






 IDF1Score是一种用于评估多目标追踪(MOT)中目标身份识别准确性的指标,结合TruePositiveID、FalsePositiveID、FalseNegativeID和TrueNegativeID四个关键指标计算。它衡量模型在追踪过程中的身份保持能力。
IDF1Score是一种用于评估多目标追踪(MOT)中目标身份识别准确性的指标,结合TruePositiveID、FalsePositiveID、FalseNegativeID和TrueNegativeID四个关键指标计算。它衡量模型在追踪过程中的身份保持能力。
IDF1(Identity F1 Score)是一种用于评估多目标追踪(MOT)性能的指标。它是目标追踪任务中的一个重要性能度量,用于衡量模型在追踪过程中保持追踪目标身份的准确性。即正确识别的检测与平均真实数和计算检测数之比。
IDF1公式如下
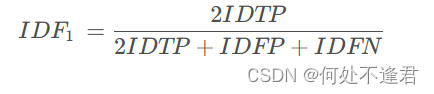
IDF1 综合了以下几个关键指标:
-
IDTP (True Positive ID):表示正确匹配的目标身份,即将真实目标与跟踪结果正确匹配的情况。
-
IDFP (False Positive ID):表示错误匹配的目标身份,即将真实目标与跟踪结果错误匹配的情况。
-
IDFN (False Negative ID):表示未匹配到的真实目标身份,即未将真实目标与任何跟踪结果匹配的情况。
-
IDTN (True Negative ID):表示正确未匹配的目标身份,即未将真实目标与跟踪结果匹配且没有错误匹配的情况。
计算方法
-
计算 True Positive IDs (IDTP):表示正确匹配的目标身份数量,即将真实目标与跟踪结果正确匹配的数量。
-
计算 False Positive IDs (IDFP):表示错误匹配的目标身份数量,即将真实目标与跟踪结果错误匹配的数量。
-
计算 False Negative IDs (IDFN):表示未匹配到的真实目标身份数量,即未将真实目标与任何跟踪结果匹配的数量。
-
使用上述计算结果,根据公式计算 IDF1 分数。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









