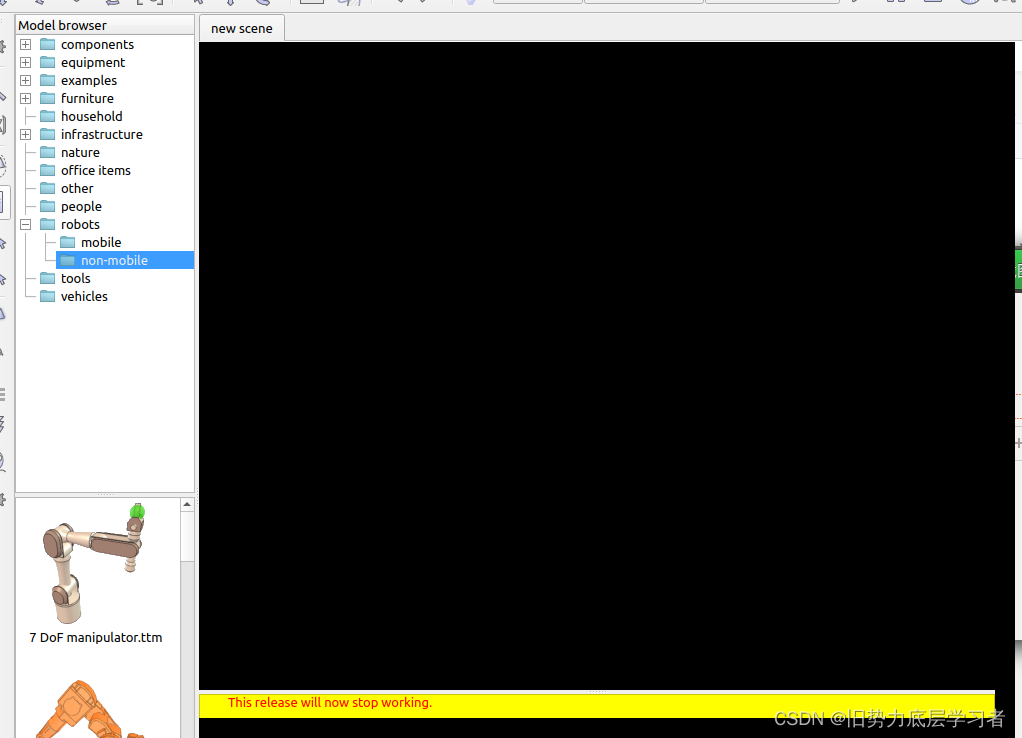
则打开CoppeliaSim目录下的system/usrset.txt文件,在最后一行添加:
allowOldEduRelease=7501重新启动即可正常打开。
三、与ROS-Melodic集成
首先在CoppeliaSim相同的目录下,即src下将sim_ros_interface进行下载:
git clone --recursive https://github.com/CoppeliaRobotics/simExtROSInterface.git sim_ros_interface进入该目录并进行检查:
cd sim_ros_interface
git checkout coppeliasim-v4.0.0然后返回创建好的Workspace进行编译:
cd ~/V_erp
catkin build -j4此时出现错误
[1]:catkin:未找到命令
解决方案:
sudo apt update
sudo apt install python-catkin-tools再次执行
[2]:[build] Error: Unable to find source space `/home/linux/src`
解决方案:
1-打开home,即点击桌面图表,按Ctrl+h查看隐藏目录
2-将.catkin_tools删除
[3]:Environment variable COPPELIASIM_ROOT_DIR is not set
解决方案:
打开~/.bashrc
将CoppeliaSim的功能包添加到环境中
sudo gedit ~/bashrc
//根据自己实际路径填写
export COPPELIASIM_ROOT_DIR=此时再进行下方命令即可编译成功,之后打开软件即可
catkin build -j4
测试与消息的联通就放到下一节了


















 6126
6126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









