







 本文详细介绍了LIN帧收发的硬件实现,包括协议控制器、总线收发器、LIN总线、时钟源和EMI控制等方面。协议控制器基于UART/SCI,负责数据的转换和同步间隔段的产生。总线收发器则完成电平转换,确保信号在LIN总线上的稳定传输。LIN总线是连接所有节点的通信介质,而时钟源则决定了网络的时间基准。此外,文章还讨论了EMI控制,以降低电磁干扰。
本文详细介绍了LIN帧收发的硬件实现,包括协议控制器、总线收发器、LIN总线、时钟源和EMI控制等方面。协议控制器基于UART/SCI,负责数据的转换和同步间隔段的产生。总线收发器则完成电平转换,确保信号在LIN总线上的稳定传输。LIN总线是连接所有节点的通信介质,而时钟源则决定了网络的时间基准。此外,文章还讨论了EMI控制,以降低电磁干扰。
帧收发的硬件实现
目录
本章着重介绍与 LIN 帧收发相关的硬件的组成、特点以及应用设计时的注意事项。本章内容对应着 LIN 规范的以下部分:
● LIN Protocol Specification(部分内容)
● LIN Physical Layer Specification
一、组成
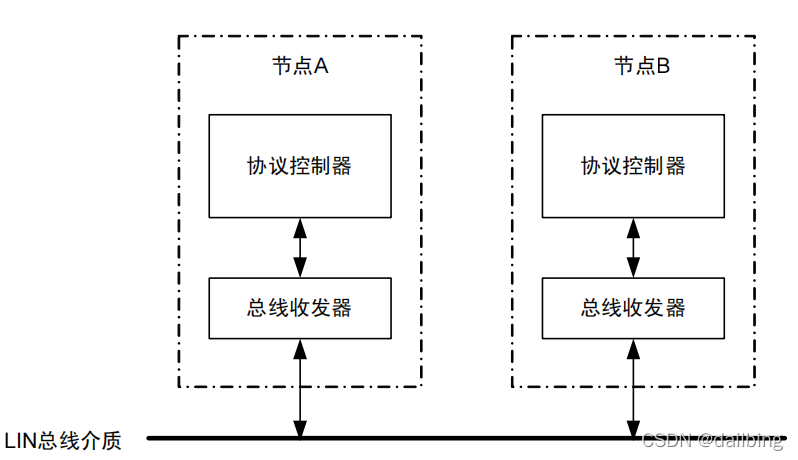
收发 LIN
帧需要的硬件包括
协议控制器(Protocol Controller)
、
总线收发器(Bus Transceiver)和 LIN 总线三部分
,如下图
所示。
LIN 规范并未限定传输介质的类型和连接器的规格。目前 LIN 网络主要使用铜线作为传输介质,针对铜线的总线收发器也是市场主流。
鉴于这种情况,下文如无特别说明,均是针对铜线介质展开。
二、协议控制器
1、协议控制器介绍
协议控制器的主体是一个基于 UART/SCI 的通信控制器,
工作方式是半双工
。协议控制器既可以使用专用模块实现,也可以用“UART/SCI+
定时器
”
实现。发送时,协议控制器把二进制并行数据转变成高
-
低电平信号,并按照
规定的串行格式(8 数据位,1 停止位,无校验位)
送往总线收发器;接收时,协议控制器把来自总线收发器的高-
低电平信号按照同样的串行格式储存下来,然后再将储存结果转换成二进制并行数据。
协议控制器要能产生和识别帧的同步间隔段。同步间隔段包含一个低电平脉冲,长度至少为13
位。发出和识别同步间隔段虽然增加了硬件设计的复杂度,但是从接收方的角度看,这样做能把同步间隔段与普通的数据字节区别开,确保了同步信息的特殊性。
协议控制器要能执行本地唤醒(Local Wakeup)
。需要唤醒总线时,协议控制器通过总线收发器向
LIN
总线送出唤醒信号
。
协议控制器要能识别总线唤醒(Bus Wakeup)
。当收到来自
LIN
总线的唤醒信号时,协议控制器能够正确动作,进入规定的通信状态(
注
1)
。
注:
1.
例如,主机节点延迟
100ms
,然后查询唤醒来源。
2、实现方法
依据硬件资源不同可以分为 3
类:
UART/SCI+
定时器+
外部中断、硬件
LIN(Hardware LIN)和 LIN 模块
(LIN Module),分别面向对成本和性能有不同侧重的应用。
三、总线收发器
总线收发器的主体
是一个双向工作的电平转换器
,
完成协议控制器的高-低电平与 LIN 总线的隐性-显性电平(注 1)之间的转换。
显性
-
隐性电平的定义如下表
所示。

LIN 规范规定:
LIN 总线的电平参考点是总线收发器的电源参考点。
为了克服电源波动和参考点漂移的影响,
LIN 规范要求总线收发器要能承受±11.5%的电源波动和参考点电平波动,并且能承受电源和参考点之间 8%的电位差波动。
收发双方的电平鉴别门限也设置了较大的冗余度。
总线收发器还包括一些附加的功能,例如总线阻抗匹配、压摆率(Slew-rate)
控制等。此外,LIN
规范要求总线收发器具备这样一种特性:
本地节点掉电或工作异常时,不能影响总线上其他节点工作。
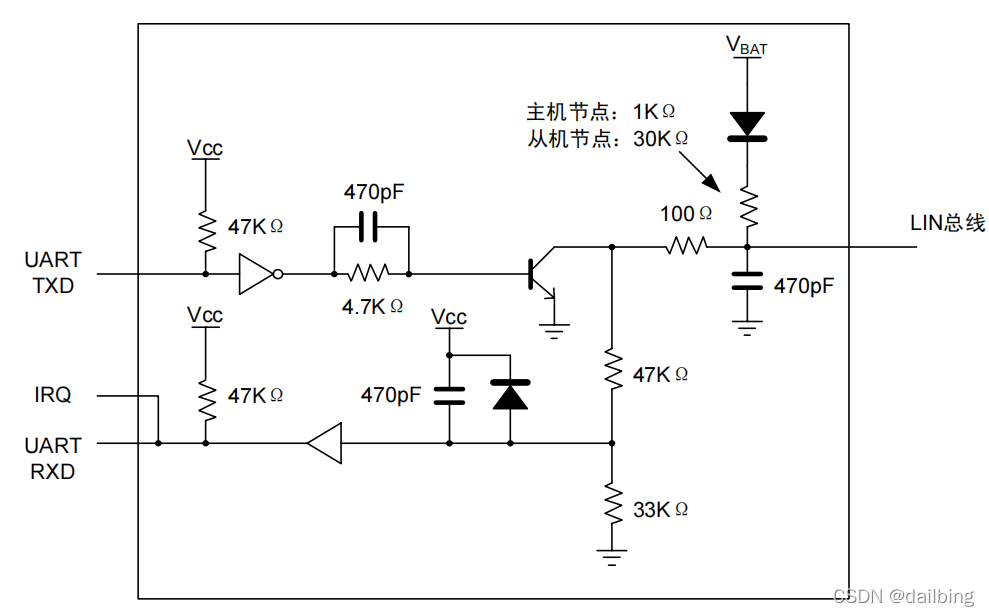
1、实现方案
在一些要求不高的场合,可以采用简单的收发器电路,如下图
所示。
2、采用IC厂家的集成方案
不少半导体厂商提供集成化的总线收发器,这些产品功能完善,环境适应能力强,设计产品时建议优先考虑。
四、LIN 总线
LIN 总线是衔接所有
LIN
节点的通信介质。
LIN 总线的特征阻抗
——
尤其是容抗
——
会影响信号的波形,在设计产品时应予以重视
。
为汽车电子产品增加 LIN
功能所花费的成本与获得的灵活性相比,往往后者更为显著。汽车上大多数传感器、执行器除至少要接 1
根电源线和
1
根地线外,此外还有一些模拟
/
数字信号线,这些接口往往存在兼容性的问题。如果采用 LIN
规范,仅用
3
根线
(
电源、地和
LIN)
就可以实现标准化的数字接口。传感器、执行器通过总线连接,汽车结构设计可以更加灵活,线束的数量(
重量
)
不但不会增加,还可能减少。
五、时钟源
LIN 网络的主机节点必须设置较高精度的时钟,而从机节点则不必。
换句话说,主机节点是
LIN
网络的时间基准,这保证了位速率的准确性。LIN
规范规定一个
LIN
网络里只有一个主机节点,这保证了位速率的唯一性。LIN
规范规定所有通信都由主机节点发起,并在帧头中加入同步段,这就给从机节点提供了主机节点位速率的信息。只要所有从机节点都能在 LIN
通信时与主机节点采用同样的位速率,
LIN
网络就能正常工作。这种做法虽然降低了传输效率,但是一方面减少了高精度时钟数量,降低了成本;另一方面不需要仲裁,降低了软硬件设计复杂度。
主机节点、从机节点位速率要满足下表
的要求。
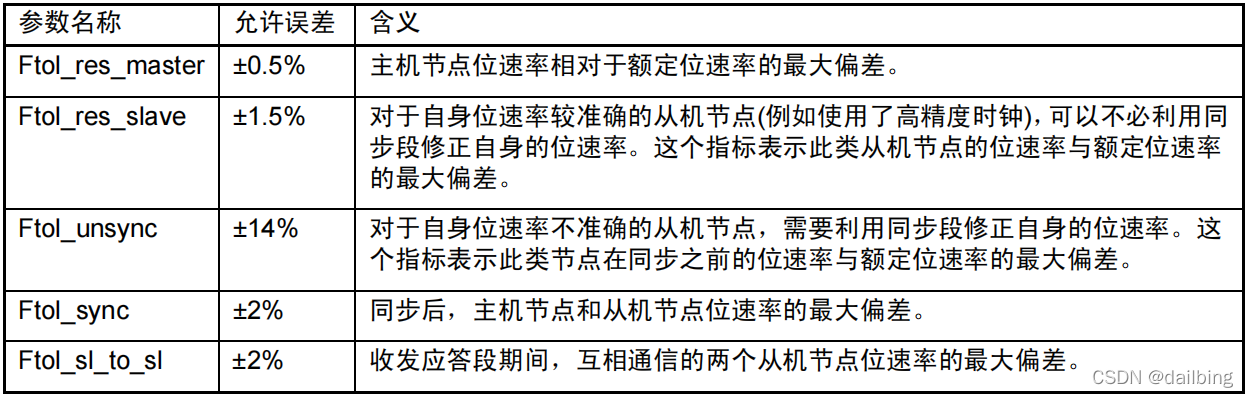
●
主机节点、从机节点的位速率必须在使用环境要求的温度范围和电压范围内,优于规定的精度
(
主机节点是±0.5%
,从机节点是
±14%)
。
●
同步之前,主机和从机节点的位速率与额定位速率的误差应符合
Ftol_res_master
和 Ftol_res_slave/Ftol_unsync 的要求。主机节点按主机位速率发出同步间隔段,从机节点应可按从机位速率将其解释为长度大于 9
~
11
位的显性电平
(
这个宽度必须是帧的其他部分不可能出现的
)
。这里除了要考虑从机节点对时间的测量误差(
取决于时钟精度
)
,还要考虑从机节点可用位速率与额定位速率的误差,以及 LIN
总线电抗特性造成的传输延迟
(
固有误差,取决于硬件设计
)
。
●
同步之后,从
PID
段到校验和段,通信双方的位速率相对误差不大于
±2%(
即
Ftol_sync
和
Ftol_sl_to_sl)
。如果是主机节点与从机节点通信,设 Ftol_res_master
为
±0.5%
,那么不论从机节点是否利用同步段修正位速率,其位速率相对于额定位速率的误差不能大于 Ftol_sync - Ftol_res_master
,即
±1.5%
。如果是从机节点之间通信,对从机节点各自的位速率误差的要求将高于±1.5%
。
六、EMI 及其控制
EMI 这里指电磁干扰。对于
LIN
而言,
EMI
主要由位速率和压摆率共同决定。位速率决定单位时间内电平变化次数,压摆率决定电平跳变的快慢。单位时间内跳变次数越多,每次跳变持续时间越短,跳变过程包含的谐波成分就越丰富,EMI
也越大;相反,跳变持续时间越长,单位时间跳变次数越少,其谐波成分越少,
EMI也较低。
LIN 可以控制 EMI。这是因为协议控制器可以控制 LIN 总线位速率,总线收发器可以控制压摆率。
另外,LIN 协会把
LIN
的最高位速率限制在
20kbps
。值得一提的是,这个速度远非
LIN
物理层的极限,而是在数据速率与 EMI
之间权衡的结果。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









