







单片机对步进电机的控制(二)
——步进电机的控制原理
通过第一篇的文章介绍我们知道,通过一系列的激励会使步进电机旋转,接下来我们所要做的就是通过设计硬件实现所需的步进序列。一块能让电机动起来的硬件(或结合了硬件和软件的设备)就叫做电机驱动器。
一、双极电机的驱动原理
双极电机的示意图如图1所示:
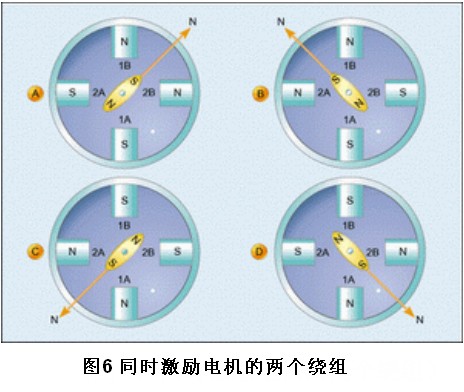
图6中我们可以看出怎样激励双相电机的绕组才能使电机转子旋转。如图6,我们预先将电机内的绕组抽头分别标为1A、1B、2A和2B。其中,1A和1B是绕组1的两个抽头,2A和2B则是绕组2的两个抽头。
首先,要给脚1B和2B施加一个正电压,并将1A和2A接地。然后,给脚1B和2A施加一个正电压,而将1A和2B接地,这一过程其实取决于导线绕齿槽缠绕的方向吗,假设导线缠绕的方向与我们之前说过的相符。依次激励下去,我们就得到了表1中总结的激励顺序,其中,"1"代表正电压,"0"代表接地。

电流在电机绕组中有两种可能的流向,这样的电机就叫做双极电机和双极驱动序列。双极电机通常由一种叫做H桥的电路驱动,如图3所示。图3给出了连接H桥和步进电机两根抽头的电路。H桥通过一个电阻连接到一个电压固定的直流电源(其幅度可根据要求选取),然后,该电机再经过4个开关(分别标为S1、S2、S3、S4)连接到绕组的两根抽头。

使用一对H桥电路就能产生需要的激励信号序列。根据表1,我们可以得出如表2所示的在整个激励过程中开关所在位置。

【注意,在该电路中电阻R是不能缺少的】
二、单极电机驱动原理

在单极电机中,我们能够接触到的只有每隔绕组的中心抽头,如图1所示。我们将从绕组顶部抽出的抽头表为B,底部抽出的表为抽头A,中间的为抽头C。
如果遇到一些抽头没有标注的电机,只要我们清楚步进电机的构造,就很容易通过测量抽头之间的阻值,识别出哪些属于哪根绕组。不同绕组的抽头之间阻抗通常为无穷大。如果经测量,抽头A和C之间的阻抗为100Ω,那么抽头B和C之间的阻抗也应该是100Ω,而A和B之间的阻抗为200Ω。其中200Ω这一阻值叫做绕组阻抗。

图2给出了一个单极电机的单相驱动电路。从中可以看出,当S1闭合而S2断开时,电流将由右至左流经电机绕组;而当S1断开,S2闭合时,电流流向变为由左至右。因此,我们仅用两个开关就能改变电流的流向。
虽然单极电机的驱动器控制起来相对简单,但由于在电机中使用了中心抽头,因此它比双极电机更复杂。此外,因为电流只流经一半的电机绕组,所以单极电机只能产生一半的磁场。
在知道了单极电机和双极电机的构造原理之后,当我们遇到一个没有标识抽头也没有数据手册的电机时,我们就能自己推导出抽头和绕组的关系。带4个抽头的电机就是一个双相双极电机,我们可以通过测量导线之间的阻抗来分辨哪两个抽头属于同一绕组。带6个抽头的电机可能是一个双相单极电机,也可能是一个三相双极电机,具体情况可以通过测量导线之间的阻抗来确定。
三、微处理器控制步进电机
电机的控制除了采用全硬件方案实现以外,也可以用微控制器或DSP实现。图4说明了如何利用晶体管为开关来控制双相单极电机。每个晶体管的基极都要通过一个电阻连接到微控制器的一个数字输出上,阻值可以从1到10M欧姆,用于限制流入晶体管基极的电流。每个晶体管的发射极均接地,集电极的电机绕组的4个抽头。电机的中心抽头均连接到电源电压的正端。

每个晶体管的集电极均通过一个二极管连接到电压源,以保护晶体管不被旋转时电机绕组上的感应电流烧坏。转子旋转时,电机绕组上会出现一个感应电压,如果晶体管集电极没有通过二极管连接到电压源,感应电压造成的电流就会涌入晶体管的集电极。
一旦清楚了驱动电机所需的硬件和数字输出的顺序,我们就可以对最顺手的微控制器或DSP编写软件,实现这些序列。
整理人:卢阳
时间:2010-03-03
QQ:1341679830















 2708
2708

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









