







 本文介绍了物体在三维空间中的姿态表示方法,包括旋转矩阵、欧拉角和四元素。旋转矩阵具有任意旋转轴的优点,但计算量大;欧拉角直观易懂,但存在万向锁问题;四元素无万向锁,但理解难度较高。总结中推荐使用四元素来表示姿态。
本文介绍了物体在三维空间中的姿态表示方法,包括旋转矩阵、欧拉角和四元素。旋转矩阵具有任意旋转轴的优点,但计算量大;欧拉角直观易懂,但存在万向锁问题;四元素无万向锁,但理解难度较高。总结中推荐使用四元素来表示姿态。
物体姿态
物体在三维空间中的姿态、旋转,用旋转矩阵、欧拉角、四元素来表示。
旋转矩阵
旋转矩阵定义
旋转矩阵(英语:Rotation matrix)是在乘以一个向量的时候有改变向量的方向但不改变大小的效果并保持了手性的矩阵。(手性:左/右手坐标系)
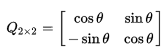
- 二维旋转矩阵表达式:
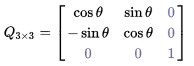
- 三维旋转矩阵表达式:
旋转矩阵优缺点
优点:旋转轴任意选择。
缺点:占用的内存空间大,计算量也大。
欧拉角
用来确定物体姿态,由章动角a、旋进角(即进动角)b和自转角r组成,如:(a,r,b)。
欧拉角定义
- 静态定义
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。
参阅下图。设定xyz-轴为参考系的参考轴。称xy-平面与XY-平面的相交为交点线,用英文字母(N)代表。zxz顺
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









