









本篇博客为博主学习使用MPU6500完成后的学习记录,故在这只做主要讲解,如有博友看完后仍不知如何使用,可在下方留言问我,或发邮件问我(dayou1024@qq.com),因邮件有QQ和微信提示,故我能更快看到.
工程代码及开发资料下载连接:https://download.csdn.net/download/dayou1024/12589762
1、MPU6500/MPU6050是一个6轴的传感器,及加速度和角速度各有 x,y,z轴
相关数据手册可在网上找到,如立创商城
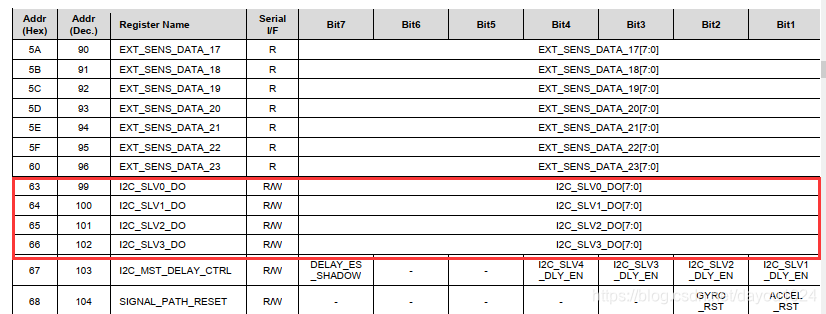
2、我这里使用I2C总线驱动MPU6500,要想后面的程序能调通,首先要确保I2C连续读写都正确,能读写MPU6500一两个寄存器正确并不能说明你的I2C一定是可靠了的,因为后面要用到官方给的函数库,这些库要大量连续读写数据。检验你的I2C是否可靠,可能这样操作:
MPU6500中有以下四个寄存器,可读可写,且它自己不会往里写数据,我们可以连续往这写入四个字节,再读出,读出写入一样说明I2C可靠。
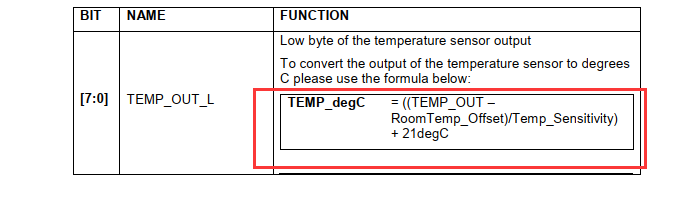
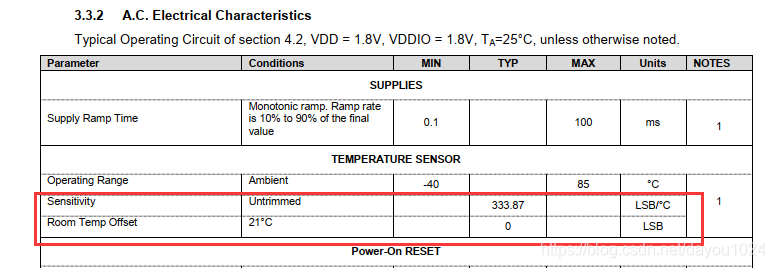
DMP库自带的获取6500温度函数是不对的,我们可以参考数据手册自己写
3、我们从MPU6500的寄存器中出来的加速度和角速度值,意义是不大的,主要是想得到欧拉角,但我们自己通过加速度和角速度来计算欧拉角是很麻烦的,官方给了一个DMP解算例程,例程中的core文件夹包含了库函数文件
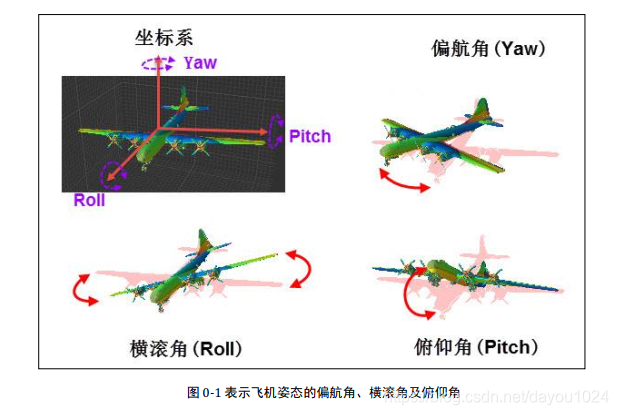
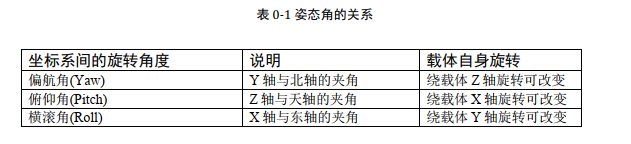
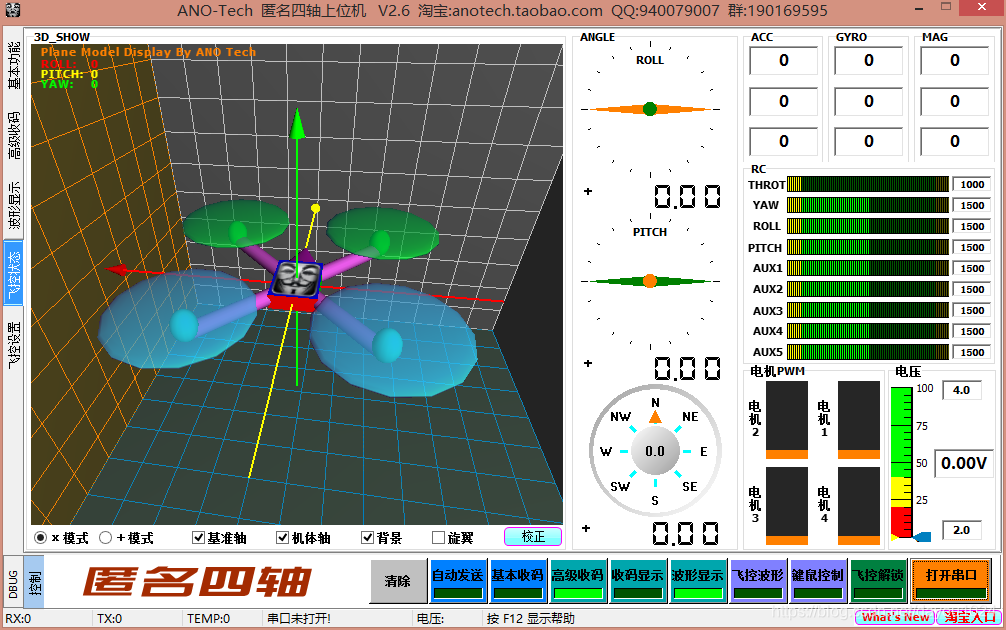
我们通过DMP函数得能这些角度数据后,用串口发送数据到“匿名四轴”2.6版上位机,可得到3D姿态图
5.1版本解算库包含以下几个文件,比6.12版轻量,适合小工程

我们需要修改两个C文件和inv_mpu.h文件,改动很小,只改到一些宏定义
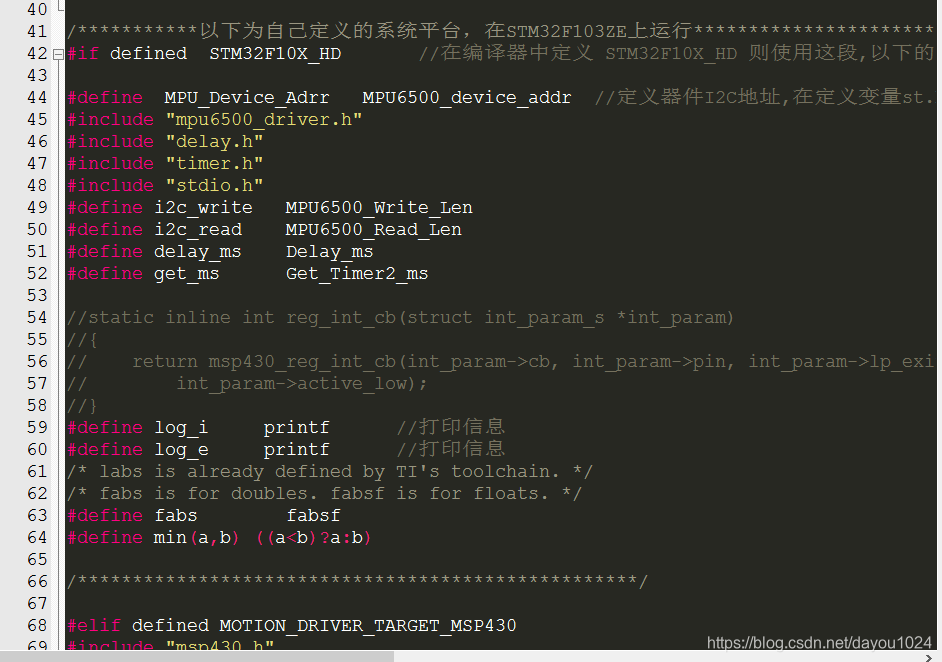
为了尽量减少改动,inv_mpu_dmp_motion_driver.c 文件只需在头部加上自己的宏定义
inv_mpu_dmp_motion_driver.c 改动:
这段宏定义也是照搬文件下面的,Delay_ms函数提供给DMP库用于毫秒级延时,Get_Timer2_ms函数是毫秒计时,这两个函数要我们写出,printf是DMP库在使用串口输出一些提示信息
inv_mpu.c改动:
这里也是照着文件下面添加的,MPU6500_Write_Len 和 MPU6500_Read_Len函数是DMP库在操作MPU6500时要用的,由我们写一个函数提供给它,函数的形式在文件头部有说明, fsbsf是C编译器的函数库,不用我们写,把math.h头文件包含进去就可以。
inv_mpu.h改动
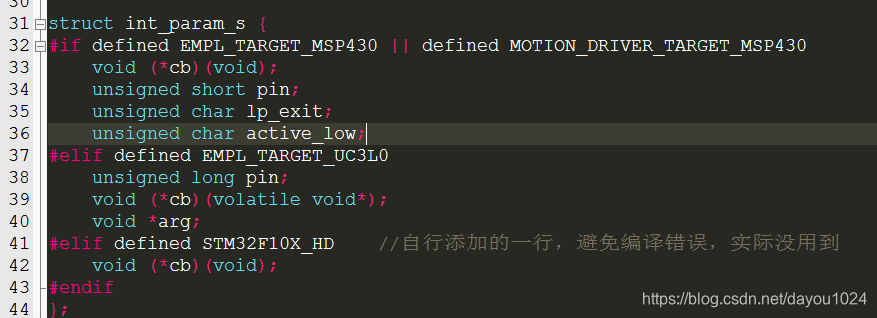
这里只用加上41和42这两行,其实在函数中实际上也用不到
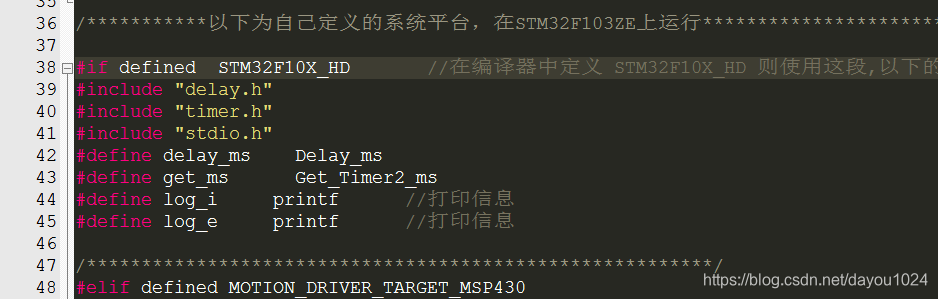
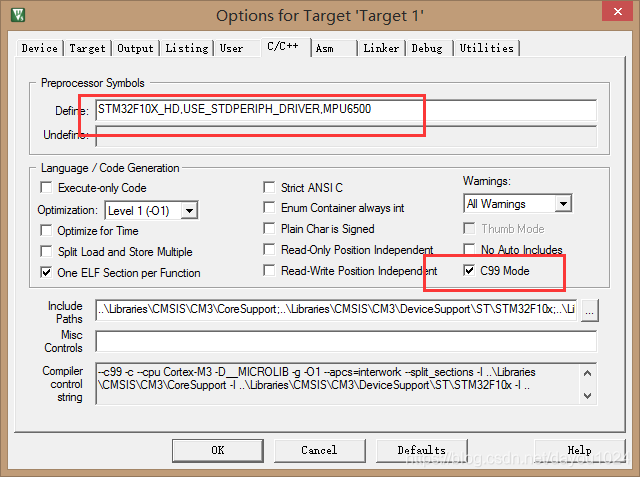
4,在配置MDK开发环境时,要定义STM32F10X_HD和MPU6500,当然地,也可以在文件中定义,因我为用的平台是STM32F103,所以我定义成这个,也可以定义成你自己的开发平台。
同时还要勾选使用C99标准,因为DMP库中有些语法C99才支持
以下是主要的驱动代码,关于STM32的引脚配置就不放上来了
1,首先是官方给的5.1版本DMP函数库,
(1)inv_mpu_dmp_motion_driver.c
/*
$License:
Copyright (C) 2011-2012 InvenSense Corporation, All Rights Reserved.
See included License.txt for License information.
$
*/
/**
* @addtogroup DRIVERS Sensor Driver Layer
* @brief Hardware drivers to communicate with sensors via I2C.
*
* @{
* @file inv_mpu_dmp_motion_driver.c
* @brief DMP image and interface functions.
* @details All functions are preceded by the dmp_ prefix to
* differentiate among MPL and general driver function calls.
*/
#include <stdio.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "dmpKey.h"
#include "dmpmap.h"
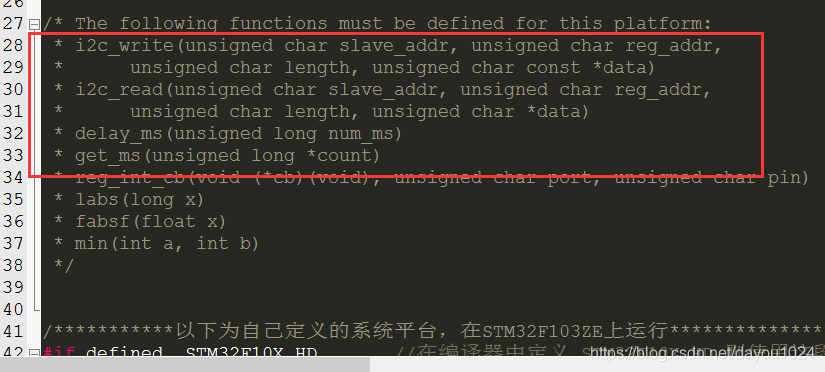
/* The following functions must be defined for this platform:
* i2c_write(unsigned char slave_addr, unsigned char reg_addr,
* unsigned char length, unsigned char const *data)
* i2c_read(unsigned char slave_addr, unsigned char reg_addr,
* unsigned char length, unsigned char *data)
* delay_ms(unsigned long num_ms)
* get_ms(unsigned long *count)
*/
/***********以下为自己定义的系统平台,在STM32F103ZE上运行***************************/
#if defined STM32F10X_HD //在编译器中定义 STM32F10X_HD 则使用这段,以下的系统平台将不会用到
#include "delay.h"
#include "timer.h"
#include "stdio.h"
#define delay_ms Delay_ms
#define get_ms Get_Timer2_ms
#define log_i printf //打印信息
#define log_e printf //打印信息
/*********************************************************/
#elif defined MOTION_DRIVER_TARGET_MSP430
#include "msp430.h"
#include "msp430_clock.h"
#define delay_ms msp430_delay_ms
#define get_ms msp430_get_clock_ms
#define log_i(...) do {} while (0)
#define log_e(...) do {} while (0)
#elif defined EMPL_TARGET_MSP430
#include "msp430.h"
#include "msp430_clock.h"
#include "log.h"
#define delay_ms msp430_delay_ms
#define get_ms msp430_get_clock_ms
#define log_i MPL_LOGI
#define log_e MPL_LOGE
#elif defined EMPL_TARGET_UC3L0
/* Instead of using the standard TWI driver from the ASF library, we're using
* a TWI driver that follows the slave address + register address convention.
*/
#include "delay.h"
#include "sysclk.h"
#include "log.h"
#include "uc3l0_clock.h"
/* delay_ms is a function already defined in ASF. */
#define get_ms uc3l0_get_clock_ms
#define log_i MPL_LOGI
#define log_e MPL_LOGE
#else
#error Gyro driver is missing the system layer implementations.
#endif
/* These defines are copied from dmpDefaultMPU6050.c in the general MPL
* releases. These defines may change for each DMP image, so be sure to modify
* these values when switching to a new image.
*/
#define CFG_LP_QUAT (2712)
#define END_ORIENT_TEMP (1866)
#define CFG_27 (2742)
#define CFG_20 (2224)
#define CFG_23 (2745)
#define CFG_FIFO_ON_EVENT (2690)
#define END_PREDICTION_UPDATE (1761)
#define CGNOTICE_INTR (2620)
#define X_GRT_Y_TMP (1358)
#define CFG_DR_INT (1029)
#define CFG_AUTH (1035)
#define UPDATE_PROP_ROT (1835)
#define END_COMPARE_Y_X_TMP2 (1455)
#define SKIP_X_GRT_Y_TMP (1359)
#define SKIP_END_COMPARE (1435)
#define FCFG_3 (1088)
#define FCFG_2 (1066)
#define FCFG_1 (1062)
#define END_COMPARE_Y_X_TMP3 (1434)
#define FCFG_7 (1073)
#define FCFG_6 (1106)
#define FLAT_STATE_END (1713)
#define SWING_END_4 (1616)
#define SWING_END_2 (1565)
#define SWING_END_3 (1587)
#define SWING_END_1 (1550)
#define CFG_8 (2718)
#define CFG_15 (2727)
#define CFG_16 (2746)
#define CFG_EXT_GYRO_BIAS (1189)
#define END_COMPARE_Y_X_TMP (1407)
#define DO_NOT_UPDATE_PROP_ROT (1839)
#define CFG_7 (1205)
#define FLAT_STATE_END_TEMP (1683)
#define END_COMPARE_Y_X (1484)
#define SKIP_SWING_END_1 (1551)
#define SKIP_SWING_END_3 (1588)
#define SKIP_SWING_END_2 (1566)
#define TILTG75_START (1672)
#define CFG_6 (2753)
#define TILTL75_END (1669)
#define END_ORIENT (1884)
#define CFG_FLICK_IN (2573)
#define TILTL75_START (1643)
#define CFG_MOTION_BIAS (1208)
#define X_GRT_Y (1408)
#define TEMPLABEL (2324)
#define CFG_ANDROID_ORIENT_INT (1853)
#define CFG_GYRO_RAW_DATA (2722)
#define X_GRT_Y_TMP2 (1379)
#define D_0_22 (22+512)
#define D_0_24 (24+512)
#define D_0_36 (36)
#define D_0_52 (52)
#define D_0_96 (96)
#define D_0_104 (104)
#define D_0_108 (108)
#define D_0_163 (163)
#define D_0_188 (188)
#define D_0_192 (192)
#define D_0_224 (224)
#define D_0_228 (228)
#define D_0_232 (232)
#define D_0_236 (236)
#define D_1_2 (256 + 2)
#define D_1_4 (256 + 4)
#define D_1_8 (256 + 8)
#define D_1_10 (256 + 10)
#define D_1_24 (256 + 24)
#define D_1_28 (256 + 28)
#define D_1_36 (256 + 36)
#define D_1_40 (256 + 40)
#define D_1_44 (256 + 44)
#define D_1_72 (256 + 72)
#define D_1_74 (256 + 74)
#define D_1_79 (256 + 79)
#define D_1_88 (256 + 88)
#define D_1_90 (256 + 90)
#define D_1_92 (256 + 92)
#define D_1_96 (256 + 96)
#define D_1_98 (256 + 98)
#define D_1_106 (256 + 106)
#define D_1_108 (256 + 108)
#define D_1_112 (256 + 112)
#define D_1_128 (256 + 144)
#define D_1_152 (256 + 12)
#define D_1_160 (256 + 160)
#define D_1_176 (256 + 176)
#define D_1_178 (256 + 178)
#define D_1_218 (256 + 218)
#define D_1_232 (256 + 232)
#define D_1_236 (256 + 236)
#define D_1_240 (256 + 240)
#define D_1_244 (256 + 244)
#define D_1_250 (256 + 250)
#define D_1_252 (256 + 252)
#define D_2_12 (512 + 12)
#define D_2_96 (512 + 96)
#define D_2_108 (512 + 108)
#define D_2_208 (512 + 208)
#define D_2_224 (512 + 224)
#define D_2_236 (512 + 236)
#define D_2_244 (512 + 244)
#define D_2_248 (512 + 248)
#define D_2_252 (512 + 252)
#define CPASS_BIAS_X (35 * 16 + 4)
#define CPASS_BIAS_Y (35 * 16 + 8)
#define CPASS_BIAS_Z (35 * 16 + 12)
#define CPASS_MTX_00 (36 * 16)
#define CPASS_MTX_01 (36 * 16 + 4)
#define CPASS_MTX_02 (36 * 16 + 8)
#define CPASS_MTX_10 (36 * 16 + 12)
#define CPASS_MTX_11 (37 * 16)
#define CPASS_MTX_12 (37 * 16 + 4)
#define CPASS_MTX_20 (37 * 16 + 8)
#define CPASS_MTX_21 (37 * 16 + 12)
#define CPASS_MTX_22 (43 * 16 + 12)
#define D_EXT_GYRO_BIAS_X (61 * 16)
#define D_EXT_GYRO_BIAS_Y (61 * 16) + 4
#define D_EXT_GYRO_BIAS_Z (61 * 16) + 8
#define D_ACT0 (40 * 16)
#define D_ACSX (40 * 16 + 4)
#define D_ACSY (40 * 16 + 8)
#define D_ACSZ (40 * 16 + 12)
#define FLICK_MSG (45 * 16 + 4)
#define FLICK_COUNTER (45 * 16 + 8)
#define FLICK_LOWER (45 * 16 + 12)
#define FLICK_UPPER (46 * 16 + 12)
#define D_AUTH_OUT (992)
#define D_AUTH_IN (996)
#define D_AUTH_A (1000)
#define D_AUTH_B (1004)
#define D_PEDSTD_BP_B (768 + 0x1C)
#define D_PEDSTD_HP_A (768 + 0x78)
#define D_PEDSTD_HP_B (768 + 0x7C)
#define D_PEDSTD_BP_A4 (768 + 0x40)
#define D_PEDSTD_BP_A3 (768 + 0x44)
#define D_PEDSTD_BP_A2 (768 + 0x48)
#define D_PEDSTD_BP_A1 (768 + 0x4C)
#define D_PEDSTD_INT_THRSH (768 + 0x68)
#define D_PEDSTD_CLIP (768 + 0x6C)
#define D_PEDSTD_SB (768 + 0x28)
#define D_PEDSTD_SB_TIME (768 + 0x2C)
#define D_PEDSTD_PEAKTHRSH (768 + 0x98)
#define D_PEDSTD_TIML (768 + 0x2A)
#define D_PEDSTD_TIMH (768 + 0x2E)
#define D_PEDSTD_PEAK (768 + 0X94)
#define D_PEDSTD_STEPCTR (768 + 0x60)
#define D_PEDSTD_TIMECTR (964)
#define D_PEDSTD_DECI (768 + 0xA0)
#define D_HOST_NO_MOT (976)
#define D_ACCEL_BIAS (660)
#define D_ORIENT_GAP (76)
#define D_TILT0_H (48)
#define D_TILT0_L (50)
#define D_TILT1_H (52)
#define D_TILT1_L (54)
#define D_TILT2_H (56)
#define D_TILT2_L (58)
#define D_TILT3_H (60)
#define D_TILT3_L (62)
#define DMP_CODE_SIZE (3062)
static const unsigned char dmp_memory[DMP_CODE_SIZE] = {
/* bank # 0 */
0x00, 0x00, 0x70, 0x00, 0x00, 0x00, 0x00, 0x24, 0x00, 0x00, 0x00, 0x02, 0x00, 0x03, 0x00, 0x00,
0x00, 0x65, 0x00, 0x54, 0xff, 0xef, 0x00, 0x00, 0xfa, 0x80, 0x00, 0x0b, 0x12, 0x82, 0x00, 0x01,
0x03, 0x0c, 0x30, 0xc3, 0x0e, 0x8c, 0x8c, 0xe9, 0x14, 0xd5, 0x40, 0x02, 0x13, 0x71, 0x0f, 0x8e,
0x38, 0x83, 0xf8, 0x83, 0x30, 0x00, 0xf8, 0x83, 0x25, 0x8e, 0xf8, 0x83, 0x30, 0x00, 0xf8, 0x83,
0xff, 0xff, 0xff, 0xff, 0x0f, 0xfe, 0xa9, 0xd6, 0x24, 0x00, 0x04, 0x00, 0x1a, 0x82, 0x79, 0xa1,
0x00, 0x00, 0x00, 0x3c, 0xff, 0xff, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x38, 0x83, 0x6f, 0xa2,
0x00, 0x3e, 0x03, 0x30, 0x40, 0x00, 0x00, 0x00, 0x02, 0xca, 0xe3, 0x09, 0x3e, 0x80, 0x00, 0x00,
0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00,
0x00, 0x0c, 0x00, 0x00, 0x00, 0x0c, 0x18, 0x6e, 0x00, 0x00, 0x06, 0x92, 0x0a, 0x16, 0xc0, 0xdf,
0xff, 0xff, 0x02, 0x56, 0xfd, 0x8c, 0xd3, 0x77, 0xff, 0xe1, 0xc4, 0x96, 0xe0, 0xc5, 0xbe, 0xaa,
0x00, 0x00, 0x00, 0x00, 0xff, 0xff, 0x0b, 0x2b, 0x00, 0x00, 0x16, 0x57, 0x00, 0x00, 0x03, 0x59,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1d, 0xfa, 0x00, 0x02, 0x6c, 0x1d, 0x00, 0x00, 0x00, 0x00,
0x3f, 0xff, 0xdf, 0xeb, 0x00, 0x3e, 0xb3, 0xb6, 0x00, 0x0d, 0x22, 0x78, 0x00, 0x00, 0x2f, 0x3c,
0x00, 0x00, 0x00, 0x00, 0x00, 0x19, 0x42, 0xb5, 0x00, 0x00, 0x39, 0xa2, 0x00, 0x00, 0xb3, 0x65,
0xd9, 0x0e, 0x9f, 0xc9, 0x1d, 0xcf, 0x4c, 0x34, 0x30, 0x00, 0x00, 0x00, 0x50, 0x00, 0x00, 0x00,
0x3b, 0xb6, 0x7a, 0xe8, 0x00, 0x64, 0x00, 0x00, 0x00, 0xc8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
/* bank # 1 */
0x10, 0x00, 0x00, 0x00, 0x10, 0x00, 0xfa, 0x92, 0x10, 0x00, 0x22, 0x5e, 0x00, 0x0d, 0x22, 0x9f,
0x00, 0x01, 0x00, 0x00, 0x00, 0x32, 0x00, 0x00, 0xff, 0x46, 0x00, 0x00, 0x63, 0xd4, 0x00, 0x00,
0x10, 0x00, 0x00, 0x00, 0x04, 0xd6, 0x00, 0x00, 0x04, 0xcc, 0x00, 0x00, 0x04, 0xcc, 0x00, 0x00,
0x00, 0x00, 0x10, 0x72, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x06, 0x00, 0x02, 0x00, 0x05, 0x00, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x64, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x05, 0x00, 0x05, 0x00, 0x64, 0x00, 0x20, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x03, 0x00,
0x00, 0x00, 0x00, 0x32, 0xf8, 0x98, 0x00, 0x00, 0xff, 0x65, 0x00, 0x00, 0x83, 0x0f, 0x00, 0x00,
0xff, 0x9b, 0xfc, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0xb2, 0x6a, 0x00, 0x02, 0x00, 0x00,
0x00, 0x01, 0xfb, 0x83, 0x00, 0x68, 0x00, 0x00, 0x00, 0xd9, 0xfc, 0x00, 0x7c, 0xf1, 0xff, 0x83,
0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x00, 0x00, 0x64, 0x03, 0xe8, 0x00, 0x64, 0x00, 0x28,
0x00, 0x00, 0x00, 0x25, 0x00, 0x00, 0x00, 0x00, 0x16, 0xa0, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00,
0x00, 0x00, 0x10, 0x00, 0x00, 0x2f, 0x00, 0x00, 0x00, 0x00, 0x01, 0xf4, 0x00, 0x00, 0x10, 0x00,
/* bank # 2 */
0x00, 0x28, 0x00, 0x00, 0xff, 0xff, 0x45, 0x81, 0xff, 0xff, 0xfa, 0x72, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x00, 0x05, 0x00, 0x05, 0xba, 0xc6, 0x00, 0x47, 0x78, 0xa2,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x14,
0x00, 0x00, 0x25, 0x4d, 0x00, 0x2f, 0x70, 0x6d, 0x00, 0x00, 0x05, 0xae, 0x00, 0x0c, 0x02, 0xd0,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x1b, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x64, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x1b, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0e, 0x00, 0x0e,
0x00, 0x00, 0x0a, 0xc7, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x32, 0xff, 0xff, 0xff, 0x9c,
0x00, 0x00, 0x0b, 0x2b, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x64,
0xff, 0xe5, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
/* bank # 3 */
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x01, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x24, 0x26, 0xd3,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x10, 0x00, 0x96, 0x00, 0x3c,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x0c, 0x0a, 0x4e, 0x68, 0xcd, 0xcf, 0x77, 0x09, 0x50, 0x16, 0x67, 0x59, 0xc6, 0x19, 0xce, 0x82,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x17, 0xd7, 0x84, 0x00, 0x03, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc7, 0x93, 0x8f, 0x9d, 0x1e, 0x1b, 0x1c, 0x19,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x03, 0x18, 0x85, 0x00, 0x00, 0x40, 0x00,
0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x67, 0x7d, 0xdf, 0x7e, 0x72, 0x90, 0x2e, 0x55, 0x4c, 0xf6, 0xe6, 0x88,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
/* bank # 4 */
0xd8, 0xdc, 0xb4, 0xb8, 0xb0, 0xd8, 0xb9, 0xab, 0xf3, 0xf8, 0xfa, 0xb3, 0xb7, 0xbb, 0x8e, 0x9e,
0xae, 0xf1, 0x32, 0xf5, 0x1b, 0xf1, 0xb4, 0xb8, 0xb0, 0x80, 0x97, 0xf1, 0xa9, 0xdf, 0xdf, 0xdf,
0xaa, 0xdf, 0xdf, 0xdf, 0xf2, 0xaa, 0xc5, 0xcd, 0xc7, 0xa9, 0x0c, 0xc9, 0x2c, 0x97, 0xf1, 0xa9,
0x89, 0x26, 0x46, 0x66, 0xb2, 0x89, 0x99, 0xa9, 0x2d, 0x55, 0x7d, 0xb0, 0xb0, 0x8a, 0xa8, 0x96,
0x36, 0x56, 0x76, 0xf1, 0xba, 0xa3, 0xb4, 0xb2, 0x80, 0xc0, 0xb8, 0xa8, 0x97, 0x11, 0xb2, 0x83,
0x98, 0xba, 0xa3, 0xf0, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xb2, 0xb9, 0xb4, 0x98, 0x83, 0xf1,
0xa3, 0x29, 0x55, 0x7d, 0xba, 0xb5, 0xb1, 0xa3, 0x83, 0x93, 0xf0, 0x00, 0x28, 0x50, 0xf5, 0xb2,
0xb6, 0xaa, 0x83, 0x93, 0x28, 0x54, 0x7c, 0xf1, 0xb9, 0xa3, 0x82, 0x93, 0x61, 0xba, 0xa2, 0xda,
0xde, 0xdf, 0xdb, 0x81, 0x9a, 0xb9, 0xae, 0xf5, 0x60, 0x68, 0x70, 0xf1, 0xda, 0xba, 0xa2, 0xdf,
0xd9, 0xba, 0xa2, 0xfa, 0xb9, 0xa3, 0x82, 0x92, 0xdb, 0x31, 0xba, 0xa2, 0xd9, 0xba, 0xa2, 0xf8,
0xdf, 0x85, 0xa4, 0xd0, 0xc1, 0xbb, 0xad, 0x83, 0xc2, 0xc5, 0xc7, 0xb8, 0xa2, 0xdf, 0xdf, 0xdf,
0xba, 0xa0, 0xdf, 0xdf, 0xdf, 0xd8, 0xd8, 0xf1, 0xb8, 0xaa, 0xb3, 0x8d, 0xb4, 0x98, 0x0d, 0x35,
0x5d, 0xb2, 0xb6, 0xba, 0xaf, 0x8c, 0x96, 0x19, 0x8f, 0x9f, 0xa7, 0x0e, 0x16, 0x1e, 0xb4, 0x9a,
0xb8, 0xaa, 0x87, 0x2c, 0x54, 0x7c, 0xba, 0xa4, 0xb0, 0x8a, 0xb6, 0x91, 0x32, 0x56, 0x76, 0xb2,
0x84, 0x94, 0xa4, 0xc8, 0x08, 0xcd, 0xd8, 0xb8, 0xb4, 0xb0, 0xf1, 0x99, 0x82, 0xa8, 0x2d, 0x55,
0x7d, 0x98, 0xa8, 0x0e, 0x16, 0x1e, 0xa2, 0x2c, 0x54, 0x7c, 0x92, 0xa4, 0xf0, 0x2c, 0x50, 0x78,
/* bank # 5 */
0xf1, 0x84, 0xa8, 0x98, 0xc4, 0xcd, 0xfc, 0xd8, 0x0d, 0xdb, 0xa8, 0xfc, 0x2d, 0xf3, 0xd9, 0xba,
0xa6, 0xf8, 0xda, 0xba, 0xa6, 0xde, 0xd8, 0xba, 0xb2, 0xb6, 0x86, 0x96, 0xa6, 0xd0, 0xf3, 0xc8,
0x41, 0xda, 0xa6, 0xc8, 0xf8, 0xd8, 0xb0, 0xb4, 0xb8, 0x82, 0xa8, 0x92, 0xf5, 0x2c, 0x54, 0x88,
0x98, 0xf1, 0x35, 0xd9, 0xf4, 0x18, 0xd8, 0xf1, 0xa2, 0xd0, 0xf8, 0xf9, 0xa8, 0x84, 0xd9, 0xc7,
0xdf, 0xf8, 0xf8, 0x83, 0xc5, 0xda, 0xdf, 0x69, 0xdf, 0x83, 0xc1, 0xd8, 0xf4, 0x01, 0x14, 0xf1,
0xa8, 0x82, 0x4e, 0xa8, 0x84, 0xf3, 0x11, 0xd1, 0x82, 0xf5, 0xd9, 0x92, 0x28, 0x97, 0x88, 0xf1,
0x09, 0xf4, 0x1c, 0x1c, 0xd8, 0x84, 0xa8, 0xf3, 0xc0, 0xf9, 0xd1, 0xd9, 0x97, 0x82, 0xf1, 0x29,
0xf4, 0x0d, 0xd8, 0xf3, 0xf9, 0xf9, 0xd1, 0xd9, 0x82, 0xf4, 0xc2, 0x03, 0xd8, 0xde, 0xdf, 0x1a,
0xd8, 0xf1, 0xa2, 0xfa, 0xf9, 0xa8, 0x84, 0x98, 0xd9, 0xc7, 0xdf, 0xf8, 0xf8, 0xf8, 0x83, 0xc7,
0xda, 0xdf, 0x69, 0xdf, 0xf8, 0x83, 0xc3, 0xd8, 0xf4, 0x01, 0x14, 0xf1, 0x98, 0xa8, 0x82, 0x2e,
0xa8, 0x84, 0xf3, 0x11, 0xd1, 0x82, 0xf5, 0xd9, 0x92, 0x50, 0x97, 0x88, 0xf1, 0x09, 0xf4, 0x1c,
0xd8, 0x84, 0xa8, 0xf3, 0xc0, 0xf8, 0xf9, 0xd1, 0xd9, 0x97, 0x82, 0xf1, 0x49, 0xf4, 0x0d, 0xd8,
0xf3, 0xf9, 0xf9, 0xd1, 0xd9, 0x82, 0xf4, 0xc4, 0x03, 0xd8, 0xde, 0xdf, 0xd8, 0xf1, 0xad, 0x88,
0x98, 0xcc, 0xa8, 0x09, 0xf9, 0xd9, 0x82, 0x92, 0xa8, 0xf5, 0x7c, 0xf1, 0x88, 0x3a, 0xcf, 0x94,
0x4a, 0x6e, 0x98, 0xdb, 0x69, 0x31, 0xda, 0xad, 0xf2, 0xde, 0xf9, 0xd8, 0x87, 0x95, 0xa8, 0xf2,
0x21, 0xd1, 0xda, 0xa5, 0xf9, 0xf4, 0x17, 0xd9, 0xf1, 0xae, 0x8e, 0xd0, 0xc0, 0xc3, 0xae, 0x82,
/* bank # 6 */
0xc6, 0x84, 0xc3, 0xa8, 0x85, 0x95, 0xc8, 0xa5, 0x88, 0xf2, 0xc0, 0xf1, 0xf4, 0x01, 0x0e, 0xf1,
0x8e, 0x9e, 0xa8, 0xc6, 0x3e, 0x56, 0xf5, 0x54, 0xf1, 0x88, 0x72, 0xf4, 0x01, 0x15, 0xf1, 0x98,
0x45, 0x85, 0x6e, 0xf5, 0x8e, 0x9e, 0x04, 0x88, 0xf1, 0x42, 0x98, 0x5a, 0x8e, 0x9e, 0x06, 0x88,
0x69, 0xf4, 0x01, 0x1c, 0xf1, 0x98, 0x1e, 0x11, 0x08, 0xd0, 0xf5, 0x04, 0xf1, 0x1e, 0x97, 0x02,
0x02, 0x98, 0x36, 0x25, 0xdb, 0xf9, 0xd9, 0x85, 0xa5, 0xf3, 0xc1, 0xda, 0x85, 0xa5, 0xf3, 0xdf,
0xd8, 0x85, 0x95, 0xa8, 0xf3, 0x09, 0xda, 0xa5, 0xfa, 0xd8, 0x82, 0x92, 0xa8, 0xf5, 0x78, 0xf1,
0x88, 0x1a, 0x84, 0x9f, 0x26, 0x88, 0x98, 0x21, 0xda, 0xf4, 0x1d, 0xf3, 0xd8, 0x87, 0x9f, 0x39,
0xd1, 0xaf, 0xd9, 0xdf, 0xdf, 0xfb, 0xf9, 0xf4, 0x0c, 0xf3, 0xd8, 0xfa, 0xd0, 0xf8, 0xda, 0xf9,
0xf9, 0xd0, 0xdf, 0xd9, 0xf9, 0xd8, 0xf4, 0x0b, 0xd8, 0xf3, 0x87, 0x9f, 0x39, 0xd1, 0xaf, 0xd9,
0xdf, 0xdf, 0xf4, 0x1d, 0xf3, 0xd8, 0xfa, 0xfc, 0xa8, 0x69, 0xf9, 0xf9, 0xaf, 0xd0, 0xda, 0xde,
0xfa, 0xd9, 0xf8, 0x8f, 0x9f, 0xa8, 0xf1, 0xcc, 0xf3, 0x98, 0xdb, 0x45, 0xd9, 0xaf, 0xdf, 0xd0,
0xf8, 0xd8, 0xf1, 0x8f, 0x9f, 0xa8, 0xca, 0xf3, 0x88, 0x09, 0xda, 0xaf, 0x8f, 0xcb, 0xf8, 0xd8,
0xf2, 0xad, 0x97, 0x8d, 0x0c, 0xd9, 0xa5, 0xdf, 0xf9, 0xba, 0xa6, 0xf3, 0xfa, 0xf4, 0x12, 0xf2,
0xd8, 0x95, 0x0d, 0xd1, 0xd9, 0xba, 0xa6, 0xf3, 0xfa, 0xda, 0xa5, 0xf2, 0xc1, 0xba, 0xa6, 0xf3,
0xdf, 0xd8, 0xf1, 0xba, 0xb2, 0xb6, 0x86, 0x96, 0xa6, 0xd0, 0xca, 0xf3, 0x49, 0xda, 0xa6, 0xcb,
0xf8, 0xd8, 0xb0, 0xb4, 0xb8, 0xd8, 0xad, 0x84, 0xf2, 0xc0, 0xdf, 0xf1, 0x8f, 0xcb, 0xc3, 0xa8,
/* bank # 7 */
0xb2, 0xb6, 0x86, 0x96, 0xc8, 0xc1, 0xcb, 0xc3, 0xf3, 0xb0, 0xb4, 0x88, 0x98, 0xa8, 0x21, 0xdb,
0x71, 0x8d, 0x9d, 0x71, 0x85, 0x95, 0x21, 0xd9, 0xad, 0xf2, 0xfa, 0xd8, 0x85, 0x97, 0xa8, 0x28,
0xd9, 0xf4, 0x08, 0xd8, 0xf2, 0x8d, 0x29, 0xda, 0xf4, 0x05, 0xd9, 0xf2, 0x85, 0xa4, 0xc2, 0xf2,
0xd8, 0xa8, 0x8d, 0x94, 0x01, 0xd1, 0xd9, 0xf4, 0x11, 0xf2, 0xd8, 0x87, 0x21, 0xd8, 0xf4, 0x0a,
0xd8, 0xf2, 0x84, 0x98, 0xa8, 0xc8, 0x01, 0xd1, 0xd9, 0xf4, 0x11, 0xd8, 0xf3, 0xa4, 0xc8, 0xbb,
0xaf, 0xd0, 0xf2, 0xde, 0xf8, 0xf8, 0xf8, 0xf8, 0xf8, 0xf8, 0xf8, 0xf8, 0xd8, 0xf1, 0xb8, 0xf6,
0xb5, 0xb9, 0xb0, 0x8a, 0x95, 0xa3, 0xde, 0x3c, 0xa3, 0xd9, 0xf8, 0xd8, 0x5c, 0xa3, 0xd9, 0xf8,
0xd8, 0x7c, 0xa3, 0xd9, 0xf8, 0xd8, 0xf8, 0xf9, 0xd1, 0xa5, 0xd9, 0xdf, 0xda, 0xfa, 0xd8, 0xb1,
0x85, 0x30, 0xf7, 0xd9, 0xde, 0xd8, 0xf8, 0x30, 0xad, 0xda, 0xde, 0xd8, 0xf2, 0xb4, 0x8c, 0x99,
0xa3, 0x2d, 0x55, 0x7d, 0xa0, 0x83, 0xdf, 0xdf, 0xdf, 0xb5, 0x91, 0xa0, 0xf6, 0x29, 0xd9, 0xfb,
0xd8, 0xa0, 0xfc, 0x29, 0xd9, 0xfa, 0xd8, 0xa0, 0xd0, 0x51, 0xd9, 0xf8, 0xd8, 0xfc, 0x51, 0xd9,
0xf9, 0xd8, 0x79, 0xd9, 0xfb, 0xd8, 0xa0, 0xd0, 0xfc, 0x79, 0xd9, 0xfa, 0xd8, 0xa1, 0xf9, 0xf9,
0xf9, 0xf9, 0xf9, 0xa0, 0xda, 0xdf, 0xdf, 0xdf, 0xd8, 0xa1, 0xf8, 0xf8, 0xf8, 0xf8, 0xf8, 0xac,
0xde, 0xf8, 0xad, 0xde, 0x83, 0x93, 0xac, 0x2c, 0x54, 0x7c, 0xf1, 0xa8, 0xdf, 0xdf, 0xdf, 0xf6,
0x9d, 0x2c, 0xda, 0xa0, 0xdf, 0xd9, 0xfa, 0xdb, 0x2d, 0xf8, 0xd8, 0xa8, 0x50, 0xda, 0xa0, 0xd0,
0xde, 0xd9, 0xd0, 0xf8, 0xf8, 0xf8, 0xdb, 0x55, 0xf8, 0xd8, 0xa8, 0x78, 0xda, 0xa0, 0xd0, 0xdf,
/* bank # 8 */
0xd9, 0xd0, 0xfa, 0xf8, 0xf8, 0xf8, 0xf8, 0xdb, 0x7d, 0xf8, 0xd8, 0x9c, 0xa8, 0x8c, 0xf5, 0x30,
0xdb, 0x38, 0xd9, 0xd0, 0xde, 0xdf, 0xa0, 0xd0, 0xde, 0xdf, 0xd8, 0xa8, 0x48, 0xdb, 0x58, 0xd9,
0xdf, 0xd0, 0xde, 0xa0, 0xdf, 0xd0, 0xde, 0xd8, 0xa8, 0x68, 0xdb, 0x70, 0xd9, 0xdf, 0xdf, 0xa0,
0xdf, 0xdf, 0xd8, 0xf1, 0xa8, 0x88, 0x90, 0x2c, 0x54, 0x7c, 0x98, 0xa8, 0xd0, 0x5c, 0x38, 0xd1,
0xda, 0xf2, 0xae, 0x8c, 0xdf, 0xf9, 0xd8, 0xb0, 0x87, 0xa8, 0xc1, 0xc1, 0xb1, 0x88, 0xa8, 0xc6,
0xf9, 0xf9, 0xda, 0x36, 0xd8, 0xa8, 0xf9, 0xda, 0x36, 0xd8, 0xa8, 0xf9, 0xda, 0x36, 0xd8, 0xa8,
0xf9, 0xda, 0x36, 0xd8, 0xa8, 0xf9, 0xda, 0x36, 0xd8, 0xf7, 0x8d, 0x9d, 0xad, 0xf8, 0x18, 0xda,
0xf2, 0xae, 0xdf, 0xd8, 0xf7, 0xad, 0xfa, 0x30, 0xd9, 0xa4, 0xde, 0xf9, 0xd8, 0xf2, 0xae, 0xde,
0xfa, 0xf9, 0x83, 0xa7, 0xd9, 0xc3, 0xc5, 0xc7, 0xf1, 0x88, 0x9b, 0xa7, 0x7a, 0xad, 0xf7, 0xde,
0xdf, 0xa4, 0xf8, 0x84, 0x94, 0x08, 0xa7, 0x97, 0xf3, 0x00, 0xae, 0xf2, 0x98, 0x19, 0xa4, 0x88,
0xc6, 0xa3, 0x94, 0x88, 0xf6, 0x32, 0xdf, 0xf2, 0x83, 0x93, 0xdb, 0x09, 0xd9, 0xf2, 0xaa, 0xdf,
0xd8, 0xd8, 0xae, 0xf8, 0xf9, 0xd1, 0xda, 0xf3, 0xa4, 0xde, 0xa7, 0xf1, 0x88, 0x9b, 0x7a, 0xd8,
0xf3, 0x84, 0x94, 0xae, 0x19, 0xf9, 0xda, 0xaa, 0xf1, 0xdf, 0xd8, 0xa8, 0x81, 0xc0, 0xc3, 0xc5,
0xc7, 0xa3, 0x92, 0x83, 0xf6, 0x28, 0xad, 0xde, 0xd9, 0xf8, 0xd8, 0xa3, 0x50, 0xad, 0xd9, 0xf8,
0xd8, 0xa3, 0x78, 0xad, 0xd9, 0xf8, 0xd8, 0xf8, 0xf9, 0xd1, 0xa1, 0xda, 0xde, 0xc3, 0xc5, 0xc7,
0xd8, 0xa1, 0x81, 0x94, 0xf8, 0x18, 0xf2, 0xb0, 0x89, 0xac, 0xc3, 0xc5, 0xc7, 0xf1, 0xd8, 0xb8,
/* bank # 9 */
0xb4, 0xb0, 0x97, 0x86, 0xa8, 0x31, 0x9b, 0x06, 0x99, 0x07, 0xab, 0x97, 0x28, 0x88, 0x9b, 0xf0,
0x0c, 0x20, 0x14, 0x40, 0xb0, 0xb4, 0xb8, 0xf0, 0xa8, 0x8a, 0x9a, 0x28, 0x50, 0x78, 0xb7, 0x9b,
0xa8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31, 0xf1, 0xbb, 0xab,
0x88, 0x00, 0x2c, 0x54, 0x7c, 0xf0, 0xb3, 0x8b, 0xb8, 0xa8, 0x04, 0x28, 0x50, 0x78, 0xf1, 0xb0,
0x88, 0xb4, 0x97, 0x26, 0xa8, 0x59, 0x98, 0xbb, 0xab, 0xb3, 0x8b, 0x02, 0x26, 0x46, 0x66, 0xb0,
0xb8, 0xf0, 0x8a, 0x9c, 0xa8, 0x29, 0x51, 0x79, 0x8b, 0x29, 0x51, 0x79, 0x8a, 0x24, 0x70, 0x59,
0x8b, 0x20, 0x58, 0x71, 0x8a, 0x44, 0x69, 0x38, 0x8b, 0x39, 0x40, 0x68, 0x8a, 0x64, 0x48, 0x31,
0x8b, 0x30, 0x49, 0x60, 0x88, 0xf1, 0xac, 0x00, 0x2c, 0x54, 0x7c, 0xf0, 0x8c, 0xa8, 0x04, 0x28,
0x50, 0x78, 0xf1, 0x88, 0x97, 0x26, 0xa8, 0x59, 0x98, 0xac, 0x8c, 0x02, 0x26, 0x46, 0x66, 0xf0,
0x89, 0x9c, 0xa8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31, 0xa9,
0x88, 0x09, 0x20, 0x59, 0x70, 0xab, 0x11, 0x38, 0x40, 0x69, 0xa8, 0x19, 0x31, 0x48, 0x60, 0x8c,
0xa8, 0x3c, 0x41, 0x5c, 0x20, 0x7c, 0x00, 0xf1, 0x87, 0x98, 0x19, 0x86, 0xa8, 0x6e, 0x76, 0x7e,
0xa9, 0x99, 0x88, 0x2d, 0x55, 0x7d, 0xd8, 0xb1, 0xb5, 0xb9, 0xa3, 0xdf, 0xdf, 0xdf, 0xae, 0xd0,
0xdf, 0xaa, 0xd0, 0xde, 0xf2, 0xab, 0xf8, 0xf9, 0xd9, 0xb0, 0x87, 0xc4, 0xaa, 0xf1, 0xdf, 0xdf,
0xbb, 0xaf, 0xdf, 0xdf, 0xb9, 0xd8, 0xb1, 0xf1, 0xa3, 0x97, 0x8e, 0x60, 0xdf, 0xb0, 0x84, 0xf2,
0xc8, 0xf8, 0xf9, 0xd9, 0xde, 0xd8, 0x93, 0x85, 0xf1, 0x4a, 0xb1, 0x83, 0xa3, 0x08, 0xb5, 0x83,
/* bank # 10 */
0x9a, 0x08, 0x10, 0xb7, 0x9f, 0x10, 0xd8, 0xf1, 0xb0, 0xba, 0xae, 0xb0, 0x8a, 0xc2, 0xb2, 0xb6,
0x8e, 0x9e, 0xf1, 0xfb, 0xd9, 0xf4, 0x1d, 0xd8, 0xf9, 0xd9, 0x0c, 0xf1, 0xd8, 0xf8, 0xf8, 0xad,
0x61, 0xd9, 0xae, 0xfb, 0xd8, 0xf4, 0x0c, 0xf1, 0xd8, 0xf8, 0xf8, 0xad, 0x19, 0xd9, 0xae, 0xfb,
0xdf, 0xd8, 0xf4, 0x16, 0xf1, 0xd8, 0xf8, 0xad, 0x8d, 0x61, 0xd9, 0xf4, 0xf4, 0xac, 0xf5, 0x9c,
0x9c, 0x8d, 0xdf, 0x2b, 0xba, 0xb6, 0xae, 0xfa, 0xf8, 0xf4, 0x0b, 0xd8, 0xf1, 0xae, 0xd0, 0xf8,
0xad, 0x51, 0xda, 0xae, 0xfa, 0xf8, 0xf1, 0xd8, 0xb9, 0xb1, 0xb6, 0xa3, 0x83, 0x9c, 0x08, 0xb9,
0xb1, 0x83, 0x9a, 0xb5, 0xaa, 0xc0, 0xfd, 0x30, 0x83, 0xb7, 0x9f, 0x10, 0xb5, 0x8b, 0x93, 0xf2,
0x02, 0x02, 0xd1, 0xab, 0xda, 0xde, 0xd8, 0xf1, 0xb0, 0x80, 0xba, 0xab, 0xc0, 0xc3, 0xb2, 0x84,
0xc1, 0xc3, 0xd8, 0xb1, 0xb9, 0xf3, 0x8b, 0xa3, 0x91, 0xb6, 0x09, 0xb4, 0xd9, 0xab, 0xde, 0xb0,
0x87, 0x9c, 0xb9, 0xa3, 0xdd, 0xf1, 0xb3, 0x8b, 0x8b, 0x8b, 0x8b, 0x8b, 0xb0, 0x87, 0xa3, 0xa3,
0xa3, 0xa3, 0xb2, 0x8b, 0xb6, 0x9b, 0xf2, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3,
0xa3, 0xf1, 0xb0, 0x87, 0xb5, 0x9a, 0xa3, 0xf3, 0x9b, 0xa3, 0xa3, 0xdc, 0xba, 0xac, 0xdf, 0xb9,
0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3, 0xa3,
0xd8, 0xd8, 0xd8, 0xbb, 0xb3, 0xb7, 0xf1, 0xaa, 0xf9, 0xda, 0xff, 0xd9, 0x80, 0x9a, 0xaa, 0x28,
0xb4, 0x80, 0x98, 0xa7, 0x20, 0xb7, 0x97, 0x87, 0xa8, 0x66, 0x88, 0xf0, 0x79, 0x51, 0xf1, 0x90,
0x2c, 0x87, 0x0c, 0xa7, 0x81, 0x97, 0x62, 0x93, 0xf0, 0x71, 0x71, 0x60, 0x85, 0x94, 0x01, 0x29,
/* bank # 11 */
0x51, 0x79, 0x90, 0xa5, 0xf1, 0x28, 0x4c, 0x6c, 0x87, 0x0c, 0x95, 0x18, 0x85, 0x78, 0xa3, 0x83,
0x90, 0x28, 0x4c, 0x6c, 0x88, 0x6c, 0xd8, 0xf3, 0xa2, 0x82, 0x00, 0xf2, 0x10, 0xa8, 0x92, 0x19,
0x80, 0xa2, 0xf2, 0xd9, 0x26, 0xd8, 0xf1, 0x88, 0xa8, 0x4d, 0xd9, 0x48, 0xd8, 0x96, 0xa8, 0x39,
0x80, 0xd9, 0x3c, 0xd8, 0x95, 0x80, 0xa8, 0x39, 0xa6, 0x86, 0x98, 0xd9, 0x2c, 0xda, 0x87, 0xa7,
0x2c, 0xd8, 0xa8, 0x89, 0x95, 0x19, 0xa9, 0x80, 0xd9, 0x38, 0xd8, 0xa8, 0x89, 0x39, 0xa9, 0x80,
0xda, 0x3c, 0xd8, 0xa8, 0x2e, 0xa8, 0x39, 0x90, 0xd9, 0x0c, 0xd8, 0xa8, 0x95, 0x31, 0x98, 0xd9,
0x0c, 0xd8, 0xa8, 0x09, 0xd9, 0xff, 0xd8, 0x01, 0xda, 0xff, 0xd8, 0x95, 0x39, 0xa9, 0xda, 0x26,
0xff, 0xd8, 0x90, 0xa8, 0x0d, 0x89, 0x99, 0xa8, 0x10, 0x80, 0x98, 0x21, 0xda, 0x2e, 0xd8, 0x89,
0x99, 0xa8, 0x31, 0x80, 0xda, 0x2e, 0xd8, 0xa8, 0x86, 0x96, 0x31, 0x80, 0xda, 0x2e, 0xd8, 0xa8,
0x87, 0x31, 0x80, 0xda, 0x2e, 0xd8, 0xa8, 0x82, 0x92, 0xf3, 0x41, 0x80, 0xf1, 0xd9, 0x2e, 0xd8,
0xa8, 0x82, 0xf3, 0x19, 0x80, 0xf1, 0xd9, 0x2e, 0xd8, 0x82, 0xac, 0xf3, 0xc0, 0xa2, 0x80, 0x22,
0xf1, 0xa6, 0x2e, 0xa7, 0x2e, 0xa9, 0x22, 0x98, 0xa8, 0x29, 0xda, 0xac, 0xde, 0xff, 0xd8, 0xa2,
0xf2, 0x2a, 0xf1, 0xa9, 0x2e, 0x82, 0x92, 0xa8, 0xf2, 0x31, 0x80, 0xa6, 0x96, 0xf1, 0xd9, 0x00,
0xac, 0x8c, 0x9c, 0x0c, 0x30, 0xac, 0xde, 0xd0, 0xde, 0xff, 0xd8, 0x8c, 0x9c, 0xac, 0xd0, 0x10,
0xac, 0xde, 0x80, 0x92, 0xa2, 0xf2, 0x4c, 0x82, 0xa8, 0xf1, 0xca, 0xf2, 0x35, 0xf1, 0x96, 0x88,
0xa6, 0xd9, 0x00, 0xd8, 0xf1, 0xff
};
static const unsigned short sStartAddress = 0x0400;
/* END OF SECTION COPIED FROM dmpDefaultMPU6050.c */
#define INT_SRC_TAP (0x01)
#define INT_SRC_ANDROID_ORIENT (0x08)
#define DMP_FEATURE_SEND_ANY_GYRO (DMP_FEATURE_SEND_RAW_GYRO | \
DMP_FEATURE_SEND_CAL_GYRO)
#define MAX_PACKET_LENGTH (32)
#define DMP_SAMPLE_RATE (200)
#define GYRO_SF (46850825LL * 200 / DMP_SAMPLE_RATE)
#define FIFO_CORRUPTION_CHECK
#ifdef FIFO_CORRUPTION_CHECK
#define QUAT_ERROR_THRESH (1L<<24)
#define QUAT_MAG_SQ_NORMALIZED (1L<<28)
#define QUAT_MAG_SQ_MIN (QUAT_MAG_SQ_NORMALIZED - QUAT_ERROR_THRESH)
#define QUAT_MAG_SQ_MAX (QUAT_MAG_SQ_NORMALIZED + QUAT_ERROR_THRESH)
#endif
struct dmp_s {
void (*tap_cb)(unsigned char count, unsigned char direction);
void (*android_orient_cb)(unsigned char orientation);
unsigned short orient;
unsigned short feature_mask;
unsigned short fifo_rate;
unsigned char packet_length;
};
static struct dmp_s dmp = {
.tap_cb = NULL,
.android_orient_cb = NULL,
.orient = 0,
.feature_mask = 0,
.fifo_rate = 0,
.packet_length = 0
};
/**
* @brief Load the DMP with this image.
* @return 0 if successful.
*/
int dmp_load_motion_driver_firmware(void)
{
return mpu_load_firmware(DMP_CODE_SIZE, dmp_memory, sStartAddress,
DMP_SAMPLE_RATE);
}
/**
* @brief Push gyro and accel orientation to the DMP.
* The orientation is represented here as the output of
* @e inv_orientation_matrix_to_scalar.
* @param[in] orient Gyro and accel orientation in body frame.
* @return 0 if successful.
*/
int dmp_set_orientation(unsigned short orient)
{
unsigned char gyro_regs[3], accel_regs[3];
const unsigned char gyro_axes[3] = {DINA4C, DINACD, DINA6C};
const unsigned char accel_axes[3] = {DINA0C, DINAC9, DINA2C};
const unsigned char gyro_sign[3] = {DINA36, DINA56, DINA76};
const unsigned char accel_sign[3] = {DINA26, DINA46, DINA66};
gyro_regs[0] = gyro_axes[orient & 3];
gyro_regs[1] = gyro_axes[(orient >> 3) & 3];
gyro_regs[2] = gyro_axes[(orient >> 6) & 3];
accel_regs[0] = accel_axes[orient & 3];
accel_regs[1] = accel_axes[(orient >> 3) & 3];
accel_regs[2] = accel_axes[(orient >> 6) & 3];
/* Chip-to-body, axes only. */
if (mpu_write_mem(FCFG_1, 3, gyro_regs))
return -1;
if (mpu_write_mem(FCFG_2, 3, accel_regs))
return -1;
memcpy(gyro_regs, gyro_sign, 3);
memcpy(accel_regs, accel_sign, 3);
if (orient & 4) {
gyro_regs[0] |= 1;
accel_regs[0] |= 1;
}
if (orient & 0x20) {
gyro_regs[1] |= 1;
accel_regs[1] |= 1;
}
if (orient & 0x100) {
gyro_regs[2] |= 1;
accel_regs[2] |= 1;
}
/* Chip-to-body, sign only. */
if (mpu_write_mem(FCFG_3, 3, gyro_regs))
return -1;
if (mpu_write_mem(FCFG_7, 3, accel_regs))
return -1;
dmp.orient = orient;
return 0;
}
/**
* @brief Push gyro biases to the DMP.
* Because the gyro integration is handled in the DMP, any gyro biases
* calculated by the MPL should be pushed down to DMP memory to remove
* 3-axis quaternion drift.
* \n NOTE: If the DMP-based gyro calibration is enabled, the DMP will
* overwrite the biases written to this location once a new one is computed.
* @param[in] bias Gyro biases in q16.
* @return 0 if successful.
*/
int dmp_set_gyro_bias(long *bias)
{
long gyro_bias_body[3];
unsigned char regs[4];
gyro_bias_body[0] = bias[dmp.orient & 3];
if (dmp.orient & 4)
gyro_bias_body[0] *= -1;
gyro_bias_body[1] = bias[(dmp.orient >> 3) & 3];
if (dmp.orient & 0x20)
gyro_bias_body[1] *= -1;
gyro_bias_body[2] = bias[(dmp.orient >> 6) & 3];
if (dmp.orient & 0x100)
gyro_bias_body[2] *= -1;
#ifdef EMPL_NO_64BIT
gyro_bias_body[0] = (long)(((float)gyro_bias_body[0] * GYRO_SF) / 1073741824.f);
gyro_bias_body[1] = (long)(((float)gyro_bias_body[1] * GYRO_SF) / 1073741824.f);
gyro_bias_body[2] = (long)(((float)gyro_bias_body[2] * GYRO_SF) / 1073741824.f);
#else
gyro_bias_body[0] = (long)(((long long)gyro_bias_body[0] * GYRO_SF) >> 30);
gyro_bias_body[1] = (long)(((long long)gyro_bias_body[1] * GYRO_SF) >> 30);
gyro_bias_body[2] = (long)(((long long)gyro_bias_body[2] * GYRO_SF) >> 30);
#endif
regs[0] = (unsigned char)((gyro_bias_body[0] >> 24) & 0xFF);
regs[1] = (unsigned char)((gyro_bias_body[0] >> 16) & 0xFF);
regs[2] = (unsigned char)((gyro_bias_body[0] >> 8) & 0xFF);
regs[3] = (unsigned char)(gyro_bias_body[0] & 0xFF);
if (mpu_write_mem(D_EXT_GYRO_BIAS_X, 4, regs))
return -1;
regs[0] = (unsigned char)((gyro_bias_body[1] >> 24) & 0xFF);
regs[1] = (unsigned char)((gyro_bias_body[1] >> 16) & 0xFF);
regs[2] = (unsigned char)((gyro_bias_body[1] >> 8) & 0xFF);
regs[3] = (unsigned char)(gyro_bias_body[1] & 0xFF);
if (mpu_write_mem(D_EXT_GYRO_BIAS_Y, 4, regs))
return -1;
regs[0] = (unsigned char)((gyro_bias_body[2] >> 24) & 0xFF);
regs[1] = (unsigned char)((gyro_bias_body[2] >> 16) & 0xFF);
regs[2] = (unsigned char)((gyro_bias_body[2] >> 8) & 0xFF);
regs[3] = (unsigned char)(gyro_bias_body[2] & 0xFF);
return mpu_write_mem(D_EXT_GYRO_BIAS_Z, 4, regs);
}
/**
* @brief Push accel biases to the DMP.
* These biases will be removed from the DMP 6-axis quaternion.
* @param[in] bias Accel biases in q16.
* @return 0 if successful.
*/
int dmp_set_accel_bias(long *bias)
{
long accel_bias_body[3];
unsigned char regs[12];
long long accel_sf;
unsigned short accel_sens;
mpu_get_accel_sens(&accel_sens);
accel_sf = (long long)accel_sens << 15;
// __no_operation();
accel_bias_body[0] = bias[dmp.orient & 3];
if (dmp.orient & 4)
accel_bias_body[0] *= -1;
accel_bias_body[1] = bias[(dmp.orient >> 3) & 3];
if (dmp.orient & 0x20)
accel_bias_body[1] *= -1;
accel_bias_body[2] = bias[(dmp.orient >> 6) & 3];
if (dmp.orient & 0x100)
accel_bias_body[2] *= -1;
#ifdef EMPL_NO_64BIT
accel_bias_body[0] = (long)(((float)accel_bias_body[0] * accel_sf) / 1073741824.f);
accel_bias_body[1] = (long)(((float)accel_bias_body[1] * accel_sf) / 1073741824.f);
accel_bias_body[2] = (long)(((float)accel_bias_body[2] * accel_sf) / 1073741824.f);
#else
accel_bias_body[0] = (long)(((long long)accel_bias_body[0] * accel_sf) >> 30);
accel_bias_body[1] = (long)(((long long)accel_bias_body[1] * accel_sf) >> 30);
accel_bias_body[2] = (long)(((long long)accel_bias_body[2] * accel_sf) >> 30);
#endif
regs[0] = (unsigned char)((accel_bias_body[0] >> 24) & 0xFF);
regs[1] = (unsigned char)((accel_bias_body[0] >> 16) & 0xFF);
regs[2] = (unsigned char)((accel_bias_body[0] >> 8) & 0xFF);
regs[3] = (unsigned char)(accel_bias_body[0] & 0xFF);
regs[4] = (unsigned char)((accel_bias_body[1] >> 24) & 0xFF);
regs[5] = (unsigned char)((accel_bias_body[1] >> 16) & 0xFF);
regs[6] = (unsigned char)((accel_bias_body[1] >> 8) & 0xFF);
regs[7] = (unsigned char)(accel_bias_body[1] & 0xFF);
regs[8] = (unsigned char)((accel_bias_body[2] >> 24) & 0xFF);
regs[9] = (unsigned char)((accel_bias_body[2] >> 16) & 0xFF);
regs[10] = (unsigned char)((accel_bias_body[2] >> 8) & 0xFF);
regs[11] = (unsigned char)(accel_bias_body[2] & 0xFF);
return mpu_write_mem(D_ACCEL_BIAS, 12, regs);
}
/**
* @brief Set DMP output rate.
* Only used when DMP is on.
* @param[in] rate Desired fifo rate (Hz).
* @return 0 if successful.
*/
int dmp_set_fifo_rate(unsigned short rate)
{
const unsigned char regs_end[12] = {DINAFE, DINAF2, DINAAB,
0xc4, DINAAA, DINAF1, DINADF, DINADF, 0xBB, 0xAF, DINADF, DINADF};
unsigned short div;
unsigned char tmp[8];
if (rate > DMP_SAMPLE_RATE)
return -1;
div = DMP_SAMPLE_RATE / rate - 1;
tmp[0] = (unsigned char)((div >> 8) & 0xFF);
tmp[1] = (unsigned char)(div & 0xFF);
if (mpu_write_mem(D_0_22, 2, tmp))
return -1;
if (mpu_write_mem(CFG_6, 12, (unsigned char*)regs_end))
return -1;
dmp.fifo_rate = rate;
return 0;
}
/**
* @brief Get DMP output rate.
* @param[out] rate Current fifo rate (Hz).
* @return 0 if successful.
*/
int dmp_get_fifo_rate(unsigned short *rate)
{
rate[0] = dmp.fifo_rate;
return 0;
}
/**
* @brief Set tap threshold for a specific axis.
* @param[in] axis 1, 2, and 4 for XYZ accel, respectively.
* @param[in] thresh Tap threshold, in mg/ms.
* @return 0 if successful.
*/
int dmp_set_tap_thresh(unsigned char axis, unsigned short thresh)
{
unsigned char tmp[4], accel_fsr;
float scaled_thresh;
unsigned short dmp_thresh, dmp_thresh_2;
if (!(axis & TAP_XYZ) || thresh > 1600)
return -1;
scaled_thresh = (float)thresh / DMP_SAMPLE_RATE;
mpu_get_accel_fsr(&accel_fsr);
switch (accel_fsr) {
case 2:
dmp_thresh = (unsigned short)(scaled_thresh * 16384);
/* dmp_thresh * 0.75 */
dmp_thresh_2 = (unsigned short)(scaled_thresh * 12288);
break;
case 4:
dmp_thresh = (unsigned short)(scaled_thresh * 8192);
/* dmp_thresh * 0.75 */
dmp_thresh_2 = (unsigned short)(scaled_thresh * 6144);
break;
case 8:
dmp_thresh = (unsigned short)(scaled_thresh * 4096);
/* dmp_thresh * 0.75 */
dmp_thresh_2 = (unsigned short)(scaled_thresh * 3072);
break;
case 16:
dmp_thresh = (unsigned short)(scaled_thresh * 2048);
/* dmp_thresh * 0.75 */
dmp_thresh_2 = (unsigned short)(scaled_thresh * 1536);
break;
default:
return -1;
}
tmp[0] = (unsigned char)(dmp_thresh >> 8);
tmp[1] = (unsigned char)(dmp_thresh & 0xFF);
tmp[2] = (unsigned char)(dmp_thresh_2 >> 8);
tmp[3] = (unsigned char)(dmp_thresh_2 & 0xFF);
if (axis & TAP_X) {
if (mpu_write_mem(DMP_TAP_THX, 2, tmp))
return -1;
if (mpu_write_mem(D_1_36, 2, tmp+2))
return -1;
}
if (axis & TAP_Y) {
if (mpu_write_mem(DMP_TAP_THY, 2, tmp))
return -1;
if (mpu_write_mem(D_1_40, 2, tmp+2))
return -1;
}
if (axis & TAP_Z) {
if (mpu_write_mem(DMP_TAP_THZ, 2, tmp))
return -1;
if (mpu_write_mem(D_1_44, 2, tmp+2))
return -1;
}
return 0;
}
/**
* @brief Set which axes will register a tap.
* @param[in] axis 1, 2, and 4 for XYZ, respectively.
* @return 0 if successful.
*/
int dmp_set_tap_axes(unsigned char axis)
{
unsigned char tmp = 0;
if (axis & TAP_X)
tmp |= 0x30;
if (axis & TAP_Y)
tmp |= 0x0C;
if (axis & TAP_Z)
tmp |= 0x03;
return mpu_write_mem(D_1_72, 1, &tmp);
}
/**
* @brief Set minimum number of taps needed for an interrupt.
* @param[in] min_taps Minimum consecutive taps (1-4).
* @return 0 if successful.
*/
int dmp_set_tap_count(unsigned char min_taps)
{
unsigned char tmp;
if (min_taps < 1)
min_taps = 1;
else if (min_taps > 4)
min_taps = 4;
tmp = min_taps - 1;
return mpu_write_mem(D_1_79, 1, &tmp);
}
/**
* @brief Set length between valid taps.
* @param[in] time Milliseconds between taps.
* @return 0 if successful.
*/
int dmp_set_tap_time(unsigned short time)
{
unsigned short dmp_time;
unsigned char tmp[2];
dmp_time = time / (1000 / DMP_SAMPLE_RATE);
tmp[0] = (unsigned char)(dmp_time >> 8);
tmp[1] = (unsigned char)(dmp_time & 0xFF);
return mpu_write_mem(DMP_TAPW_MIN, 2, tmp);
}
/**
* @brief Set max time between taps to register as a multi-tap.
* @param[in] time Max milliseconds between taps.
* @return 0 if successful.
*/
int dmp_set_tap_time_multi(unsigned short time)
{
unsigned short dmp_time;
unsigned char tmp[2];
dmp_time = time / (1000 / DMP_SAMPLE_RATE);
tmp[0] = (unsigned char)(dmp_time >> 8);
tmp[1] = (unsigned char)(dmp_time & 0xFF);
return mpu_write_mem(D_1_218, 2, tmp);
}
/**
* @brief Set shake rejection threshold.
* If the DMP detects a gyro sample larger than @e thresh, taps are rejected.
* @param[in] sf Gyro scale factor.
* @param[in] thresh Gyro threshold in dps.
* @return 0 if successful.
*/
int dmp_set_shake_reject_thresh(long sf, unsigned short thresh)
{
unsigned char tmp[4];
long thresh_scaled = sf / 1000 * thresh;
tmp[0] = (unsigned char)(((long)thresh_scaled >> 24) & 0xFF);
tmp[1] = (unsigned char)(((long)thresh_scaled >> 16) & 0xFF);
tmp[2] = (unsigned char)(((long)thresh_scaled >> 8) & 0xFF);
tmp[3] = (unsigned char)((long)thresh_scaled & 0xFF);
return mpu_write_mem(D_1_92, 4, tmp);
}
/**
* @brief Set shake rejection time.
* Sets the length of time that the gyro must be outside of the threshold set
* by @e gyro_set_shake_reject_thresh before taps are rejected. A mandatory
* 60 ms is added to this parameter.
* @param[in] time Time in milliseconds.
* @return 0 if successful.
*/
int dmp_set_shake_reject_time(unsigned short time)
{
unsigned char tmp[2];
time /= (1000 / DMP_SAMPLE_RATE);
tmp[0] = time >> 8;
tmp[1] = time & 0xFF;
return mpu_write_mem(D_1_90,2,tmp);
}
/**
* @brief Set shake rejection timeout.
* Sets the length of time after a shake rejection that the gyro must stay
* inside of the threshold before taps can be detected again. A mandatory
* 60 ms is added to this parameter.
* @param[in] time Time in milliseconds.
* @return 0 if successful.
*/
int dmp_set_shake_reject_timeout(unsigned short time)
{
unsigned char tmp[2];
time /= (1000 / DMP_SAMPLE_RATE);
tmp[0] = time >> 8;
tmp[1] = time & 0xFF;
return mpu_write_mem(D_1_88,2,tmp);
}
/**
* @brief Get current step count.
* @param[out] count Number of steps detected.
* @return 0 if successful.
*/
int dmp_get_pedometer_step_count(unsigned long *count)
{
unsigned char tmp[4];
if (!count)
return -1;
if (mpu_read_mem(D_PEDSTD_STEPCTR, 4, tmp))
return -1;
count[0] = ((unsigned long)tmp[0] << 24) | ((unsigned long)tmp[1] << 16) |
((unsigned long)tmp[2] << 8) | tmp[3];
return 0;
}
/**
* @brief Overwrite current step count.
* WARNING: This function writes to DMP memory and could potentially encounter
* a race condition if called while the pedometer is enabled.
* @param[in] count New step count.
* @return 0 if successful.
*/
int dmp_set_pedometer_step_count(unsigned long count)
{
unsigned char tmp[4];
tmp[0] = (unsigned char)((count >> 24) & 0xFF);
tmp[1] = (unsigned char)((count >> 16) & 0xFF);
tmp[2] = (unsigned char)((count >> 8) & 0xFF);
tmp[3] = (unsigned char)(count & 0xFF);
return mpu_write_mem(D_PEDSTD_STEPCTR, 4, tmp);
}
/**
* @brief Get duration of walking time.
* @param[in] time Walk time in milliseconds.
* @return 0 if successful.
*/
int dmp_get_pedometer_walk_time(unsigned long *time)
{
unsigned char tmp[4];
if (!time)
return -1;
if (mpu_read_mem(D_PEDSTD_TIMECTR, 4, tmp))
return -1;
time[0] = (((unsigned long)tmp[0] << 24) | ((unsigned long)tmp[1] << 16) |
((unsigned long)tmp[2] << 8) | tmp[3]) * 20;
return 0;
}
/**
* @brief Overwrite current walk time.
* WARNING: This function writes to DMP memory and could potentially encounter
* a race condition if called while the pedometer is enabled.
* @param[in] time New walk time in milliseconds.
*/
int dmp_set_pedometer_walk_time(unsigned long time)
{
unsigned char tmp[4];
time /= 20;
tmp[0] = (unsigned char)((time >> 24) & 0xFF);
tmp[1] = (unsigned char)((time >> 16) & 0xFF);
tmp[2] = (unsigned char)((time >> 8) & 0xFF);
tmp[3] = (unsigned char)(time & 0xFF);
return mpu_write_mem(D_PEDSTD_TIMECTR, 4, tmp);
}
/**
* @brief Enable DMP features.
* The following \#define's are used in the input mask:
* \n DMP_FEATURE_TAP
* \n DMP_FEATURE_ANDROID_ORIENT
* \n DMP_FEATURE_LP_QUAT
* \n DMP_FEATURE_6X_LP_QUAT
* \n DMP_FEATURE_GYRO_CAL
* \n DMP_FEATURE_SEND_RAW_ACCEL
* \n DMP_FEATURE_SEND_RAW_GYRO
* \n NOTE: DMP_FEATURE_LP_QUAT and DMP_FEATURE_6X_LP_QUAT are mutually
* exclusive.
* \n NOTE: DMP_FEATURE_SEND_RAW_GYRO and DMP_FEATURE_SEND_CAL_GYRO are also
* mutually exclusive.
* @param[in] mask Mask of features to enable.
* @return 0 if successful.
*/
int dmp_enable_feature(unsigned short mask)
{
unsigned char tmp[10];
/* TODO: All of these settings can probably be integrated into the default
* DMP image.
*/
/* Set integration scale factor. */
tmp[0] = (unsigned char)((GYRO_SF >> 24) & 0xFF);
tmp[1] = (unsigned char)((GYRO_SF >> 16) & 0xFF);
tmp[2] = (unsigned char)((GYRO_SF >> 8) & 0xFF);
tmp[3] = (unsigned char)(GYRO_SF & 0xFF);
mpu_write_mem(D_0_104, 4, tmp);
/* Send sensor data to the FIFO. */
tmp[0] = 0xA3;
if (mask & DMP_FEATURE_SEND_RAW_ACCEL) {
tmp[1] = 0xC0;
tmp[2] = 0xC8;
tmp[3] = 0xC2;
} else {
tmp[1] = 0xA3;
tmp[2] = 0xA3;
tmp[3] = 0xA3;
}
if (mask & DMP_FEATURE_SEND_ANY_GYRO) {
tmp[4] = 0xC4;
tmp[5] = 0xCC;
tmp[6] = 0xC6;
} else {
tmp[4] = 0xA3;
tmp[5] = 0xA3;
tmp[6] = 0xA3;
}
tmp[7] = 0xA3;
tmp[8] = 0xA3;
tmp[9] = 0xA3;
mpu_write_mem(CFG_15,10,tmp);
/* Send gesture data to the FIFO. */
if (mask & (DMP_FEATURE_TAP | DMP_FEATURE_ANDROID_ORIENT))
tmp[0] = DINA20;
else
tmp[0] = 0xD8;
mpu_write_mem(CFG_27,1,tmp);
if (mask & DMP_FEATURE_GYRO_CAL)
dmp_enable_gyro_cal(1);
else
dmp_enable_gyro_cal(0);
if (mask & DMP_FEATURE_SEND_ANY_GYRO) {
if (mask & DMP_FEATURE_SEND_CAL_GYRO) {
tmp[0] = 0xB2;
tmp[1] = 0x8B;
tmp[2] = 0xB6;
tmp[3] = 0x9B;
} else {
tmp[0] = DINAC0;
tmp[1] = DINA80;
tmp[2] = DINAC2;
tmp[3] = DINA90;
}
mpu_write_mem(CFG_GYRO_RAW_DATA, 4, tmp);
}
if (mask & DMP_FEATURE_TAP) {
/* Enable tap. */
tmp[0] = 0xF8;
mpu_write_mem(CFG_20, 1, tmp);
dmp_set_tap_thresh(TAP_XYZ, 250);
dmp_set_tap_axes(TAP_XYZ);
dmp_set_tap_count(1);
dmp_set_tap_time(100);
dmp_set_tap_time_multi(500);
dmp_set_shake_reject_thresh(GYRO_SF, 200);
dmp_set_shake_reject_time(40);
dmp_set_shake_reject_timeout(10);
} else {
tmp[0] = 0xD8;
mpu_write_mem(CFG_20, 1, tmp);
}
if (mask & DMP_FEATURE_ANDROID_ORIENT) {
tmp[0] = 0xD9;
} else
tmp[0] = 0xD8;
mpu_write_mem(CFG_ANDROID_ORIENT_INT, 1, tmp);
if (mask & DMP_FEATURE_LP_QUAT)
dmp_enable_lp_quat(1);
else
dmp_enable_lp_quat(0);
if (mask & DMP_FEATURE_6X_LP_QUAT)
dmp_enable_6x_lp_quat(1);
else
dmp_enable_6x_lp_quat(0);
/* Pedometer is always enabled. */
dmp.feature_mask = mask | DMP_FEATURE_PEDOMETER;
mpu_reset_fifo();
dmp.packet_length = 0;
if (mask & DMP_FEATURE_SEND_RAW_ACCEL)
dmp.packet_length += 6;
if (mask & DMP_FEATURE_SEND_ANY_GYRO)
dmp.packet_length += 6;
if (mask & (DMP_FEATURE_LP_QUAT | DMP_FEATURE_6X_LP_QUAT))
dmp.packet_length += 16;
if (mask & (DMP_FEATURE_TAP | DMP_FEATURE_ANDROID_ORIENT))
dmp.packet_length += 4;
return 0;
}
/**
* @brief Get list of currently enabled DMP features.
* @param[out] Mask of enabled features.
* @return 0 if successful.
*/
int dmp_get_enabled_features(unsigned short *mask)
{
mask[0] = dmp.feature_mask;
return 0;
}
/**
* @brief Calibrate the gyro data in the DMP.
* After eight seconds of no motion, the DMP will compute gyro biases and
* subtract them from the quaternion output. If @e dmp_enable_feature is
* called with @e DMP_FEATURE_SEND_CAL_GYRO, the biases will also be
* subtracted from the gyro output.
* @param[in] enable 1 to enable gyro calibration.
* @return 0 if successful.
*/
int dmp_enable_gyro_cal(unsigned char enable)
{
if (enable) {
unsigned char regs[9] = {0xb8, 0xaa, 0xb3, 0x8d, 0xb4, 0x98, 0x0d, 0x35, 0x5d};
return mpu_write_mem(CFG_MOTION_BIAS, 9, regs);
} else {
unsigned char regs[9] = {0xb8, 0xaa, 0xaa, 0xaa, 0xb0, 0x88, 0xc3, 0xc5, 0xc7};
return mpu_write_mem(CFG_MOTION_BIAS, 9, regs);
}
}
/**
* @brief Generate 3-axis quaternions from the DMP.
* In this driver, the 3-axis and 6-axis DMP quaternion features are mutually
* exclusive.
* @param[in] enable 1 to enable 3-axis quaternion.
* @return 0 if successful.
*/
int dmp_enable_lp_quat(unsigned char enable)
{
unsigned char regs[4];
if (enable) {
regs[0] = DINBC0;
regs[1] = DINBC2;
regs[2] = DINBC4;
regs[3] = DINBC6;
}
else
memset(regs, 0x8B, 4);
mpu_write_mem(CFG_LP_QUAT, 4, regs);
return mpu_reset_fifo();
}
/**
* @brief Generate 6-axis quaternions from the DMP.
* In this driver, the 3-axis and 6-axis DMP quaternion features are mutually
* exclusive.
* @param[in] enable 1 to enable 6-axis quaternion.
* @return 0 if successful.
*/
int dmp_enable_6x_lp_quat(unsigned char enable)
{
unsigned char regs[4];
if (enable) {
regs[0] = DINA20;
regs[1] = DINA28;
regs[2] = DINA30;
regs[3] = DINA38;
} else
memset(regs, 0xA3, 4);
mpu_write_mem(CFG_8, 4, regs);
return mpu_reset_fifo();
}
/**
* @brief Decode the four-byte gesture data and execute any callbacks.
* @param[in] gesture Gesture data from DMP packet.
* @return 0 if successful.
*/
static int decode_gesture(unsigned char *gesture)
{
unsigned char tap, android_orient;
android_orient = gesture[3] & 0xC0;
tap = 0x3F & gesture[3];
if (gesture[1] & INT_SRC_TAP) {
unsigned char direction, count;
direction = tap >> 3;
count = (tap % 8) + 1;
if (dmp.tap_cb)
dmp.tap_cb(direction, count);
}
if (gesture[1] & INT_SRC_ANDROID_ORIENT) {
if (dmp.android_orient_cb)
dmp.android_orient_cb(android_orient >> 6);
}
return 0;
}
/**
* @brief Specify when a DMP interrupt should occur.
* A DMP interrupt can be configured to trigger on either of the two
* conditions below:
* \n a. One FIFO period has elapsed (set by @e mpu_set_sample_rate).
* \n b. A tap event has been detected.
* @param[in] mode DMP_INT_GESTURE or DMP_INT_CONTINUOUS.
* @return 0 if successful.
*/
int dmp_set_interrupt_mode(unsigned char mode)
{
const unsigned char regs_continuous[11] =
{0xd8, 0xb1, 0xb9, 0xf3, 0x8b, 0xa3, 0x91, 0xb6, 0x09, 0xb4, 0xd9};
const unsigned char regs_gesture[11] =
{0xda, 0xb1, 0xb9, 0xf3, 0x8b, 0xa3, 0x91, 0xb6, 0xda, 0xb4, 0xda};
switch (mode) {
case DMP_INT_CONTINUOUS:
return mpu_write_mem(CFG_FIFO_ON_EVENT, 11,
(unsigned char*)regs_continuous);
case DMP_INT_GESTURE:
return mpu_write_mem(CFG_FIFO_ON_EVENT, 11,
(unsigned char*)regs_gesture);
default:
return -1;
}
}
/**
* @brief Get one packet from the FIFO.
* If @e sensors does not contain a particular sensor, disregard the data
* returned to that pointer.
* \n @e sensors can contain a combination of the following flags:
* \n INV_X_GYRO, INV_Y_GYRO, INV_Z_GYRO
* \n INV_XYZ_GYRO
* \n INV_XYZ_ACCEL
* \n INV_WXYZ_QUAT
* \n If the FIFO has no new data, @e sensors will be zero.
* \n If the FIFO is disabled, @e sensors will be zero and this function will
* return a non-zero error code.
* @param[out] gyro Gyro data in hardware units.
* @param[out] accel Accel data in hardware units.
* @param[out] quat 3-axis quaternion data in hardware units.
* @param[out] timestamp Timestamp in milliseconds.
* @param[out] sensors Mask of sensors read from FIFO.
* @param[out] more Number of remaining packets.
* @return 0 if successful.
*/
int dmp_read_fifo(short *gyro, short *accel, long *quat,
unsigned long *timestamp, short *sensors, unsigned char *more)
{
unsigned char fifo_data[MAX_PACKET_LENGTH];
unsigned char ii = 0;
/* TODO: sensors[0] only changes when dmp_enable_feature is called. We can
* cache this value and save some cycles.
*/
sensors[0] = 0;
/* Get a packet. */
if (mpu_read_fifo_stream(dmp.packet_length, fifo_data, more))
return -1;
/* Parse DMP packet. */
if (dmp.feature_mask & (DMP_FEATURE_LP_QUAT | DMP_FEATURE_6X_LP_QUAT)) {
#ifdef FIFO_CORRUPTION_CHECK
long quat_q14[4], quat_mag_sq;
#endif
quat[0] = ((long)fifo_data[0] << 24) | ((long)fifo_data[1] << 16) |
((long)fifo_data[2] << 8) | fifo_data[3];
quat[1] = ((long)fifo_data[4] << 24) | ((long)fifo_data[5] << 16) |
((long)fifo_data[6] << 8) | fifo_data[7];
quat[2] = ((long)fifo_data[8] << 24) | ((long)fifo_data[9] << 16) |
((long)fifo_data[10] << 8) | fifo_data[11];
quat[3] = ((long)fifo_data[12] << 24) | ((long)fifo_data[13] << 16) |
((long)fifo_data[14] << 8) | fifo_data[15];
ii += 16;
#ifdef FIFO_CORRUPTION_CHECK
/* We can detect a corrupted FIFO by monitoring the quaternion data and
* ensuring that the magnitude is always normalized to one. This
* shouldn't happen in normal operation, but if an I2C error occurs,
* the FIFO reads might become misaligned.
*
* Let's start by scaling down the quaternion data to avoid long long
* math.
*/
quat_q14[0] = quat[0] >> 16;
quat_q14[1] = quat[1] >> 16;
quat_q14[2] = quat[2] >> 16;
quat_q14[3] = quat[3] >> 16;
quat_mag_sq = quat_q14[0] * quat_q14[0] + quat_q14[1] * quat_q14[1] +
quat_q14[2] * quat_q14[2] + quat_q14[3] * quat_q14[3];
if ((quat_mag_sq < QUAT_MAG_SQ_MIN) ||
(quat_mag_sq > QUAT_MAG_SQ_MAX)) {
/* Quaternion is outside of the acceptable threshold. */
mpu_reset_fifo();
sensors[0] = 0;
return -1;
}
sensors[0] |= INV_WXYZ_QUAT;
#endif
}
if (dmp.feature_mask & DMP_FEATURE_SEND_RAW_ACCEL) {
accel[0] = ((short)fifo_data[ii+0] << 8) | fifo_data[ii+1];
accel[1] = ((short)fifo_data[ii+2] << 8) | fifo_data[ii+3];
accel[2] = ((short)fifo_data[ii+4] << 8) | fifo_data[ii+5];
ii += 6;
sensors[0] |= INV_XYZ_ACCEL;
}
if (dmp.feature_mask & DMP_FEATURE_SEND_ANY_GYRO) {
gyro[0] = ((short)fifo_data[ii+0] << 8) | fifo_data[ii+1];
gyro[1] = ((short)fifo_data[ii+2] << 8) | fifo_data[ii+3];
gyro[2] = ((short)fifo_data[ii+4] << 8) | fifo_data[ii+5];
ii += 6;
sensors[0] |= INV_XYZ_GYRO;
}
/* Gesture data is at the end of the DMP packet. Parse it and call
* the gesture callbacks (if registered).
*/
if (dmp.feature_mask & (DMP_FEATURE_TAP | DMP_FEATURE_ANDROID_ORIENT))
decode_gesture(fifo_data + ii);
get_ms(timestamp);
return 0;
}
/**
* @brief Register a function to be executed on a tap event.
* The tap direction is represented by one of the following:
* \n TAP_X_UP
* \n TAP_X_DOWN
* \n TAP_Y_UP
* \n TAP_Y_DOWN
* \n TAP_Z_UP
* \n TAP_Z_DOWN
* @param[in] func Callback function.
* @return 0 if successful.
*/
int dmp_register_tap_cb(void (*func)(unsigned char, unsigned char))
{
dmp.tap_cb = func;
return 0;
}
/**
* @brief Register a function to be executed on a android orientation event.
* @param[in] func Callback function.
* @return 0 if successful.
*/
int dmp_register_android_orient_cb(void (*func)(unsigned char))
{
dmp.android_orient_cb = func;
return 0;
}
/**
* @}
*/
(2)inv_mpu_dmp_motion_driver.h
/*
$License:
Copyright (C) 2011-2012 InvenSense Corporation, All Rights Reserved.
See included License.txt for License information.
$
*/
/**
* @addtogroup DRIVERS Sensor Driver Layer
* @brief Hardware drivers to communicate with sensors via I2C.
*
* @{
* @file inv_mpu_dmp_motion_driver.h
* @brief DMP image and interface functions.
* @details All functions are preceded by the dmp_ prefix to
* differentiate among MPL and general driver function calls.
*/
#ifndef _INV_MPU_DMP_MOTION_DRIVER_H_
#define _INV_MPU_DMP_MOTION_DRIVER_H_
#define TAP_X (0x01)
#define TAP_Y (0x02)
#define TAP_Z (0x04)
#define TAP_XYZ (0x07)
#define TAP_X_UP (0x01)
#define TAP_X_DOWN (0x02)
#define TAP_Y_UP (0x03)
#define TAP_Y_DOWN (0x04)
#define TAP_Z_UP (0x05)
#define TAP_Z_DOWN (0x06)
#define ANDROID_ORIENT_PORTRAIT (0x00)
#define ANDROID_ORIENT_LANDSCAPE (0x01)
#define ANDROID_ORIENT_REVERSE_PORTRAIT (0x02)
#define ANDROID_ORIENT_REVERSE_LANDSCAPE (0x03)
#define DMP_INT_GESTURE (0x01)
#define DMP_INT_CONTINUOUS (0x02)
#define DMP_FEATURE_TAP (0x001)
#define DMP_FEATURE_ANDROID_ORIENT (0x002)
#define DMP_FEATURE_LP_QUAT (0x004)
#define DMP_FEATURE_PEDOMETER (0x008)
#define DMP_FEATURE_6X_LP_QUAT (0x010)
#define DMP_FEATURE_GYRO_CAL (0x020)
#define DMP_FEATURE_SEND_RAW_ACCEL (0x040)
#define DMP_FEATURE_SEND_RAW_GYRO (0x080)
#define DMP_FEATURE_SEND_CAL_GYRO (0x100)
#define INV_WXYZ_QUAT (0x100)
/* Set up functions. */
int dmp_load_motion_driver_firmware(void);
int dmp_set_fifo_rate(unsigned short rate);
int dmp_get_fifo_rate(unsigned short *rate);
int dmp_enable_feature(unsigned short mask);
int dmp_get_enabled_features(unsigned short *mask);
int dmp_set_interrupt_mode(unsigned char mode);
int dmp_set_orientation(unsigned short orient);
int dmp_set_gyro_bias(long *bias);
int dmp_set_accel_bias(long *bias);
/* Tap functions. */
int dmp_register_tap_cb(void (*func)(unsigned char, unsigned char));
int dmp_set_tap_thresh(unsigned char axis, unsigned short thresh);
int dmp_set_tap_axes(unsigned char axis);
int dmp_set_tap_count(unsigned char min_taps);
int dmp_set_tap_time(unsigned short time);
int dmp_set_tap_time_multi(unsigned short time);
int dmp_set_shake_reject_thresh(long sf, unsigned short thresh);
int dmp_set_shake_reject_time(unsigned short time);
int dmp_set_shake_reject_timeout(unsigned short time);
/* Android orientation functions. */
int dmp_register_android_orient_cb(void (*func)(unsigned char));
/* LP quaternion functions. */
int dmp_enable_lp_quat(unsigned char enable);
int dmp_enable_6x_lp_quat(unsigned char enable);
/* Pedometer functions. */
int dmp_get_pedometer_step_count(unsigned long *count);
int dmp_set_pedometer_step_count(unsigned long count);
int dmp_get_pedometer_walk_time(unsigned long *time);
int dmp_set_pedometer_walk_time(unsigned long time);
/* DMP gyro calibration functions. */
int dmp_enable_gyro_cal(unsigned char enable);
/* Read function. This function should be called whenever the MPU interrupt is
* detected.
*/
int dmp_read_fifo(short *gyro, short *accel, long *quat,
unsigned long *timestamp, short *sensors, unsigned char *more);
#endif /* #ifndef _INV_MPU_DMP_MOTION_DRIVER_H_ */
(3) inv_mpu.c
/*
$License:
Copyright (C) 2011-2012 InvenSense Corporation, All Rights Reserved.
See included License.txt for License information.
$
*/
/**
* @addtogroup DRIVERS Sensor Driver Layer
* @brief Hardware drivers to communicate with sensors via I2C.
*
* @{
* @file inv_mpu.c
* @brief An I2C-based driver for Invensense gyroscopes.
* @details This driver currently works for the following devices:
* MPU6050
* MPU6500
* MPU9150 (or MPU6050 w/ AK8975 on the auxiliary bus)
* MPU9250 (or MPU6500 w/ AK8963 on the auxiliary bus)
*/
#include <stdio.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "inv_mpu.h"
/* The following functions must be defined for this platform:
* i2c_write(unsigned char slave_addr, unsigned char reg_addr,
* unsigned char length, unsigned char const *data)
* i2c_read(unsigned char slave_addr, unsigned char reg_addr,
* unsigned char length, unsigned char *data)
* delay_ms(unsigned long num_ms)
* get_ms(unsigned long *count)
* reg_int_cb(void (*cb)(void), unsigned char port, unsigned char pin)
* labs(long x)
* fabsf(float x)
* min(int a, int b)
*/
/***********以下为自己定义的系统平台,在STM32F103ZE上运行***************************/
#if defined STM32F10X_HD //在编译器中定义 STM32F10X_HD 则使用这段,以下的系统平台将不会用到
#define MPU_Device_Adrr MPU6500_device_addr //定义器件I2C地址,在定义变量st.hw.addr时用到
#include "mpu6500_driver.h"
#include "delay.h"
#include "timer.h"
#include "stdio.h"
#define i2c_write MPU6500_Write_Len
#define i2c_read MPU6500_Read_Len
#define delay_ms Delay_ms
#define get_ms Get_Timer2_ms
//static inline int reg_int_cb(struct int_param_s *int_param)
//{
// return msp430_reg_int_cb(int_param->cb, int_param->pin, int_param->lp_exit,
// int_param->active_low);
//}
#define log_i printf //打印信息
#define log_e printf //打印信息
/* labs is already defined by TI's toolchain. */
/* fabs is for doubles. fabsf is for floats. */
#define fabs fabsf
#define min(a,b) ((a<b)?a:b)
/***************************************************/
#elif defined MOTION_DRIVER_TARGET_MSP430
#include "msp430.h"
#include "msp430_i2c.h"
#include "msp430_clock.h"
#include "msp430_interrupt.h"
#define i2c_write msp430_i2c_write
#define i2c_read msp430_i2c_read
#define delay_ms msp430_delay_ms
#define get_ms msp430_get_clock_ms
static inline int reg_int_cb(struct int_param_s *int_param)
{
return msp430_reg_int_cb(int_param->cb, int_param->pin, int_param->lp_exit,
int_param->active_low);
}
#define log_i(...) do {} while (0)
#define log_e(...) do {} while (0)
/* labs is already defined by TI's toolchain. */
/* fabs is for doubles. fabsf is for floats. */
#define fabs fabsf
#define min(a,b) ((a<b)?a:b)
#elif defined EMPL_TARGET_MSP430
#include "msp430.h"
#include "msp430_i2c.h"
#include "msp430_clock.h"
#include "msp430_interrupt.h"
#include "log.h"
#define i2c_write msp430_i2c_write
#define i2c_read msp430_i2c_read
#define delay_ms msp430_delay_ms
#define get_ms msp430_get_clock_ms
static inline int reg_int_cb(struct int_param_s *int_param)
{
return msp430_reg_int_cb(int_param->cb, int_param->pin, int_param->lp_exit,
int_param->active_low);
}
#define log_i MPL_LOGI
#define log_e MPL_LOGE
/* labs is already defined by TI's toolchain. */
/* fabs is for doubles. fabsf is for floats. */
#define fabs fabsf
#define min(a,b) ((a<b)?a:b)
#elif defined EMPL_TARGET_UC3L0
/* Instead of using the standard TWI driver from the ASF library, we're using
* a TWI driver that follows the slave address + register address convention.
*/
#include "twi.h"
#include "delay.h"
#include "sysclk.h"
#include "log.h"
#include "sensors_xplained.h"
#include "uc3l0_clock.h"
#define i2c_write(a, b, c, d) twi_write(a, b, d, c)
#define i2c_read(a, b, c, d) twi_read(a, b, d, c)
/* delay_ms is a function already defined in ASF. */
#define get_ms uc3l0_get_clock_ms
static inline int reg_int_cb(struct int_param_s *int_param)
{
sensor_board_irq_connect(int_param->pin, int_param->cb, int_param->arg);
return 0;
}
#define log_i MPL_LOGI
#define log_e MPL_LOGE
/* UC3 is a 32-bit processor, so abs and labs are equivalent. */
#define labs abs
#define fabs(x) (((x)>0)?(x):-(x))
#else
#error Gyro driver is missing the system layer implementations.
#endif
#if !defined MPU6050 && !defined MPU9150 && !defined MPU6500 && !defined MPU9250
#error Which gyro are you using? Define MPUxxxx in your compiler options.
#endif
/* Time for some messy macro work. =]
* #define MPU9150
* is equivalent to..
* #define MPU6050
* #define AK8975_SECONDARY
*
* #define MPU9250
* is equivalent to..
* #define MPU6500
* #define AK8963_SECONDARY
*/
#if defined MPU9150
#ifndef MPU6050
#define MPU6050
#endif /* #ifndef MPU6050 */
#if defined AK8963_SECONDARY
#error "MPU9150 and AK8963_SECONDARY cannot both be defined."
#elif !defined AK8975_SECONDARY /* #if defined AK8963_SECONDARY */
#define AK8975_SECONDARY
#endif /* #if defined AK8963_SECONDARY */
#elif defined MPU9250 /* #if defined MPU9150 */
#ifndef MPU6500
#define MPU6500
#endif /* #ifndef MPU6500 */
#if defined AK8975_SECONDARY
#error "MPU9250 and AK8975_SECONDARY cannot both be defined."
#elif !defined AK8963_SECONDARY /* #if defined AK8975_SECONDARY */
#define AK8963_SECONDARY
#endif /* #if defined AK8975_SECONDARY */
#endif /* #if defined MPU9150 */
#if defined AK8975_SECONDARY || defined AK8963_SECONDARY
#define AK89xx_SECONDARY
#else
/* #warning "No compass = less profit for Invensense. Lame." */
#endif
static int set_int_enable(unsigned char enable);
/* Hardware registers needed by driver. */
struct gyro_reg_s {
unsigned char who_am_i;
unsigned char rate_div;
unsigned char lpf;
unsigned char prod_id;
unsigned char user_ctrl;
unsigned char fifo_en;
unsigned char gyro_cfg;
unsigned char accel_cfg;
unsigned char accel_cfg2;
unsigned char lp_accel_odr;
unsigned char motion_thr;
unsigned char motion_dur;
unsigned char fifo_count_h;
unsigned char fifo_r_w;
unsigned char raw_gyro;
unsigned char raw_accel;
unsigned char temp;
unsigned char int_enable;
unsigned char dmp_int_status;
unsigned char int_status;
unsigned char accel_intel;
unsigned char pwr_mgmt_1;
unsigned char pwr_mgmt_2;
unsigned char int_pin_cfg;
unsigned char mem_r_w;
unsigned char accel_offs;
unsigned char i2c_mst;
unsigned char bank_sel;
unsigned char mem_start_addr;
unsigned char prgm_start_h;
#if defined AK89xx_SECONDARY
unsigned char s0_addr;
unsigned char s0_reg;
unsigned char s0_ctrl;
unsigned char s1_addr;
unsigned char s1_reg;
unsigned char s1_ctrl;
unsigned char s4_ctrl;
unsigned char s0_do;
unsigned char s1_do;
unsigned char i2c_delay_ctrl;
unsigned char raw_compass;
/* The I2C_MST_VDDIO bit is in this register. */
unsigned char yg_offs_tc;
#endif
};
/* Information specific to a particular device. */
struct hw_s {
unsigned char addr;
unsigned short max_fifo;
unsigned char num_reg;
unsigned short temp_sens;
short temp_offset;
unsigned short bank_size;
#if defined AK89xx_SECONDARY
unsigned short compass_fsr;
#endif
};
/* When entering motion interrupt mode, the driver keeps track of the
* previous state so that it can be restored at a later time.
* TODO: This is tacky. Fix it.
*/
struct motion_int_cache_s {
unsigned short gyro_fsr;
unsigned char accel_fsr;
unsigned short lpf;
unsigned short sample_rate;
unsigned char sensors_on;
unsigned char fifo_sensors;
unsigned char dmp_on;
};
/* Cached chip configuration data.
* TODO: A lot of these can be handled with a bitmask.
*/
struct chip_cfg_s {
/* Matches gyro_cfg >> 3 & 0x03 */
unsigned char gyro_fsr;
/* Matches accel_cfg >> 3 & 0x03 */
unsigned char accel_fsr;
/* Enabled sensors. Uses same masks as fifo_en, NOT pwr_mgmt_2. */
unsigned char sensors;
/* Matches config register. */
unsigned char lpf;
unsigned char clk_src;
/* Sample rate, NOT rate divider. */
unsigned short sample_rate;
/* Matches fifo_en register. */
unsigned char fifo_enable;
/* Matches int enable register. */
unsigned char int_enable;
/* 1 if devices on auxiliary I2C bus appear on the primary. */
unsigned char bypass_mode;
/* 1 if half-sensitivity.
* NOTE: This doesn't belong here, but everything else in hw_s is const,
* and this allows us to save some precious RAM.
*/
unsigned char accel_half;
/* 1 if device in low-power accel-only mode. */
unsigned char lp_accel_mode;
/* 1 if interrupts are only triggered on motion events. */
unsigned char int_motion_only;
struct motion_int_cache_s cache;
/* 1 for active low interrupts. */
unsigned char active_low_int;
/* 1 for latched interrupts. */
unsigned char latched_int;
/* 1 if DMP is enabled. */
unsigned char dmp_on;
/* Ensures that DMP will only be loaded once. */
unsigned char dmp_loaded;
/* Sampling rate used when DMP is enabled. */
unsigned short dmp_sample_rate;
#ifdef AK89xx_SECONDARY
/* Compass sample rate. */
unsigned short compass_sample_rate;
unsigned char compass_addr;
short mag_sens_adj[3];
#endif
};
/* Information for self-test. */
struct test_s {
unsigned long gyro_sens;
unsigned long accel_sens;
unsigned char reg_rate_div;
unsigned char reg_lpf;
unsigned char reg_gyro_fsr;
unsigned char reg_accel_fsr;
unsigned short wait_ms;
unsigned char packet_thresh;
float min_dps;
float max_dps;
float max_gyro_var;
float min_g;
float max_g;
float max_accel_var;
};
/* Gyro driver state variables. */
struct gyro_state_s {
const struct gyro_reg_s *reg;
const struct hw_s *hw;
struct chip_cfg_s chip_cfg;
const struct test_s *test;
};
/* Filter configurations. */
enum lpf_e {
INV_FILTER_256HZ_NOLPF2 = 0,
INV_FILTER_188HZ,
INV_FILTER_98HZ,
INV_FILTER_42HZ,
INV_FILTER_20HZ,
INV_FILTER_10HZ,
INV_FILTER_5HZ,
INV_FILTER_2100HZ_NOLPF,
NUM_FILTER
};
/* Full scale ranges. */
enum gyro_fsr_e {
INV_FSR_250DPS = 0,
INV_FSR_500DPS,
INV_FSR_1000DPS,
INV_FSR_2000DPS,
NUM_GYRO_FSR
};
/* Full scale ranges. */
enum accel_fsr_e {
INV_FSR_2G = 0,
INV_FSR_4G,
INV_FSR_8G,
INV_FSR_16G,
NUM_ACCEL_FSR
};
/* Clock sources. */
enum clock_sel_e {
INV_CLK_INTERNAL = 0,
INV_CLK_PLL,
NUM_CLK
};
/* Low-power accel wakeup rates. */
enum lp_accel_rate_e {
#if defined MPU6050
INV_LPA_1_25HZ,
INV_LPA_5HZ,
INV_LPA_20HZ,
INV_LPA_40HZ
#elif defined MPU6500
INV_LPA_0_3125HZ,
INV_LPA_0_625HZ,
INV_LPA_1_25HZ,
INV_LPA_2_5HZ,
INV_LPA_5HZ,
INV_LPA_10HZ,
INV_LPA_20HZ,
INV_LPA_40HZ,
INV_LPA_80HZ,
INV_LPA_160HZ,
INV_LPA_320HZ,
INV_LPA_640HZ
#endif
};
#define BIT_I2C_MST_VDDIO (0x80)
#define BIT_FIFO_EN (0x40)
#define BIT_DMP_EN (0x80)
#define BIT_FIFO_RST (0x04)
#define BIT_DMP_RST (0x08)
#define BIT_FIFO_OVERFLOW (0x10)
#define BIT_DATA_RDY_EN (0x01)
#define BIT_DMP_INT_EN (0x02)
#define BIT_MOT_INT_EN (0x40)
#define BITS_FSR (0x18)
#define BITS_LPF (0x07)
#define BITS_HPF (0x07)
#define BITS_CLK (0x07)
#define BIT_FIFO_SIZE_1024 (0x40)
#define BIT_FIFO_SIZE_2048 (0x80)
#define BIT_FIFO_SIZE_4096 (0xC0)
#define BIT_RESET (0x80)
#define BIT_SLEEP (0x40)
#define BIT_S0_DELAY_EN (0x01)
#define BIT_S2_DELAY_EN (0x04)
#define BITS_SLAVE_LENGTH (0x0F)
#define BIT_SLAVE_BYTE_SW (0x40)
#define BIT_SLAVE_GROUP (0x10)
#define BIT_SLAVE_EN (0x80)
#define BIT_I2C_READ (0x80)
#define BITS_I2C_MASTER_DLY (0x1F)
#define BIT_AUX_IF_EN (0x20)
#define BIT_ACTL (0x80)
#define BIT_LATCH_EN (0x20)
#define BIT_ANY_RD_CLR (0x10)
#define BIT_BYPASS_EN (0x02)
#define BITS_WOM_EN (0xC0)
#define BIT_LPA_CYCLE (0x20)
#define BIT_STBY_XA (0x20)
#define BIT_STBY_YA (0x10)
#define BIT_STBY_ZA (0x08)
#define BIT_STBY_XG (0x04)
#define BIT_STBY_YG (0x02)
#define BIT_STBY_ZG (0x01)
#define BIT_STBY_XYZA (BIT_STBY_XA | BIT_STBY_YA | BIT_STBY_ZA)
#define BIT_STBY_XYZG (BIT_STBY_XG | BIT_STBY_YG | BIT_STBY_ZG)
#if defined AK8975_SECONDARY
#define SUPPORTS_AK89xx_HIGH_SENS (0x00)
#define AK89xx_FSR (9830)
#elif defined AK8963_SECONDARY
#define SUPPORTS_AK89xx_HIGH_SENS (0x10)
#define AK89xx_FSR (4915)
#endif
#ifdef AK89xx_SECONDARY
#define AKM_REG_WHOAMI (0x00)
#define AKM_REG_ST1 (0x02)
#define AKM_REG_HXL (0x03)
#define AKM_REG_ST2 (0x09)
#define AKM_REG_CNTL (0x0A)
#define AKM_REG_ASTC (0x0C)
#define AKM_REG_ASAX (0x10)
#define AKM_REG_ASAY (0x11)
#define AKM_REG_ASAZ (0x12)
#define AKM_DATA_READY (0x01)
#define AKM_DATA_OVERRUN (0x02)
#define AKM_OVERFLOW (0x80)
#define AKM_DATA_ERROR (0x40)
#define AKM_BIT_SELF_TEST (0x40)
#define AKM_POWER_DOWN (0x00 | SUPPORTS_AK89xx_HIGH_SENS)
#define AKM_SINGLE_MEASUREMENT (0x01 | SUPPORTS_AK89xx_HIGH_SENS)
#define AKM_FUSE_ROM_ACCESS (0x0F | SUPPORTS_AK89xx_HIGH_SENS)
#define AKM_MODE_SELF_TEST (0x08 | SUPPORTS_AK89xx_HIGH_SENS)
#define AKM_WHOAMI (0x48)
#endif
#if defined MPU6050
const struct gyro_reg_s reg = {
.who_am_i = 0x75,
.rate_div = 0x19,
.lpf = 0x1A,
.prod_id = 0x0C,
.user_ctrl = 0x6A,
.fifo_en = 0x23,
.gyro_cfg = 0x1B,
.accel_cfg = 0x1C,
.motion_thr = 0x1F,
.motion_dur = 0x20,
.fifo_count_h = 0x72,
.fifo_r_w = 0x74,
.raw_gyro = 0x43,
.raw_accel = 0x3B,
.temp = 0x41,
.int_enable = 0x38,
.dmp_int_status = 0x39,
.int_status = 0x3A,
.pwr_mgmt_1 = 0x6B,
.pwr_mgmt_2 = 0x6C,
.int_pin_cfg = 0x37,
.mem_r_w = 0x6F,
.accel_offs = 0x06,
.i2c_mst = 0x24,
.bank_sel = 0x6D,
.mem_start_addr = 0x6E,
.prgm_start_h = 0x70
#ifdef AK89xx_SECONDARY
,.raw_compass = 0x49,
.yg_offs_tc = 0x01,
.s0_addr = 0x25,
.s0_reg = 0x26,
.s0_ctrl = 0x27,
.s1_addr = 0x28,
.s1_reg = 0x29,
.s1_ctrl = 0x2A,
.s4_ctrl = 0x34,
.s0_do = 0x63,
.s1_do = 0x64,
.i2c_delay_ctrl = 0x67
#endif
};
const struct hw_s hw = {
.addr = 0x68,
.max_fifo = 1024,
.num_reg = 118,
.temp_sens = 340,
.temp_offset = -521,
.bank_size = 256
#if defined AK89xx_SECONDARY
,.compass_fsr = AK89xx_FSR
#endif
};
const struct test_s test = {
.gyro_sens = 32768/250,
.accel_sens = 32768/16,
.reg_rate_div = 0, /* 1kHz. */
.reg_lpf = 1, /* 188Hz. */
.reg_gyro_fsr = 0, /* 250dps. */
.reg_accel_fsr = 0x18, /* 16g. */
.wait_ms = 50,
.packet_thresh = 5, /* 5% */
.min_dps = 10.f,
.max_dps = 105.f,
.max_gyro_var = 0.14f,
.min_g = 0.3f,
.max_g = 0.95f,
.max_accel_var = 0.14f
};
static struct gyro_state_s st = {
.reg = ®,
.hw = &hw,
.test = &test
};
#elif defined MPU6500
const struct gyro_reg_s reg = {
.who_am_i = 0x75,
.rate_div = 0x19,
.lpf = 0x1A,
.prod_id = 0x0C,
.user_ctrl = 0x6A,
.fifo_en = 0x23,
.gyro_cfg = 0x1B,
.accel_cfg = 0x1C,
.accel_cfg2 = 0x1D,
.lp_accel_odr = 0x1E,
.motion_thr = 0x1F,
.motion_dur = 0x20,
.fifo_count_h = 0x72,
.fifo_r_w = 0x74,
.raw_gyro = 0x43,
.raw_accel = 0x3B,
.temp = 0x41,
.int_enable = 0x38,
.dmp_int_status = 0x39,
.int_status = 0x3A,
.accel_intel = 0x69,
.pwr_mgmt_1 = 0x6B,
.pwr_mgmt_2 = 0x6C,
.int_pin_cfg = 0x37,
.mem_r_w = 0x6F,
.accel_offs = 0x77,
.i2c_mst = 0x24,
.bank_sel = 0x6D,
.mem_start_addr = 0x6E,
.prgm_start_h = 0x70
#ifdef AK89xx_SECONDARY
,.raw_compass = 0x49,
.s0_addr = 0x25,
.s0_reg = 0x26,
.s0_ctrl = 0x27,
.s1_addr = 0x28,
.s1_reg = 0x29,
.s1_ctrl = 0x2A,
.s4_ctrl = 0x34,
.s0_do = 0x63,
.s1_do = 0x64,
.i2c_delay_ctrl = 0x67
#endif
};
const struct hw_s hw = {
.addr = MPU_Device_Adrr,
.max_fifo = 1024,
.num_reg = 128,
.temp_sens = 321,
.temp_offset = 0,
.bank_size = 256
#if defined AK89xx_SECONDARY
,.compass_fsr = AK89xx_FSR
#endif
};
const struct test_s test = {
.gyro_sens = 32768/250,
.accel_sens = 32768/16,
.reg_rate_div = 0, /* 1kHz. */
.reg_lpf = 1, /* 188Hz. */
.reg_gyro_fsr = 0, /* 250dps. */
.reg_accel_fsr = 0x18, /* 16g. */
.wait_ms = 50,
.packet_thresh = 5, /* 5% */
.min_dps = 10.f,
.max_dps = 105.f,
.max_gyro_var = 0.14f,
.min_g = 0.3f,
.max_g = 0.95f,
.max_accel_var = 0.14f
};
static struct gyro_state_s st = {
.reg = ®,
.hw = &hw,
.test = &test
};
#endif
#define MAX_PACKET_LENGTH (12)
#ifdef AK89xx_SECONDARY
int setup_compass(void);
#define MAX_COMPASS_SAMPLE_RATE (100)
#endif
/**
* @brief Enable/disable data ready interrupt.
* If the DMP is on, the DMP interrupt is enabled. Otherwise, the data ready
* interrupt is used.
* @param[in] enable 1 to enable interrupt.
* @return 0 if successful.
*/
static int set_int_enable(unsigned char enable)
{
unsigned char tmp;
if (st.chip_cfg.dmp_on) {
if (enable)
tmp = BIT_DMP_INT_EN;
else
tmp = 0x00;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, &tmp))
return -1;
st.chip_cfg.int_enable = tmp;
} else {
if (!st.chip_cfg.sensors)
return -1;
if (enable && st.chip_cfg.int_enable)
return 0;
if (enable)
tmp = BIT_DATA_RDY_EN;
else
tmp = 0x00;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, &tmp))
return -1;
st.chip_cfg.int_enable = tmp;
}
return 0;
}
/**
* @brief Register dump for testing.
* @return 0 if successful.
*/
int mpu_reg_dump(void)
{
unsigned char ii;
unsigned char data;
for (ii = 0; ii < st.hw->num_reg; ii++) {
if (ii == st.reg->fifo_r_w || ii == st.reg->mem_r_w)
continue;
if (i2c_read(st.hw->addr, ii, 1, &data))
return -1;
log_i("%#5x: %#5x\r\n", ii, data);
}
return 0;
}
/**
* @brief Read from a single register.
* NOTE: The memory and FIFO read/write registers cannot be accessed.
* @param[in] reg Register address.
* @param[out] data Register data.
* @return 0 if successful.
*/
int mpu_read_reg(unsigned char reg, unsigned char *data)
{
if (reg == st.reg->fifo_r_w || reg == st.reg->mem_r_w)
return -1;
if (reg >= st.hw->num_reg)
return -1;
return i2c_read(st.hw->addr, reg, 1, data);
}
/**
* @brief Initialize hardware.
* Initial configuration:\n
* Gyro FSR: +/- 2000DPS\n
* Accel FSR +/- 2G\n
* DLPF: 42Hz\n
* FIFO rate: 50Hz\n
* Clock source: Gyro PLL\n
* FIFO: Disabled.\n
* Data ready interrupt: Disabled, active low, unlatched.
* @param[in] int_param Platform-specific parameters to interrupt API.
* @return 0 if successful.
*/
int mpu_init(struct int_param_s *int_param)
{
unsigned char data[6];
/* Reset device. */
data[0] = BIT_RESET;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, data))
return -1;
delay_ms(100);
/* Wake up chip. */
data[0] = 0x00;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, data))
return -1;
#if defined MPU6050
/* Check product revision. */
if (i2c_read(st.hw->addr, st.reg->accel_offs, 6, data))
return -1;
rev = ((data[5] & 0x01) << 2) | ((data[3] & 0x01) << 1) |
(data[1] & 0x01);
if (rev) {
/* Congrats, these parts are better. */
if (rev == 1)
st.chip_cfg.accel_half = 1;
else if (rev == 2)
st.chip_cfg.accel_half = 0;
else {
log_e("Unsupported software product rev %d.\n", rev);
return -1;
}
} else {
if (i2c_read(st.hw->addr, st.reg->prod_id, 1, data))
return -1;
rev = data[0] & 0x0F;
if (!rev) {
log_e("Product ID read as 0 indicates device is either "
"incompatible or an MPU3050.\n");
return -1;
} else if (rev == 4) {
log_i("Half sensitivity part found.\n");
st.chip_cfg.accel_half = 1;
} else
st.chip_cfg.accel_half = 0;
}
#elif defined MPU6500
#define MPU6500_MEM_REV_ADDR (0x17)
// if (mpu_read_mem(MPU6500_MEM_REV_ADDR, 1, &rev))
// return -1;
// if (rev == 0x1)
// st.chip_cfg.accel_half = 0;
// else {
// log_e("Unsupported software product rev %d.\n", rev);
// return -1;
// }
/* MPU6500 shares 4kB of memory between the DMP and the FIFO. Since the
* first 3kB are needed by the DMP, we'll use the last 1kB for the FIFO.
*/
data[0] = BIT_FIFO_SIZE_1024 | 0x8;
if (i2c_write(st.hw->addr, st.reg->accel_cfg2, 1, data))
return -1;
#endif
/* Set to invalid values to ensure no I2C writes are skipped. */
st.chip_cfg.sensors = 0xFF;
st.chip_cfg.gyro_fsr = 0xFF;
st.chip_cfg.accel_fsr = 0xFF;
st.chip_cfg.lpf = 0xFF;
st.chip_cfg.sample_rate = 0xFFFF;
st.chip_cfg.fifo_enable = 0xFF;
st.chip_cfg.bypass_mode = 0xFF;
#ifdef AK89xx_SECONDARY
st.chip_cfg.compass_sample_rate = 0xFFFF;
#endif
/* mpu_set_sensors always preserves this setting. */
st.chip_cfg.clk_src = INV_CLK_PLL;
/* Handled in next call to mpu_set_bypass. */
st.chip_cfg.active_low_int = 1;
st.chip_cfg.latched_int = 0;
st.chip_cfg.int_motion_only = 0;
st.chip_cfg.lp_accel_mode = 0;
memset(&st.chip_cfg.cache, 0, sizeof(st.chip_cfg.cache));
st.chip_cfg.dmp_on = 0;
st.chip_cfg.dmp_loaded = 0;
st.chip_cfg.dmp_sample_rate = 0;
if (mpu_set_gyro_fsr(2000))
return -1;
if (mpu_set_accel_fsr(2))
return -1;
if (mpu_set_lpf(42))
return -1;
if (mpu_set_sample_rate(50))
return -1;
if (mpu_configure_fifo(0))
return -1;
// if (int_param)
// reg_int_cb(int_param); //没用到这个函数
#ifdef AK89xx_SECONDARY
setup_compass();
if (mpu_set_compass_sample_rate(10))
return -1;
#else
/* Already disabled by setup_compass. */
if (mpu_set_bypass(0))
return -1;
#endif
mpu_set_sensors(0);
return 0;
}
/**
* @brief Enter low-power accel-only mode.
* In low-power accel mode, the chip goes to sleep and only wakes up to sample
* the accelerometer at one of the following frequencies:
* \n MPU6050: 1.25Hz, 5Hz, 20Hz, 40Hz
* \n MPU6500: 1.25Hz, 2.5Hz, 5Hz, 10Hz, 20Hz, 40Hz, 80Hz, 160Hz, 320Hz, 640Hz
* \n If the requested rate is not one listed above, the device will be set to
* the next highest rate. Requesting a rate above the maximum supported
* frequency will result in an error.
* \n To select a fractional wake-up frequency, round down the value passed to
* @e rate.
* @param[in] rate Minimum sampling rate, or zero to disable LP
* accel mode.
* @return 0 if successful.
*/
int mpu_lp_accel_mode(unsigned char rate)
{
unsigned char tmp[2];
if (rate > 40)
return -1;
if (!rate) {
mpu_set_int_latched(0);
tmp[0] = 0;
tmp[1] = BIT_STBY_XYZG;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 2, tmp))
return -1;
st.chip_cfg.lp_accel_mode = 0;
return 0;
}
/* For LP accel, we automatically configure the hardware to produce latched
* interrupts. In LP accel mode, the hardware cycles into sleep mode before
* it gets a chance to deassert the interrupt pin; therefore, we shift this
* responsibility over to the MCU.
*
* Any register read will clear the interrupt.
*/
mpu_set_int_latched(1);
#if defined MPU6050
tmp[0] = BIT_LPA_CYCLE;
if (rate == 1) {
tmp[1] = INV_LPA_1_25HZ;
mpu_set_lpf(5);
} else if (rate <= 5) {
tmp[1] = INV_LPA_5HZ;
mpu_set_lpf(5);
} else if (rate <= 20) {
tmp[1] = INV_LPA_20HZ;
mpu_set_lpf(10);
} else {
tmp[1] = INV_LPA_40HZ;
mpu_set_lpf(20);
}
tmp[1] = (tmp[1] << 6) | BIT_STBY_XYZG;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 2, tmp))
return -1;
#elif defined MPU6500
/* Set wake frequency. */
if (rate == 1)
tmp[0] = INV_LPA_1_25HZ;
else if (rate == 2)
tmp[0] = INV_LPA_2_5HZ;
else if (rate <= 5)
tmp[0] = INV_LPA_5HZ;
else if (rate <= 10)
tmp[0] = INV_LPA_10HZ;
else if (rate <= 20)
tmp[0] = INV_LPA_20HZ;
else if (rate <= 40)
tmp[0] = INV_LPA_40HZ;
else if (rate <= 80)
tmp[0] = INV_LPA_80HZ;
else if (rate <= 160)
tmp[0] = INV_LPA_160HZ;
else if (rate <= 320)
tmp[0] = INV_LPA_320HZ;
else
tmp[0] = INV_LPA_640HZ;
if (i2c_write(st.hw->addr, st.reg->lp_accel_odr, 1, tmp))
return -1;
tmp[0] = BIT_LPA_CYCLE;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, tmp))
return -1;
#endif
st.chip_cfg.sensors = INV_XYZ_ACCEL;
st.chip_cfg.clk_src = 0;
st.chip_cfg.lp_accel_mode = 1;
mpu_configure_fifo(0);
return 0;
}
/**
* @brief Read raw gyro data directly from the registers.
* @param[out] data Raw data in hardware units.
* @param[out] timestamp Timestamp in milliseconds. Null if not needed.
* @return 0 if successful.
*/
int mpu_get_gyro_reg(short *data, unsigned long *timestamp)
{
unsigned char tmp[6];
if (!(st.chip_cfg.sensors & INV_XYZ_GYRO))
return -1;
if (i2c_read(st.hw->addr, st.reg->raw_gyro, 6, tmp))
return -1;
data[0] = (tmp[0] << 8) | tmp[1];
data[1] = (tmp[2] << 8) | tmp[3];
data[2] = (tmp[4] << 8) | tmp[5];
if (timestamp)
get_ms(timestamp);
return 0;
}
/**
* @brief Read raw accel data directly from the registers.
* @param[out] data Raw data in hardware units.
* @param[out] timestamp Timestamp in milliseconds. Null if not needed.
* @return 0 if successful.
*/
int mpu_get_accel_reg(short *data, unsigned long *timestamp)
{
unsigned char tmp[6];
if (!(st.chip_cfg.sensors & INV_XYZ_ACCEL))
return -1;
if (i2c_read(st.hw->addr, st.reg->raw_accel, 6, tmp))
return -1;
data[0] = (tmp[0] << 8) | tmp[1];
data[1] = (tmp[2] << 8) | tmp[3];
data[2] = (tmp[4] << 8) | tmp[5];
if (timestamp)
get_ms(timestamp);
return 0;
}
/**
* @brief Read temperature data directly from the registers.
* @param[out] data Data in q16 format.
* @param[out] timestamp Timestamp in milliseconds. Null if not needed.
* @return 0 if successful.
*/
int mpu_get_temperature(long *data, unsigned long *timestamp)
{
unsigned char tmp[2];
short raw;
if (!(st.chip_cfg.sensors))
return -1;
if (i2c_read(st.hw->addr, st.reg->temp, 2, tmp))
return -1;
raw = (tmp[0] << 8) | tmp[1];
if (timestamp)
get_ms(timestamp);
data[0] = (long)((35 + ((raw - (float)st.hw->temp_offset) / st.hw->temp_sens)) * 65536L);
return 0;
}
/**
* @brief Push biases to the accel bias registers.
* This function expects biases relative to the current sensor output, and
* these biases will be added to the factory-supplied values.
* @param[in] accel_bias New biases.
* @return 0 if successful.
*/
int mpu_set_accel_bias(const long *accel_bias)
{
unsigned char data[6];
short accel_hw[3];
short got_accel[3];
short fg[3];
if (!accel_bias)
return -1;
if (!accel_bias[0] && !accel_bias[1] && !accel_bias[2])
return 0;
if (i2c_read(st.hw->addr, 3, 3, data))
return -1;
fg[0] = ((data[0] >> 4) + 8) & 0xf;
fg[1] = ((data[1] >> 4) + 8) & 0xf;
fg[2] = ((data[2] >> 4) + 8) & 0xf;
accel_hw[0] = (short)(accel_bias[0] * 2 / (64 + fg[0]));
accel_hw[1] = (short)(accel_bias[1] * 2 / (64 + fg[1]));
accel_hw[2] = (short)(accel_bias[2] * 2 / (64 + fg[2]));
if (i2c_read(st.hw->addr, 0x06, 6, data))
return -1;
got_accel[0] = ((short)data[0] << 8) | data[1];
got_accel[1] = ((short)data[2] << 8) | data[3];
got_accel[2] = ((short)data[4] << 8) | data[5];
accel_hw[0] += got_accel[0];
accel_hw[1] += got_accel[1];
accel_hw[2] += got_accel[2];
data[0] = (accel_hw[0] >> 8) & 0xff;
data[1] = (accel_hw[0]) & 0xff;
data[2] = (accel_hw[1] >> 8) & 0xff;
data[3] = (accel_hw[1]) & 0xff;
data[4] = (accel_hw[2] >> 8) & 0xff;
data[5] = (accel_hw[2]) & 0xff;
if (i2c_write(st.hw->addr, 0x06, 6, data))
return -1;
return 0;
}
/**
* @brief Reset FIFO read/write pointers.
* @return 0 if successful.
*/
int mpu_reset_fifo(void)
{
unsigned char data;
if (!(st.chip_cfg.sensors))
return -1;
data = 0;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, &data))
return -1;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, &data))
return -1;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &data))
return -1;
if (st.chip_cfg.dmp_on) {
data = BIT_FIFO_RST | BIT_DMP_RST;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &data))
return -1;
delay_ms(50);
data = BIT_DMP_EN | BIT_FIFO_EN;
if (st.chip_cfg.sensors & INV_XYZ_COMPASS)
data |= BIT_AUX_IF_EN;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &data))
return -1;
if (st.chip_cfg.int_enable)
data = BIT_DMP_INT_EN;
else
data = 0;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, &data))
return -1;
data = 0;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, &data))
return -1;
} else {
data = BIT_FIFO_RST;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &data))
return -1;
if (st.chip_cfg.bypass_mode || !(st.chip_cfg.sensors & INV_XYZ_COMPASS))
data = BIT_FIFO_EN;
else
data = BIT_FIFO_EN | BIT_AUX_IF_EN;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &data))
return -1;
delay_ms(50);
if (st.chip_cfg.int_enable)
data = BIT_DATA_RDY_EN;
else
data = 0;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, &data))
return -1;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, &st.chip_cfg.fifo_enable))
return -1;
}
return 0;
}
/**
* @brief Get the gyro full-scale range.
* @param[out] fsr Current full-scale range.
* @return 0 if successful.
*/
int mpu_get_gyro_fsr(unsigned short *fsr)
{
switch (st.chip_cfg.gyro_fsr) {
case INV_FSR_250DPS:
fsr[0] = 250;
break;
case INV_FSR_500DPS:
fsr[0] = 500;
break;
case INV_FSR_1000DPS:
fsr[0] = 1000;
break;
case INV_FSR_2000DPS:
fsr[0] = 2000;
break;
default:
fsr[0] = 0;
break;
}
return 0;
}
/**
* @brief Set the gyro full-scale range.
* @param[in] fsr Desired full-scale range.
* @return 0 if successful.
*/
int mpu_set_gyro_fsr(unsigned short fsr)
{
unsigned char data;
if (!(st.chip_cfg.sensors))
return -1;
switch (fsr) {
case 250:
data = INV_FSR_250DPS << 3;
break;
case 500:
data = INV_FSR_500DPS << 3;
break;
case 1000:
data = INV_FSR_1000DPS << 3;
break;
case 2000:
data = INV_FSR_2000DPS << 3;
break;
default:
return -1;
}
if (st.chip_cfg.gyro_fsr == (data >> 3))
return 0;
if (i2c_write(st.hw->addr, st.reg->gyro_cfg, 1, &data))
return -1;
st.chip_cfg.gyro_fsr = data >> 3;
return 0;
}
/**
* @brief Get the accel full-scale range.
* @param[out] fsr Current full-scale range.
* @return 0 if successful.
*/
int mpu_get_accel_fsr(unsigned char *fsr)
{
switch (st.chip_cfg.accel_fsr) {
case INV_FSR_2G:
fsr[0] = 2;
break;
case INV_FSR_4G:
fsr[0] = 4;
break;
case INV_FSR_8G:
fsr[0] = 8;
break;
case INV_FSR_16G:
fsr[0] = 16;
break;
default:
return -1;
}
if (st.chip_cfg.accel_half)
fsr[0] <<= 1;
return 0;
}
/**
* @brief Set the accel full-scale range.
* @param[in] fsr Desired full-scale range.
* @return 0 if successful.
*/
int mpu_set_accel_fsr(unsigned char fsr)
{
unsigned char data;
if (!(st.chip_cfg.sensors))
return -1;
switch (fsr) {
case 2:
data = INV_FSR_2G << 3;
break;
case 4:
data = INV_FSR_4G << 3;
break;
case 8:
data = INV_FSR_8G << 3;
break;
case 16:
data = INV_FSR_16G << 3;
break;
default:
return -1;
}
if (st.chip_cfg.accel_fsr == (data >> 3))
return 0;
if (i2c_write(st.hw->addr, st.reg->accel_cfg, 1, &data))
return -1;
st.chip_cfg.accel_fsr = data >> 3;
return 0;
}
/**
* @brief Get the current DLPF setting.
* @param[out] lpf Current LPF setting.
* 0 if successful.
*/
int mpu_get_lpf(unsigned short *lpf)
{
switch (st.chip_cfg.lpf) {
case INV_FILTER_188HZ:
lpf[0] = 188;
break;
case INV_FILTER_98HZ:
lpf[0] = 98;
break;
case INV_FILTER_42HZ:
lpf[0] = 42;
break;
case INV_FILTER_20HZ:
lpf[0] = 20;
break;
case INV_FILTER_10HZ:
lpf[0] = 10;
break;
case INV_FILTER_5HZ:
lpf[0] = 5;
break;
case INV_FILTER_256HZ_NOLPF2:
case INV_FILTER_2100HZ_NOLPF:
default:
lpf[0] = 0;
break;
}
return 0;
}
/**
* @brief Set digital low pass filter.
* The following LPF settings are supported: 188, 98, 42, 20, 10, 5.
* @param[in] lpf Desired LPF setting.
* @return 0 if successful.
*/
int mpu_set_lpf(unsigned short lpf)
{
unsigned char data;
if (!(st.chip_cfg.sensors))
return -1;
if (lpf >= 188)
data = INV_FILTER_188HZ;
else if (lpf >= 98)
data = INV_FILTER_98HZ;
else if (lpf >= 42)
data = INV_FILTER_42HZ;
else if (lpf >= 20)
data = INV_FILTER_20HZ;
else if (lpf >= 10)
data = INV_FILTER_10HZ;
else
data = INV_FILTER_5HZ;
if (st.chip_cfg.lpf == data)
return 0;
if (i2c_write(st.hw->addr, st.reg->lpf, 1, &data))
return -1;
st.chip_cfg.lpf = data;
return 0;
}
/**
* @brief Get sampling rate.
* @param[out] rate Current sampling rate (Hz).
* @return 0 if successful.
*/
int mpu_get_sample_rate(unsigned short *rate)
{
if (st.chip_cfg.dmp_on)
return -1;
else
rate[0] = st.chip_cfg.sample_rate;
return 0;
}
/**
* @brief Set sampling rate.
* Sampling rate must be between 4Hz and 1kHz.
* @param[in] rate Desired sampling rate (Hz).
* @return 0 if successful.
*/
int mpu_set_sample_rate(unsigned short rate)
{
unsigned char data;
if (!(st.chip_cfg.sensors))
return -1;
if (st.chip_cfg.dmp_on)
return -1;
else {
if (st.chip_cfg.lp_accel_mode) {
if (rate && (rate <= 40)) {
/* Just stay in low-power accel mode. */
mpu_lp_accel_mode(rate);
return 0;
}
/* Requested rate exceeds the allowed frequencies in LP accel mode,
* switch back to full-power mode.
*/
mpu_lp_accel_mode(0);
}
if (rate < 4)
rate = 4;
else if (rate > 1000)
rate = 1000;
data = 1000 / rate - 1;
if (i2c_write(st.hw->addr, st.reg->rate_div, 1, &data))
return -1;
st.chip_cfg.sample_rate = 1000 / (1 + data);
#ifdef AK89xx_SECONDARY
mpu_set_compass_sample_rate(min(st.chip_cfg.compass_sample_rate, MAX_COMPASS_SAMPLE_RATE));
#endif
/* Automatically set LPF to 1/2 sampling rate. */
mpu_set_lpf(st.chip_cfg.sample_rate >> 1);
return 0;
}
}
/**
* @brief Get compass sampling rate.
* @param[out] rate Current compass sampling rate (Hz).
* @return 0 if successful.
*/
int mpu_get_compass_sample_rate(unsigned short *rate)
{
#ifdef AK89xx_SECONDARY
rate[0] = st.chip_cfg.compass_sample_rate;
return 0;
#else
rate[0] = 0;
return -1;
#endif
}
/**
* @brief Set compass sampling rate.
* The compass on the auxiliary I2C bus is read by the MPU hardware at a
* maximum of 100Hz. The actual rate can be set to a fraction of the gyro
* sampling rate.
*
* \n WARNING: The new rate may be different than what was requested. Call
* mpu_get_compass_sample_rate to check the actual setting.
* @param[in] rate Desired compass sampling rate (Hz).
* @return 0 if successful.
*/
int mpu_set_compass_sample_rate(unsigned short rate)
{
#ifdef AK89xx_SECONDARY
unsigned char div;
if (!rate || rate > st.chip_cfg.sample_rate || rate > MAX_COMPASS_SAMPLE_RATE)
return -1;
div = st.chip_cfg.sample_rate / rate - 1;
if (i2c_write(st.hw->addr, st.reg->s4_ctrl, 1, &div))
return -1;
st.chip_cfg.compass_sample_rate = st.chip_cfg.sample_rate / (div + 1);
return 0;
#else
return -1;
#endif
}
/**
* @brief Get gyro sensitivity scale factor.
* @param[out] sens Conversion from hardware units to dps.
* @return 0 if successful.
*/
int mpu_get_gyro_sens(float *sens)
{
switch (st.chip_cfg.gyro_fsr) {
case INV_FSR_250DPS:
sens[0] = 131.f;
break;
case INV_FSR_500DPS:
sens[0] = 65.5f;
break;
case INV_FSR_1000DPS:
sens[0] = 32.8f;
break;
case INV_FSR_2000DPS:
sens[0] = 16.4f;
break;
default:
return -1;
}
return 0;
}
/**
* @brief Get accel sensitivity scale factor.
* @param[out] sens Conversion from hardware units to g's.
* @return 0 if successful.
*/
int mpu_get_accel_sens(unsigned short *sens)
{
switch (st.chip_cfg.accel_fsr) {
case INV_FSR_2G:
sens[0] = 16384;
break;
case INV_FSR_4G:
sens[0] = 8092;
break;
case INV_FSR_8G:
sens[0] = 4096;
break;
case INV_FSR_16G:
sens[0] = 2048;
break;
default:
return -1;
}
if (st.chip_cfg.accel_half)
sens[0] >>= 1;
return 0;
}
/**
* @brief Get current FIFO configuration.
* @e sensors can contain a combination of the following flags:
* \n INV_X_GYRO, INV_Y_GYRO, INV_Z_GYRO
* \n INV_XYZ_GYRO
* \n INV_XYZ_ACCEL
* @param[out] sensors Mask of sensors in FIFO.
* @return 0 if successful.
*/
int mpu_get_fifo_config(unsigned char *sensors)
{
sensors[0] = st.chip_cfg.fifo_enable;
return 0;
}
/**
* @brief Select which sensors are pushed to FIFO.
* @e sensors can contain a combination of the following flags:
* \n INV_X_GYRO, INV_Y_GYRO, INV_Z_GYRO
* \n INV_XYZ_GYRO
* \n INV_XYZ_ACCEL
* @param[in] sensors Mask of sensors to push to FIFO.
* @return 0 if successful.
*/
int mpu_configure_fifo(unsigned char sensors)
{
unsigned char prev;
int result = 0;
/* Compass data isn't going into the FIFO. Stop trying. */
sensors &= ~INV_XYZ_COMPASS;
if (st.chip_cfg.dmp_on)
return 0;
else {
if (!(st.chip_cfg.sensors))
return -1;
prev = st.chip_cfg.fifo_enable;
st.chip_cfg.fifo_enable = sensors & st.chip_cfg.sensors;
if (st.chip_cfg.fifo_enable != sensors)
/* You're not getting what you asked for. Some sensors are
* asleep.
*/
result = -1;
else
result = 0;
if (sensors || st.chip_cfg.lp_accel_mode)
set_int_enable(1);
else
set_int_enable(0);
if (sensors) {
if (mpu_reset_fifo()) {
st.chip_cfg.fifo_enable = prev;
return -1;
}
}
}
return result;
}
/**
* @brief Get current power state.
* @param[in] power_on 1 if turned on, 0 if suspended.
* @return 0 if successful.
*/
int mpu_get_power_state(unsigned char *power_on)
{
if (st.chip_cfg.sensors)
power_on[0] = 1;
else
power_on[0] = 0;
return 0;
}
/**
* @brief Turn specific sensors on/off.
* @e sensors can contain a combination of the following flags:
* \n INV_X_GYRO, INV_Y_GYRO, INV_Z_GYRO
* \n INV_XYZ_GYRO
* \n INV_XYZ_ACCEL
* \n INV_XYZ_COMPASS
* @param[in] sensors Mask of sensors to wake.
* @return 0 if successful.
*/
int mpu_set_sensors(unsigned char sensors)
{
unsigned char data;
#ifdef AK89xx_SECONDARY
unsigned char user_ctrl;
#endif
if (sensors & INV_XYZ_GYRO)
data = INV_CLK_PLL;
else if (sensors)
data = 0;
else
data = BIT_SLEEP;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, &data)) {
st.chip_cfg.sensors = 0;
return -1;
}
st.chip_cfg.clk_src = data & ~BIT_SLEEP;
data = 0;
if (!(sensors & INV_X_GYRO))
data |= BIT_STBY_XG;
if (!(sensors & INV_Y_GYRO))
data |= BIT_STBY_YG;
if (!(sensors & INV_Z_GYRO))
data |= BIT_STBY_ZG;
if (!(sensors & INV_XYZ_ACCEL))
data |= BIT_STBY_XYZA;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_2, 1, &data)) {
st.chip_cfg.sensors = 0;
return -1;
}
if (sensors && (sensors != INV_XYZ_ACCEL))
/* Latched interrupts only used in LP accel mode. */
mpu_set_int_latched(0);
#ifdef AK89xx_SECONDARY
#ifdef AK89xx_BYPASS
if (sensors & INV_XYZ_COMPASS)
mpu_set_bypass(1);
else
mpu_set_bypass(0);
#else
if (i2c_read(st.hw->addr, st.reg->user_ctrl, 1, &user_ctrl))
return -1;
/* Handle AKM power management. */
if (sensors & INV_XYZ_COMPASS) {
data = AKM_SINGLE_MEASUREMENT;
user_ctrl |= BIT_AUX_IF_EN;
} else {
data = AKM_POWER_DOWN;
user_ctrl &= ~BIT_AUX_IF_EN;
}
if (st.chip_cfg.dmp_on)
user_ctrl |= BIT_DMP_EN;
else
user_ctrl &= ~BIT_DMP_EN;
if (i2c_write(st.hw->addr, st.reg->s1_do, 1, &data))
return -1;
/* Enable/disable I2C master mode. */
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &user_ctrl))
return -1;
#endif
#endif
st.chip_cfg.sensors = sensors;
st.chip_cfg.lp_accel_mode = 0;
delay_ms(50);
return 0;
}
/**
* @brief Read the MPU interrupt status registers.
* @param[out] status Mask of interrupt bits.
* @return 0 if successful.
*/
int mpu_get_int_status(short *status)
{
unsigned char tmp[2];
if (!st.chip_cfg.sensors)
return -1;
if (i2c_read(st.hw->addr, st.reg->dmp_int_status, 2, tmp))
return -1;
status[0] = (tmp[0] << 8) | tmp[1];
return 0;
}
/**
* @brief Get one packet from the FIFO.
* If @e sensors does not contain a particular sensor, disregard the data
* returned to that pointer.
* \n @e sensors can contain a combination of the following flags:
* \n INV_X_GYRO, INV_Y_GYRO, INV_Z_GYRO
* \n INV_XYZ_GYRO
* \n INV_XYZ_ACCEL
* \n If the FIFO has no new data, @e sensors will be zero.
* \n If the FIFO is disabled, @e sensors will be zero and this function will
* return a non-zero error code.
* @param[out] gyro Gyro data in hardware units.
* @param[out] accel Accel data in hardware units.
* @param[out] timestamp Timestamp in milliseconds.
* @param[out] sensors Mask of sensors read from FIFO.
* @param[out] more Number of remaining packets.
* @return 0 if successful.
*/
int mpu_read_fifo(short *gyro, short *accel, unsigned long *timestamp,
unsigned char *sensors, unsigned char *more)
{
/* Assumes maximum packet size is gyro (6) + accel (6). */
unsigned char data[MAX_PACKET_LENGTH];
unsigned char packet_size = 0;
unsigned short fifo_count, index = 0;
if (st.chip_cfg.dmp_on)
return -1;
sensors[0] = 0;
if (!st.chip_cfg.sensors)
return -1;
if (!st.chip_cfg.fifo_enable)
return -1;
if (st.chip_cfg.fifo_enable & INV_X_GYRO)
packet_size += 2;
if (st.chip_cfg.fifo_enable & INV_Y_GYRO)
packet_size += 2;
if (st.chip_cfg.fifo_enable & INV_Z_GYRO)
packet_size += 2;
if (st.chip_cfg.fifo_enable & INV_XYZ_ACCEL)
packet_size += 6;
if (i2c_read(st.hw->addr, st.reg->fifo_count_h, 2, data))
return -1;
fifo_count = (data[0] << 8) | data[1];
if (fifo_count < packet_size)
return 0;
// log_i("FIFO count: %hd\n", fifo_count);
if (fifo_count > (st.hw->max_fifo >> 1)) {
/* FIFO is 50% full, better check overflow bit. */
if (i2c_read(st.hw->addr, st.reg->int_status, 1, data))
return -1;
if (data[0] & BIT_FIFO_OVERFLOW) {
mpu_reset_fifo();
return -2;
}
}
get_ms((unsigned long*)timestamp);
if (i2c_read(st.hw->addr, st.reg->fifo_r_w, packet_size, data))
return -1;
more[0] = fifo_count / packet_size - 1;
sensors[0] = 0;
if ((index != packet_size) && st.chip_cfg.fifo_enable & INV_XYZ_ACCEL) {
accel[0] = (data[index+0] << 8) | data[index+1];
accel[1] = (data[index+2] << 8) | data[index+3];
accel[2] = (data[index+4] << 8) | data[index+5];
sensors[0] |= INV_XYZ_ACCEL;
index += 6;
}
if ((index != packet_size) && st.chip_cfg.fifo_enable & INV_X_GYRO) {
gyro[0] = (data[index+0] << 8) | data[index+1];
sensors[0] |= INV_X_GYRO;
index += 2;
}
if ((index != packet_size) && st.chip_cfg.fifo_enable & INV_Y_GYRO) {
gyro[1] = (data[index+0] << 8) | data[index+1];
sensors[0] |= INV_Y_GYRO;
index += 2;
}
if ((index != packet_size) && st.chip_cfg.fifo_enable & INV_Z_GYRO) {
gyro[2] = (data[index+0] << 8) | data[index+1];
sensors[0] |= INV_Z_GYRO;
index += 2;
}
return 0;
}
/**
* @brief Get one unparsed packet from the FIFO.
* This function should be used if the packet is to be parsed elsewhere.
* @param[in] length Length of one FIFO packet.
* @param[in] data FIFO packet.
* @param[in] more Number of remaining packets.
*/
int mpu_read_fifo_stream(unsigned short length, unsigned char *data,
unsigned char *more)
{
unsigned char tmp[2];
unsigned short fifo_count;
if (!st.chip_cfg.dmp_on)
return -1;
if (!st.chip_cfg.sensors)
return -1;
if (i2c_read(st.hw->addr, st.reg->fifo_count_h, 2, tmp))
return -1;
fifo_count = (tmp[0] << 8) | tmp[1];
if (fifo_count < length) {
more[0] = 0;
return -1;
}
if (fifo_count > (st.hw->max_fifo >> 1)) {
/* FIFO is 50% full, better check overflow bit. */
if (i2c_read(st.hw->addr, st.reg->int_status, 1, tmp))
return -1;
if (tmp[0] & BIT_FIFO_OVERFLOW) {
mpu_reset_fifo();
return -2;
}
}
if (i2c_read(st.hw->addr, st.reg->fifo_r_w, length, data))
return -1;
more[0] = fifo_count / length - 1;
return 0;
}
/**
* @brief Set device to bypass mode.
* @param[in] bypass_on 1 to enable bypass mode.
* @return 0 if successful.
*/
int mpu_set_bypass(unsigned char bypass_on)
{
unsigned char tmp;
if (st.chip_cfg.bypass_mode == bypass_on)
return 0;
if (bypass_on) {
if (i2c_read(st.hw->addr, st.reg->user_ctrl, 1, &tmp))
return -1;
tmp &= ~BIT_AUX_IF_EN;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &tmp))
return -1;
delay_ms(3);
tmp = BIT_BYPASS_EN;
if (st.chip_cfg.active_low_int)
tmp |= BIT_ACTL;
if (st.chip_cfg.latched_int)
tmp |= BIT_LATCH_EN | BIT_ANY_RD_CLR;
if (i2c_write(st.hw->addr, st.reg->int_pin_cfg, 1, &tmp))
return -1;
} else {
/* Enable I2C master mode if compass is being used. */
if (i2c_read(st.hw->addr, st.reg->user_ctrl, 1, &tmp))
return -1;
if (st.chip_cfg.sensors & INV_XYZ_COMPASS)
tmp |= BIT_AUX_IF_EN;
else
tmp &= ~BIT_AUX_IF_EN;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, &tmp))
return -1;
delay_ms(3);
if (st.chip_cfg.active_low_int)
tmp = BIT_ACTL;
else
tmp = 0;
if (st.chip_cfg.latched_int)
tmp |= BIT_LATCH_EN | BIT_ANY_RD_CLR;
if (i2c_write(st.hw->addr, st.reg->int_pin_cfg, 1, &tmp))
return -1;
}
st.chip_cfg.bypass_mode = bypass_on;
return 0;
}
/**
* @brief Set interrupt level.
* @param[in] active_low 1 for active low, 0 for active high.
* @return 0 if successful.
*/
int mpu_set_int_level(unsigned char active_low)
{
st.chip_cfg.active_low_int = active_low;
return 0;
}
/**
* @brief Enable latched interrupts.
* Any MPU register will clear the interrupt.
* @param[in] enable 1 to enable, 0 to disable.
* @return 0 if successful.
*/
int mpu_set_int_latched(unsigned char enable)
{
unsigned char tmp;
if (st.chip_cfg.latched_int == enable)
return 0;
if (enable)
tmp = BIT_LATCH_EN | BIT_ANY_RD_CLR;
else
tmp = 0;
if (st.chip_cfg.bypass_mode)
tmp |= BIT_BYPASS_EN;
if (st.chip_cfg.active_low_int)
tmp |= BIT_ACTL;
if (i2c_write(st.hw->addr, st.reg->int_pin_cfg, 1, &tmp))
return -1;
st.chip_cfg.latched_int = enable;
return 0;
}
#ifdef MPU6050
static int get_accel_prod_shift(float *st_shift)
{
unsigned char tmp[4], shift_code[3], ii;
if (i2c_read(st.hw->addr, 0x0D, 4, tmp))
return 0x07;
shift_code[0] = ((tmp[0] & 0xE0) >> 3) | ((tmp[3] & 0x30) >> 4);
shift_code[1] = ((tmp[1] & 0xE0) >> 3) | ((tmp[3] & 0x0C) >> 2);
shift_code[2] = ((tmp[2] & 0xE0) >> 3) | (tmp[3] & 0x03);
for (ii = 0; ii < 3; ii++) {
if (!shift_code[ii]) {
st_shift[ii] = 0.f;
continue;
}
/* Equivalent to..
* st_shift[ii] = 0.34f * powf(0.92f/0.34f, (shift_code[ii]-1) / 30.f)
*/
st_shift[ii] = 0.34f;
while (--shift_code[ii])
st_shift[ii] *= 1.034f;
}
return 0;
}
static int accel_self_test(long *bias_regular, long *bias_st)
{
int jj, result = 0;
float st_shift[3], st_shift_cust, st_shift_var;
get_accel_prod_shift(st_shift);
for(jj = 0; jj < 3; jj++) {
st_shift_cust = labs(bias_regular[jj] - bias_st[jj]) / 65536.f;
if (st_shift[jj]) {
st_shift_var = st_shift_cust / st_shift[jj] - 1.f;
if (fabs(st_shift_var) > test.max_accel_var)
result |= 1 << jj;
} else if ((st_shift_cust < test.min_g) ||
(st_shift_cust > test.max_g))
result |= 1 << jj;
}
return result;
}
static int gyro_self_test(long *bias_regular, long *bias_st)
{
int jj, result = 0;
unsigned char tmp[3];
float st_shift, st_shift_cust, st_shift_var;
if (i2c_read(st.hw->addr, 0x0D, 3, tmp))
return 0x07;
tmp[0] &= 0x1F;
tmp[1] &= 0x1F;
tmp[2] &= 0x1F;
for (jj = 0; jj < 3; jj++) {
st_shift_cust = labs(bias_regular[jj] - bias_st[jj]) / 65536.f;
if (tmp[jj]) {
st_shift = 3275.f / test.gyro_sens;
while (--tmp[jj])
st_shift *= 1.046f;
st_shift_var = st_shift_cust / st_shift - 1.f;
if (fabs(st_shift_var) > test.max_gyro_var)
result |= 1 << jj;
} else if ((st_shift_cust < test.min_dps) ||
(st_shift_cust > test.max_dps))
result |= 1 << jj;
}
return result;
}
#ifdef AK89xx_SECONDARY
static int compass_self_test(void)
{
unsigned char tmp[6];
unsigned char tries = 10;
int result = 0x07;
short data;
mpu_set_bypass(1);
tmp[0] = AKM_POWER_DOWN;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, tmp))
return 0x07;
tmp[0] = AKM_BIT_SELF_TEST;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_ASTC, 1, tmp))
goto AKM_restore;
tmp[0] = AKM_MODE_SELF_TEST;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, tmp))
goto AKM_restore;
do {
delay_ms(10);
if (i2c_read(st.chip_cfg.compass_addr, AKM_REG_ST1, 1, tmp))
goto AKM_restore;
if (tmp[0] & AKM_DATA_READY)
break;
} while (tries--);
if (!(tmp[0] & AKM_DATA_READY))
goto AKM_restore;
if (i2c_read(st.chip_cfg.compass_addr, AKM_REG_HXL, 6, tmp))
goto AKM_restore;
result = 0;
data = (short)(tmp[1] << 8) | tmp[0];
if ((data > 100) || (data < -100))
result |= 0x01;
data = (short)(tmp[3] << 8) | tmp[2];
if ((data > 100) || (data < -100))
result |= 0x02;
data = (short)(tmp[5] << 8) | tmp[4];
if ((data > -300) || (data < -1000))
result |= 0x04;
AKM_restore:
tmp[0] = 0 | SUPPORTS_AK89xx_HIGH_SENS;
i2c_write(st.chip_cfg.compass_addr, AKM_REG_ASTC, 1, tmp);
tmp[0] = SUPPORTS_AK89xx_HIGH_SENS;
i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, tmp);
mpu_set_bypass(0);
return result;
}
#endif
#endif
static int get_st_biases(long *gyro, long *accel, unsigned char hw_test)
{
unsigned char data[MAX_PACKET_LENGTH];
unsigned char packet_count, ii;
unsigned short fifo_count;
data[0] = 0x01;
data[1] = 0;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 2, data))
return -1;
delay_ms(200);
data[0] = 0;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, data))
return -1;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, data))
return -1;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, data))
return -1;
if (i2c_write(st.hw->addr, st.reg->i2c_mst, 1, data))
return -1;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, data))
return -1;
data[0] = BIT_FIFO_RST | BIT_DMP_RST;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, data))
return -1;
delay_ms(15);
data[0] = st.test->reg_lpf;
if (i2c_write(st.hw->addr, st.reg->lpf, 1, data))
return -1;
data[0] = st.test->reg_rate_div;
if (i2c_write(st.hw->addr, st.reg->rate_div, 1, data))
return -1;
if (hw_test)
data[0] = st.test->reg_gyro_fsr | 0xE0;
else
data[0] = st.test->reg_gyro_fsr;
if (i2c_write(st.hw->addr, st.reg->gyro_cfg, 1, data))
return -1;
if (hw_test)
data[0] = st.test->reg_accel_fsr | 0xE0;
else
data[0] = test.reg_accel_fsr;
if (i2c_write(st.hw->addr, st.reg->accel_cfg, 1, data))
return -1;
if (hw_test)
delay_ms(200);
/* Fill FIFO for test.wait_ms milliseconds. */
data[0] = BIT_FIFO_EN;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 1, data))
return -1;
data[0] = INV_XYZ_GYRO | INV_XYZ_ACCEL;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, data))
return -1;
delay_ms(test.wait_ms);
data[0] = 0;
if (i2c_write(st.hw->addr, st.reg->fifo_en, 1, data))
return -1;
if (i2c_read(st.hw->addr, st.reg->fifo_count_h, 2, data))
return -1;
fifo_count = (data[0] << 8) | data[1];
packet_count = fifo_count / MAX_PACKET_LENGTH;
gyro[0] = gyro[1] = gyro[2] = 0;
accel[0] = accel[1] = accel[2] = 0;
for (ii = 0; ii < packet_count; ii++) {
short accel_cur[3], gyro_cur[3];
if (i2c_read(st.hw->addr, st.reg->fifo_r_w, MAX_PACKET_LENGTH, data))
return -1;
accel_cur[0] = ((short)data[0] << 8) | data[1];
accel_cur[1] = ((short)data[2] << 8) | data[3];
accel_cur[2] = ((short)data[4] << 8) | data[5];
accel[0] += (long)accel_cur[0];
accel[1] += (long)accel_cur[1];
accel[2] += (long)accel_cur[2];
gyro_cur[0] = (((short)data[6] << 8) | data[7]);
gyro_cur[1] = (((short)data[8] << 8) | data[9]);
gyro_cur[2] = (((short)data[10] << 8) | data[11]);
gyro[0] += (long)gyro_cur[0];
gyro[1] += (long)gyro_cur[1];
gyro[2] += (long)gyro_cur[2];
}
#ifdef EMPL_NO_64BIT
gyro[0] = (long)(((float)gyro[0]*65536.f) / test.gyro_sens / packet_count);
gyro[1] = (long)(((float)gyro[1]*65536.f) / test.gyro_sens / packet_count);
gyro[2] = (long)(((float)gyro[2]*65536.f) / test.gyro_sens / packet_count);
if (has_accel) {
accel[0] = (long)(((float)accel[0]*65536.f) / test.accel_sens /
packet_count);
accel[1] = (long)(((float)accel[1]*65536.f) / test.accel_sens /
packet_count);
accel[2] = (long)(((float)accel[2]*65536.f) / test.accel_sens /
packet_count);
/* Don't remove gravity! */
accel[2] -= 65536L;
}
#else
gyro[0] = (long)(((long long)gyro[0]<<16) / test.gyro_sens / packet_count);
gyro[1] = (long)(((long long)gyro[1]<<16) / test.gyro_sens / packet_count);
gyro[2] = (long)(((long long)gyro[2]<<16) / test.gyro_sens / packet_count);
accel[0] = (long)(((long long)accel[0]<<16) / test.accel_sens /
packet_count);
accel[1] = (long)(((long long)accel[1]<<16) / test.accel_sens /
packet_count);
accel[2] = (long)(((long long)accel[2]<<16) / test.accel_sens /
packet_count);
/* Don't remove gravity! */
if (accel[2] > 0L)
accel[2] -= 65536L;
else
accel[2] += 65536L;
#endif
return 0;
}
/**
* @brief Trigger gyro/accel/compass self-test.
* On success/error, the self-test returns a mask representing the sensor(s)
* that failed. For each bit, a one (1) represents a "pass" case; conversely,
* a zero (0) indicates a failure.
*
* \n The mask is defined as follows:
* \n Bit 0: Gyro.
* \n Bit 1: Accel.
* \n Bit 2: Compass.
*
* \n Currently, the hardware self-test is unsupported for MPU6500. However,
* this function can still be used to obtain the accel and gyro biases.
*
* \n This function must be called with the device either face-up or face-down
* (z-axis is parallel to gravity).
* @param[out] gyro Gyro biases in q16 format.
* @param[out] accel Accel biases (if applicable) in q16 format.
* @return Result mask (see above).
*/
int mpu_run_self_test(long *gyro, long *accel)
{
#ifdef MPU6050
const unsigned char tries = 2;
long gyro_st[3], accel_st[3];
unsigned char accel_result, gyro_result;
#ifdef AK89xx_SECONDARY
unsigned char compass_result;
#endif
int ii;
#endif
int result;
unsigned char accel_fsr, fifo_sensors, sensors_on;
unsigned short gyro_fsr, sample_rate, lpf;
unsigned char dmp_was_on;
if (st.chip_cfg.dmp_on) {
mpu_set_dmp_state(0);
dmp_was_on = 1;
} else
dmp_was_on = 0;
/* Get initial settings. */
mpu_get_gyro_fsr(&gyro_fsr);
mpu_get_accel_fsr(&accel_fsr);
mpu_get_lpf(&lpf);
mpu_get_sample_rate(&sample_rate);
sensors_on = st.chip_cfg.sensors;
mpu_get_fifo_config(&fifo_sensors);
/* For older chips, the self-test will be different. */
#if defined MPU6050
for (ii = 0; ii < tries; ii++)
if (!get_st_biases(gyro, accel, 0))
break;
if (ii == tries) {
/* If we reach this point, we most likely encountered an I2C error.
* We'll just report an error for all three sensors.
*/
result = 0;
goto restore;
}
for (ii = 0; ii < tries; ii++)
if (!get_st_biases(gyro_st, accel_st, 1))
break;
if (ii == tries) {
/* Again, probably an I2C error. */
result = 0;
goto restore;
}
accel_result = accel_self_test(accel, accel_st);
gyro_result = gyro_self_test(gyro, gyro_st);
result = 0;
if (!gyro_result)
result |= 0x01;
if (!accel_result)
result |= 0x02;
#ifdef AK89xx_SECONDARY
compass_result = compass_self_test();
if (!compass_result)
result |= 0x04;
#endif
restore:
#elif defined MPU6500
/* For now, this function will return a "pass" result for all three sensors
* for compatibility with current test applications.
*/
get_st_biases(gyro, accel, 0);
result = 0x7;
#endif
/* Set to invalid values to ensure no I2C writes are skipped. */
st.chip_cfg.gyro_fsr = 0xFF;
st.chip_cfg.accel_fsr = 0xFF;
st.chip_cfg.lpf = 0xFF;
st.chip_cfg.sample_rate = 0xFFFF;
st.chip_cfg.sensors = 0xFF;
st.chip_cfg.fifo_enable = 0xFF;
st.chip_cfg.clk_src = INV_CLK_PLL;
mpu_set_gyro_fsr(gyro_fsr);
mpu_set_accel_fsr(accel_fsr);
mpu_set_lpf(lpf);
mpu_set_sample_rate(sample_rate);
mpu_set_sensors(sensors_on);
mpu_configure_fifo(fifo_sensors);
if (dmp_was_on)
mpu_set_dmp_state(1);
return result;
}
/**
* @brief Write to the DMP memory.
* This function prevents I2C writes past the bank boundaries. The DMP memory
* is only accessible when the chip is awake.
* @param[in] mem_addr Memory location (bank << 8 | start address)
* @param[in] length Number of bytes to write.
* @param[in] data Bytes to write to memory.
* @return 0 if successful.
*/
int mpu_write_mem(unsigned short mem_addr, unsigned short length,
unsigned char *data)
{
unsigned char tmp[2];
if (!data)
return -1;
if (!st.chip_cfg.sensors)
return -1;
tmp[0] = (unsigned char)(mem_addr >> 8);
tmp[1] = (unsigned char)(mem_addr & 0xFF);
/* Check bank boundaries. */
if (tmp[1] + length > st.hw->bank_size)
return -1;
if (i2c_write(st.hw->addr, st.reg->bank_sel, 2, tmp))
return -1;
if (i2c_write(st.hw->addr, st.reg->mem_r_w, length, data))
return -1;
return 0;
}
/**
* @brief Read from the DMP memory.
* This function prevents I2C reads past the bank boundaries. The DMP memory
* is only accessible when the chip is awake.
* @param[in] mem_addr Memory location (bank << 8 | start address)
* @param[in] length Number of bytes to read.
* @param[out] data Bytes read from memory.
* @return 0 if successful.
*/
int mpu_read_mem(unsigned short mem_addr, unsigned short length,
unsigned char *data)
{
unsigned char tmp[2];
if (!data)
return -1;
if (!st.chip_cfg.sensors)
return -1;
tmp[0] = (unsigned char)(mem_addr >> 8);
tmp[1] = (unsigned char)(mem_addr & 0xFF);
/* Check bank boundaries. */
if (tmp[1] + length > st.hw->bank_size)
return -1;
if (i2c_write(st.hw->addr, st.reg->bank_sel, 2, tmp))
return -1;
if (i2c_read(st.hw->addr, st.reg->mem_r_w, length, data))
return -1;
return 0;
}
/**
* @brief Load and verify DMP image.
* @param[in] length Length of DMP image.
* @param[in] firmware DMP code.
* @param[in] start_addr Starting address of DMP code memory.
* @param[in] sample_rate Fixed sampling rate used when DMP is enabled.
* @return 0 if successful.
*/
int mpu_load_firmware(unsigned short length, const unsigned char *firmware,
unsigned short start_addr, unsigned short sample_rate)
{
unsigned short ii;
unsigned short this_write;
/* Must divide evenly into st.hw->bank_size to avoid bank crossings. */
#define LOAD_CHUNK (16)
unsigned char cur[LOAD_CHUNK], tmp[2];
if (st.chip_cfg.dmp_loaded)
/* DMP should only be loaded once. */
return -1;
if (!firmware)
return -1;
for (ii = 0; ii < length; ii += this_write) {
this_write = min(LOAD_CHUNK, length - ii);
if (mpu_write_mem(ii, this_write, (unsigned char*)&firmware[ii]))
return -1;
if (mpu_read_mem(ii, this_write, cur))
return -1;
if (memcmp(firmware+ii, cur, this_write))
return -2;
}
/* Set program start address. */
tmp[0] = start_addr >> 8;
tmp[1] = start_addr & 0xFF;
if (i2c_write(st.hw->addr, st.reg->prgm_start_h, 2, tmp))
return -1;
st.chip_cfg.dmp_loaded = 1;
st.chip_cfg.dmp_sample_rate = sample_rate;
return 0;
}
/**
* @brief Enable/disable DMP support.
* @param[in] enable 1 to turn on the DMP.
* @return 0 if successful.
*/
int mpu_set_dmp_state(unsigned char enable)
{
unsigned char tmp;
if (st.chip_cfg.dmp_on == enable)
return 0;
if (enable) {
if (!st.chip_cfg.dmp_loaded)
return -1;
/* Disable data ready interrupt. */
set_int_enable(0);
/* Disable bypass mode. */
mpu_set_bypass(0);
/* Keep constant sample rate, FIFO rate controlled by DMP. */
mpu_set_sample_rate(st.chip_cfg.dmp_sample_rate);
/* Remove FIFO elements. */
tmp = 0;
i2c_write(st.hw->addr, 0x23, 1, &tmp);
st.chip_cfg.dmp_on = 1;
/* Enable DMP interrupt. */
set_int_enable(1);
mpu_reset_fifo();
} else {
/* Disable DMP interrupt. */
set_int_enable(0);
/* Restore FIFO settings. */
tmp = st.chip_cfg.fifo_enable;
i2c_write(st.hw->addr, 0x23, 1, &tmp);
st.chip_cfg.dmp_on = 0;
mpu_reset_fifo();
}
return 0;
}
/**
* @brief Get DMP state.
* @param[out] enabled 1 if enabled.
* @return 0 if successful.
*/
int mpu_get_dmp_state(unsigned char *enabled)
{
enabled[0] = st.chip_cfg.dmp_on;
return 0;
}
/* This initialization is similar to the one in ak8975.c. */
int setup_compass(void)
{
#ifdef AK89xx_SECONDARY
unsigned char data[4], akm_addr;
mpu_set_bypass(1);
/* Find compass. Possible addresses range from 0x0C to 0x0F. */
for (akm_addr = 0x0C; akm_addr <= 0x0F; akm_addr++) {
int result;
result = i2c_read(akm_addr, AKM_REG_WHOAMI, 1, data);
if (!result && (data[0] == AKM_WHOAMI))
break;
}
if (akm_addr > 0x0F) {
/* TODO: Handle this case in all compass-related functions. */
log_e("Compass not found.\n");
return -1;
}
st.chip_cfg.compass_addr = akm_addr;
data[0] = AKM_POWER_DOWN;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, data))
return -1;
delay_ms(1);
data[0] = AKM_FUSE_ROM_ACCESS;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, data))
return -1;
delay_ms(1);
/* Get sensitivity adjustment data from fuse ROM. */
if (i2c_read(st.chip_cfg.compass_addr, AKM_REG_ASAX, 3, data))
return -1;
st.chip_cfg.mag_sens_adj[0] = (long)data[0] + 128;
st.chip_cfg.mag_sens_adj[1] = (long)data[1] + 128;
st.chip_cfg.mag_sens_adj[2] = (long)data[2] + 128;
data[0] = AKM_POWER_DOWN;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, data))
return -1;
delay_ms(1);
mpu_set_bypass(0);
/* Set up master mode, master clock, and ES bit. */
data[0] = 0x40;
if (i2c_write(st.hw->addr, st.reg->i2c_mst, 1, data))
return -1;
/* Slave 0 reads from AKM data registers. */
data[0] = BIT_I2C_READ | st.chip_cfg.compass_addr;
if (i2c_write(st.hw->addr, st.reg->s0_addr, 1, data))
return -1;
/* Compass reads start at this register. */
data[0] = AKM_REG_ST1;
if (i2c_write(st.hw->addr, st.reg->s0_reg, 1, data))
return -1;
/* Enable slave 0, 8-byte reads. */
data[0] = BIT_SLAVE_EN | 8;
if (i2c_write(st.hw->addr, st.reg->s0_ctrl, 1, data))
return -1;
/* Slave 1 changes AKM measurement mode. */
data[0] = st.chip_cfg.compass_addr;
if (i2c_write(st.hw->addr, st.reg->s1_addr, 1, data))
return -1;
/* AKM measurement mode register. */
data[0] = AKM_REG_CNTL;
if (i2c_write(st.hw->addr, st.reg->s1_reg, 1, data))
return -1;
/* Enable slave 1, 1-byte writes. */
data[0] = BIT_SLAVE_EN | 1;
if (i2c_write(st.hw->addr, st.reg->s1_ctrl, 1, data))
return -1;
/* Set slave 1 data. */
data[0] = AKM_SINGLE_MEASUREMENT;
if (i2c_write(st.hw->addr, st.reg->s1_do, 1, data))
return -1;
/* Trigger slave 0 and slave 1 actions at each sample. */
data[0] = 0x03;
if (i2c_write(st.hw->addr, st.reg->i2c_delay_ctrl, 1, data))
return -1;
#ifdef MPU9150
/* For the MPU9150, the auxiliary I2C bus needs to be set to VDD. */
data[0] = BIT_I2C_MST_VDDIO;
if (i2c_write(st.hw->addr, st.reg->yg_offs_tc, 1, data))
return -1;
#endif
return 0;
#else
return -1;
#endif
}
/**
* @brief Read raw compass data.
* @param[out] data Raw data in hardware units.
* @param[out] timestamp Timestamp in milliseconds. Null if not needed.
* @return 0 if successful.
*/
int mpu_get_compass_reg(short *data, unsigned long *timestamp)
{
#ifdef AK89xx_SECONDARY
unsigned char tmp[9];
if (!(st.chip_cfg.sensors & INV_XYZ_COMPASS))
return -1;
#ifdef AK89xx_BYPASS
if (i2c_read(st.chip_cfg.compass_addr, AKM_REG_ST1, 8, tmp))
return -1;
tmp[8] = AKM_SINGLE_MEASUREMENT;
if (i2c_write(st.chip_cfg.compass_addr, AKM_REG_CNTL, 1, tmp+8))
return -1;
#else
if (i2c_read(st.hw->addr, st.reg->raw_compass, 8, tmp))
return -1;
#endif
#if defined AK8975_SECONDARY
/* AK8975 doesn't have the overrun error bit. */
if (!(tmp[0] & AKM_DATA_READY))
return -2;
if ((tmp[7] & AKM_OVERFLOW) || (tmp[7] & AKM_DATA_ERROR))
return -3;
#elif defined AK8963_SECONDARY
/* AK8963 doesn't have the data read error bit. */
if (!(tmp[0] & AKM_DATA_READY) || (tmp[0] & AKM_DATA_OVERRUN))
return -2;
if (tmp[7] & AKM_OVERFLOW)
return -3;
#endif
data[0] = (tmp[2] << 8) | tmp[1];
data[1] = (tmp[4] << 8) | tmp[3];
data[2] = (tmp[6] << 8) | tmp[5];
data[0] = ((long)data[0] * st.chip_cfg.mag_sens_adj[0]) >> 8;
data[1] = ((long)data[1] * st.chip_cfg.mag_sens_adj[1]) >> 8;
data[2] = ((long)data[2] * st.chip_cfg.mag_sens_adj[2]) >> 8;
if (timestamp)
get_ms(timestamp);
return 0;
#else
return -1;
#endif
}
/**
* @brief Get the compass full-scale range.
* @param[out] fsr Current full-scale range.
* @return 0 if successful.
*/
int mpu_get_compass_fsr(unsigned short *fsr)
{
#ifdef AK89xx_SECONDARY
fsr[0] = st.hw->compass_fsr;
return 0;
#else
return -1;
#endif
}
/**
* @brief Enters LP accel motion interrupt mode.
* The behavior of this feature is very different between the MPU6050 and the
* MPU6500. Each chip's version of this feature is explained below.
*
* \n MPU6050:
* \n When this mode is first enabled, the hardware captures a single accel
* sample, and subsequent samples are compared with this one to determine if
* the device is in motion. Therefore, whenever this "locked" sample needs to
* be changed, this function must be called again.
*
* \n The hardware motion threshold can be between 32mg and 8160mg in 32mg
* increments.
*
* \n Low-power accel mode supports the following frequencies:
* \n 1.25Hz, 5Hz, 20Hz, 40Hz
*
* \n MPU6500:
* \n Unlike the MPU6050 version, the hardware does not "lock in" a reference
* sample. The hardware monitors the accel data and detects any large change
* over a short period of time.
*
* \n The hardware motion threshold can be between 4mg and 1020mg in 4mg
* increments.
*
* \n MPU6500 Low-power accel mode supports the following frequencies:
* \n 1.25Hz, 2.5Hz, 5Hz, 10Hz, 20Hz, 40Hz, 80Hz, 160Hz, 320Hz, 640Hz
*
* \n\n NOTES:
* \n The driver will round down @e thresh to the nearest supported value if
* an unsupported threshold is selected.
* \n To select a fractional wake-up frequency, round down the value passed to
* @e lpa_freq.
* \n The MPU6500 does not support a delay parameter. If this function is used
* for the MPU6500, the value passed to @e time will be ignored.
* \n To disable this mode, set @e lpa_freq to zero. The driver will restore
* the previous configuration.
*
* @param[in] thresh Motion threshold in mg.
* @param[in] time Duration in milliseconds that the accel data must
* exceed @e thresh before motion is reported.
* @param[in] lpa_freq Minimum sampling rate, or zero to disable.
* @return 0 if successful.
*/
int mpu_lp_motion_interrupt(unsigned short thresh, unsigned char time,
unsigned char lpa_freq)
{
unsigned char data[3];
if (lpa_freq) {
unsigned char thresh_hw;
#if defined MPU6050
/* TODO: Make these const/#defines. */
/* 1LSb = 32mg. */
if (thresh > 8160)
thresh_hw = 255;
else if (thresh < 32)
thresh_hw = 1;
else
thresh_hw = thresh >> 5;
#elif defined MPU6500
/* 1LSb = 4mg. */
if (thresh > 1020)
thresh_hw = 255;
else if (thresh < 4)
thresh_hw = 1;
else
thresh_hw = thresh >> 2;
#endif
if (!time)
/* Minimum duration must be 1ms. */
time = 1;
#if defined MPU6050
if (lpa_freq > 40)
#elif defined MPU6500
if (lpa_freq > 640)
#endif
/* At this point, the chip has not been re-configured, so the
* function can safely exit.
*/
return -1;
if (!st.chip_cfg.int_motion_only) {
/* Store current settings for later. */
if (st.chip_cfg.dmp_on) {
mpu_set_dmp_state(0);
st.chip_cfg.cache.dmp_on = 1;
} else
st.chip_cfg.cache.dmp_on = 0;
mpu_get_gyro_fsr(&st.chip_cfg.cache.gyro_fsr);
mpu_get_accel_fsr(&st.chip_cfg.cache.accel_fsr);
mpu_get_lpf(&st.chip_cfg.cache.lpf);
mpu_get_sample_rate(&st.chip_cfg.cache.sample_rate);
st.chip_cfg.cache.sensors_on = st.chip_cfg.sensors;
mpu_get_fifo_config(&st.chip_cfg.cache.fifo_sensors);
}
#ifdef MPU6050
/* Disable hardware interrupts for now. */
set_int_enable(0);
/* Enter full-power accel-only mode. */
mpu_lp_accel_mode(0);
/* Override current LPF (and HPF) settings to obtain a valid accel
* reading.
*/
data[0] = INV_FILTER_256HZ_NOLPF2;
if (i2c_write(st.hw->addr, st.reg->lpf, 1, data))
return -1;
/* NOTE: Digital high pass filter should be configured here. Since this
* driver doesn't modify those bits anywhere, they should already be
* cleared by default.
*/
/* Configure the device to send motion interrupts. */
/* Enable motion interrupt. */
data[0] = BIT_MOT_INT_EN;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, data))
goto lp_int_restore;
/* Set motion interrupt parameters. */
data[0] = thresh_hw;
data[1] = time;
if (i2c_write(st.hw->addr, st.reg->motion_thr, 2, data))
goto lp_int_restore;
/* Force hardware to "lock" current accel sample. */
delay_ms(5);
data[0] = (st.chip_cfg.accel_fsr << 3) | BITS_HPF;
if (i2c_write(st.hw->addr, st.reg->accel_cfg, 1, data))
goto lp_int_restore;
/* Set up LP accel mode. */
data[0] = BIT_LPA_CYCLE;
if (lpa_freq == 1)
data[1] = INV_LPA_1_25HZ;
else if (lpa_freq <= 5)
data[1] = INV_LPA_5HZ;
else if (lpa_freq <= 20)
data[1] = INV_LPA_20HZ;
else
data[1] = INV_LPA_40HZ;
data[1] = (data[1] << 6) | BIT_STBY_XYZG;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 2, data))
goto lp_int_restore;
st.chip_cfg.int_motion_only = 1;
return 0;
#elif defined MPU6500
/* Disable hardware interrupts. */
set_int_enable(0);
/* Enter full-power accel-only mode, no FIFO/DMP. */
data[0] = 0;
data[1] = 0;
data[2] = BIT_STBY_XYZG;
if (i2c_write(st.hw->addr, st.reg->user_ctrl, 3, data))
goto lp_int_restore;
/* Set motion threshold. */
data[0] = thresh_hw;
if (i2c_write(st.hw->addr, st.reg->motion_thr, 1, data))
goto lp_int_restore;
/* Set wake frequency. */
if (lpa_freq == 1)
data[0] = INV_LPA_1_25HZ;
else if (lpa_freq == 2)
data[0] = INV_LPA_2_5HZ;
else if (lpa_freq <= 5)
data[0] = INV_LPA_5HZ;
else if (lpa_freq <= 10)
data[0] = INV_LPA_10HZ;
else if (lpa_freq <= 20)
data[0] = INV_LPA_20HZ;
else if (lpa_freq <= 40)
data[0] = INV_LPA_40HZ;
else if (lpa_freq <= 80)
data[0] = INV_LPA_80HZ;
else if (lpa_freq <= 160)
data[0] = INV_LPA_160HZ;
else if (lpa_freq <= 320)
data[0] = INV_LPA_320HZ;
else
data[0] = INV_LPA_640HZ;
if (i2c_write(st.hw->addr, st.reg->lp_accel_odr, 1, data))
goto lp_int_restore;
/* Enable motion interrupt (MPU6500 version). */
data[0] = BITS_WOM_EN;
if (i2c_write(st.hw->addr, st.reg->accel_intel, 1, data))
goto lp_int_restore;
/* Enable cycle mode. */
data[0] = BIT_LPA_CYCLE;
if (i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, data))
goto lp_int_restore;
/* Enable interrupt. */
data[0] = BIT_MOT_INT_EN;
if (i2c_write(st.hw->addr, st.reg->int_enable, 1, data))
goto lp_int_restore;
st.chip_cfg.int_motion_only = 1;
return 0;
#endif
} else {
/* Don't "restore" the previous state if no state has been saved. */
int ii;
char *cache_ptr = (char*)&st.chip_cfg.cache;
for (ii = 0; ii < sizeof(st.chip_cfg.cache); ii++) {
if (cache_ptr[ii] != 0)
goto lp_int_restore;
}
/* If we reach this point, motion interrupt mode hasn't been used yet. */
return -1;
}
lp_int_restore:
/* Set to invalid values to ensure no I2C writes are skipped. */
st.chip_cfg.gyro_fsr = 0xFF;
st.chip_cfg.accel_fsr = 0xFF;
st.chip_cfg.lpf = 0xFF;
st.chip_cfg.sample_rate = 0xFFFF;
st.chip_cfg.sensors = 0xFF;
st.chip_cfg.fifo_enable = 0xFF;
st.chip_cfg.clk_src = INV_CLK_PLL;
mpu_set_sensors(st.chip_cfg.cache.sensors_on);
mpu_set_gyro_fsr(st.chip_cfg.cache.gyro_fsr);
mpu_set_accel_fsr(st.chip_cfg.cache.accel_fsr);
mpu_set_lpf(st.chip_cfg.cache.lpf);
mpu_set_sample_rate(st.chip_cfg.cache.sample_rate);
mpu_configure_fifo(st.chip_cfg.cache.fifo_sensors);
if (st.chip_cfg.cache.dmp_on)
mpu_set_dmp_state(1);
#ifdef MPU6500
/* Disable motion interrupt (MPU6500 version). */
data[0] = 0;
if (i2c_write(st.hw->addr, st.reg->accel_intel, 1, data))
goto lp_int_restore;
#endif
st.chip_cfg.int_motion_only = 0;
return 0;
}
/**
* @}
*/
(4) inv_mpu.h
/*
$License:
Copyright (C) 2011-2012 InvenSense Corporation, All Rights Reserved.
See included License.txt for License information.
$
*/
/**
* @addtogroup DRIVERS Sensor Driver Layer
* @brief Hardware drivers to communicate with sensors via I2C.
*
* @{
* @file inv_mpu.h
* @brief An I2C-based driver for Invensense gyroscopes.
* @details This driver currently works for the following devices:
* MPU6050
* MPU6500
* MPU9150 (or MPU6050 w/ AK8975 on the auxiliary bus)
* MPU9250 (or MPU6500 w/ AK8963 on the auxiliary bus)
*/
#ifndef _INV_MPU_H_
#define _INV_MPU_H_
#define INV_X_GYRO (0x40)
#define INV_Y_GYRO (0x20)
#define INV_Z_GYRO (0x10)
#define INV_XYZ_GYRO (INV_X_GYRO | INV_Y_GYRO | INV_Z_GYRO)
#define INV_XYZ_ACCEL (0x08)
#define INV_XYZ_COMPASS (0x01)
struct int_param_s {
#if defined EMPL_TARGET_MSP430 || defined MOTION_DRIVER_TARGET_MSP430
void (*cb)(void);
unsigned short pin;
unsigned char lp_exit;
unsigned char active_low;
#elif defined EMPL_TARGET_UC3L0
unsigned long pin;
void (*cb)(volatile void*);
void *arg;
#elif defined STM32F10X_HD //自行添加的一行,避免编译错误,实际没用到
void (*cb)(void);
#endif
};
#define MPU_INT_STATUS_DATA_READY (0x0001)
#define MPU_INT_STATUS_DMP (0x0002)
#define MPU_INT_STATUS_PLL_READY (0x0004)
#define MPU_INT_STATUS_I2C_MST (0x0008)
#define MPU_INT_STATUS_FIFO_OVERFLOW (0x0010)
#define MPU_INT_STATUS_ZMOT (0x0020)
#define MPU_INT_STATUS_MOT (0x0040)
#define MPU_INT_STATUS_FREE_FALL (0x0080)
#define MPU_INT_STATUS_DMP_0 (0x0100)
#define MPU_INT_STATUS_DMP_1 (0x0200)
#define MPU_INT_STATUS_DMP_2 (0x0400)
#define MPU_INT_STATUS_DMP_3 (0x0800)
#define MPU_INT_STATUS_DMP_4 (0x1000)
#define MPU_INT_STATUS_DMP_5 (0x2000)
/* Set up APIs */
int mpu_init(struct int_param_s *int_param);
int mpu_init_slave(void);
int mpu_set_bypass(unsigned char bypass_on);
/* Configuration APIs */
int mpu_lp_accel_mode(unsigned char rate);
int mpu_lp_motion_interrupt(unsigned short thresh, unsigned char time,
unsigned char lpa_freq);
int mpu_set_int_level(unsigned char active_low);
int mpu_set_int_latched(unsigned char enable);
int mpu_set_dmp_state(unsigned char enable);
int mpu_get_dmp_state(unsigned char *enabled);
int mpu_get_lpf(unsigned short *lpf);
int mpu_set_lpf(unsigned short lpf);
int mpu_get_gyro_fsr(unsigned short *fsr);
int mpu_set_gyro_fsr(unsigned short fsr);
int mpu_get_accel_fsr(unsigned char *fsr);
int mpu_set_accel_fsr(unsigned char fsr);
int mpu_get_compass_fsr(unsigned short *fsr);
int mpu_get_gyro_sens(float *sens);
int mpu_get_accel_sens(unsigned short *sens);
int mpu_get_sample_rate(unsigned short *rate);
int mpu_set_sample_rate(unsigned short rate);
int mpu_get_compass_sample_rate(unsigned short *rate);
int mpu_set_compass_sample_rate(unsigned short rate);
int mpu_get_fifo_config(unsigned char *sensors);
int mpu_configure_fifo(unsigned char sensors);
int mpu_get_power_state(unsigned char *power_on);
int mpu_set_sensors(unsigned char sensors);
int mpu_set_accel_bias(const long *accel_bias);
/* Data getter/setter APIs */
int mpu_get_gyro_reg(short *data, unsigned long *timestamp);
int mpu_get_accel_reg(short *data, unsigned long *timestamp);
int mpu_get_compass_reg(short *data, unsigned long *timestamp);
int mpu_get_temperature(long *data, unsigned long *timestamp);
int mpu_get_int_status(short *status);
int mpu_read_fifo(short *gyro, short *accel, unsigned long *timestamp,
unsigned char *sensors, unsigned char *more);
int mpu_read_fifo_stream(unsigned short length, unsigned char *data,
unsigned char *more);
int mpu_reset_fifo(void);
int mpu_write_mem(unsigned short mem_addr, unsigned short length,
unsigned char *data);
int mpu_read_mem(unsigned short mem_addr, unsigned short length,
unsigned char *data);
int mpu_load_firmware(unsigned short length, const unsigned char *firmware,
unsigned short start_addr, unsigned short sample_rate);
int mpu_reg_dump(void);
int mpu_read_reg(unsigned char reg, unsigned char *data);
int mpu_run_self_test(long *gyro, long *accel);
int mpu_register_tap_cb(void (*func)(unsigned char, unsigned char));
#endif /* #ifndef _INV_MPU_H_ */
(5) dmpKey.h
/*
$License:
Copyright (C) 2011 InvenSense Corporation, All Rights Reserved.
$
*/
#ifndef DMPKEY_H__
#define DMPKEY_H__
#define KEY_CFG_25 (0)
#define KEY_CFG_24 (KEY_CFG_25 + 1)
#define KEY_CFG_26 (KEY_CFG_24 + 1)
#define KEY_CFG_27 (KEY_CFG_26 + 1)
#define KEY_CFG_21 (KEY_CFG_27 + 1)
#define KEY_CFG_20 (KEY_CFG_21 + 1)
#define KEY_CFG_TAP4 (KEY_CFG_20 + 1)
#define KEY_CFG_TAP5 (KEY_CFG_TAP4 + 1)
#define KEY_CFG_TAP6 (KEY_CFG_TAP5 + 1)
#define KEY_CFG_TAP7 (KEY_CFG_TAP6 + 1)
#define KEY_CFG_TAP0 (KEY_CFG_TAP7 + 1)
#define KEY_CFG_TAP1 (KEY_CFG_TAP0 + 1)
#define KEY_CFG_TAP2 (KEY_CFG_TAP1 + 1)
#define KEY_CFG_TAP3 (KEY_CFG_TAP2 + 1)
#define KEY_CFG_TAP_QUANTIZE (KEY_CFG_TAP3 + 1)
#define KEY_CFG_TAP_JERK (KEY_CFG_TAP_QUANTIZE + 1)
#define KEY_CFG_DR_INT (KEY_CFG_TAP_JERK + 1)
#define KEY_CFG_AUTH (KEY_CFG_DR_INT + 1)
#define KEY_CFG_TAP_SAVE_ACCB (KEY_CFG_AUTH + 1)
#define KEY_CFG_TAP_CLEAR_STICKY (KEY_CFG_TAP_SAVE_ACCB + 1)
#define KEY_CFG_FIFO_ON_EVENT (KEY_CFG_TAP_CLEAR_STICKY + 1)
#define KEY_FCFG_ACCEL_INPUT (KEY_CFG_FIFO_ON_EVENT + 1)
#define KEY_FCFG_ACCEL_INIT (KEY_FCFG_ACCEL_INPUT + 1)
#define KEY_CFG_23 (KEY_FCFG_ACCEL_INIT + 1)
#define KEY_FCFG_1 (KEY_CFG_23 + 1)
#define KEY_FCFG_3 (KEY_FCFG_1 + 1)
#define KEY_FCFG_2 (KEY_FCFG_3 + 1)
#define KEY_CFG_3D (KEY_FCFG_2 + 1)
#define KEY_CFG_3B (KEY_CFG_3D + 1)
#define KEY_CFG_3C (KEY_CFG_3B + 1)
#define KEY_FCFG_5 (KEY_CFG_3C + 1)
#define KEY_FCFG_4 (KEY_FCFG_5 + 1)
#define KEY_FCFG_7 (KEY_FCFG_4 + 1)
#define KEY_FCFG_FSCALE (KEY_FCFG_7 + 1)
#define KEY_FCFG_AZ (KEY_FCFG_FSCALE + 1)
#define KEY_FCFG_6 (KEY_FCFG_AZ + 1)
#define KEY_FCFG_LSB4 (KEY_FCFG_6 + 1)
#define KEY_CFG_12 (KEY_FCFG_LSB4 + 1)
#define KEY_CFG_14 (KEY_CFG_12 + 1)
#define KEY_CFG_15 (KEY_CFG_14 + 1)
#define KEY_CFG_16 (KEY_CFG_15 + 1)
#define KEY_CFG_18 (KEY_CFG_16 + 1)
#define KEY_CFG_6 (KEY_CFG_18 + 1)
#define KEY_CFG_7 (KEY_CFG_6 + 1)
#define KEY_CFG_4 (KEY_CFG_7 + 1)
#define KEY_CFG_5 (KEY_CFG_4 + 1)
#define KEY_CFG_2 (KEY_CFG_5 + 1)
#define KEY_CFG_3 (KEY_CFG_2 + 1)
#define KEY_CFG_1 (KEY_CFG_3 + 1)
#define KEY_CFG_EXTERNAL (KEY_CFG_1 + 1)
#define KEY_CFG_8 (KEY_CFG_EXTERNAL + 1)
#define KEY_CFG_9 (KEY_CFG_8 + 1)
#define KEY_CFG_ORIENT_3 (KEY_CFG_9 + 1)
#define KEY_CFG_ORIENT_2 (KEY_CFG_ORIENT_3 + 1)
#define KEY_CFG_ORIENT_1 (KEY_CFG_ORIENT_2 + 1)
#define KEY_CFG_GYRO_SOURCE (KEY_CFG_ORIENT_1 + 1)
#define KEY_CFG_ORIENT_IRQ_1 (KEY_CFG_GYRO_SOURCE + 1)
#define KEY_CFG_ORIENT_IRQ_2 (KEY_CFG_ORIENT_IRQ_1 + 1)
#define KEY_CFG_ORIENT_IRQ_3 (KEY_CFG_ORIENT_IRQ_2 + 1)
#define KEY_FCFG_MAG_VAL (KEY_CFG_ORIENT_IRQ_3 + 1)
#define KEY_FCFG_MAG_MOV (KEY_FCFG_MAG_VAL + 1)
#define KEY_CFG_LP_QUAT (KEY_FCFG_MAG_MOV + 1)
/* MPU6050 keys */
#define KEY_CFG_ACCEL_FILTER (KEY_CFG_LP_QUAT + 1)
#define KEY_CFG_MOTION_BIAS (KEY_CFG_ACCEL_FILTER + 1)
#define KEY_TEMPLABEL (KEY_CFG_MOTION_BIAS + 1)
#define KEY_D_0_22 (KEY_TEMPLABEL + 1)
#define KEY_D_0_24 (KEY_D_0_22 + 1)
#define KEY_D_0_36 (KEY_D_0_24 + 1)
#define KEY_D_0_52 (KEY_D_0_36 + 1)
#define KEY_D_0_96 (KEY_D_0_52 + 1)
#define KEY_D_0_104 (KEY_D_0_96 + 1)
#define KEY_D_0_108 (KEY_D_0_104 + 1)
#define KEY_D_0_163 (KEY_D_0_108 + 1)
#define KEY_D_0_188 (KEY_D_0_163 + 1)
#define KEY_D_0_192 (KEY_D_0_188 + 1)
#define KEY_D_0_224 (KEY_D_0_192 + 1)
#define KEY_D_0_228 (KEY_D_0_224 + 1)
#define KEY_D_0_232 (KEY_D_0_228 + 1)
#define KEY_D_0_236 (KEY_D_0_232 + 1)
#define KEY_DMP_PREVPTAT (KEY_D_0_236 + 1)
#define KEY_D_1_2 (KEY_DMP_PREVPTAT + 1)
#define KEY_D_1_4 (KEY_D_1_2 + 1)
#define KEY_D_1_8 (KEY_D_1_4 + 1)
#define KEY_D_1_10 (KEY_D_1_8 + 1)
#define KEY_D_1_24 (KEY_D_1_10 + 1)
#define KEY_D_1_28 (KEY_D_1_24 + 1)
#define KEY_D_1_36 (KEY_D_1_28 + 1)
#define KEY_D_1_40 (KEY_D_1_36 + 1)
#define KEY_D_1_44 (KEY_D_1_40 + 1)
#define KEY_D_1_72 (KEY_D_1_44 + 1)
#define KEY_D_1_74 (KEY_D_1_72 + 1)
#define KEY_D_1_79 (KEY_D_1_74 + 1)
#define KEY_D_1_88 (KEY_D_1_79 + 1)
#define KEY_D_1_90 (KEY_D_1_88 + 1)
#define KEY_D_1_92 (KEY_D_1_90 + 1)
#define KEY_D_1_96 (KEY_D_1_92 + 1)
#define KEY_D_1_98 (KEY_D_1_96 + 1)
#define KEY_D_1_100 (KEY_D_1_98 + 1)
#define KEY_D_1_106 (KEY_D_1_100 + 1)
#define KEY_D_1_108 (KEY_D_1_106 + 1)
#define KEY_D_1_112 (KEY_D_1_108 + 1)
#define KEY_D_1_128 (KEY_D_1_112 + 1)
#define KEY_D_1_152 (KEY_D_1_128 + 1)
#define KEY_D_1_160 (KEY_D_1_152 + 1)
#define KEY_D_1_168 (KEY_D_1_160 + 1)
#define KEY_D_1_175 (KEY_D_1_168 + 1)
#define KEY_D_1_176 (KEY_D_1_175 + 1)
#define KEY_D_1_178 (KEY_D_1_176 + 1)
#define KEY_D_1_179 (KEY_D_1_178 + 1)
#define KEY_D_1_218 (KEY_D_1_179 + 1)
#define KEY_D_1_232 (KEY_D_1_218 + 1)
#define KEY_D_1_236 (KEY_D_1_232 + 1)
#define KEY_D_1_240 (KEY_D_1_236 + 1)
#define KEY_D_1_244 (KEY_D_1_240 + 1)
#define KEY_D_1_250 (KEY_D_1_244 + 1)
#define KEY_D_1_252 (KEY_D_1_250 + 1)
#define KEY_D_2_12 (KEY_D_1_252 + 1)
#define KEY_D_2_96 (KEY_D_2_12 + 1)
#define KEY_D_2_108 (KEY_D_2_96 + 1)
#define KEY_D_2_208 (KEY_D_2_108 + 1)
#define KEY_FLICK_MSG (KEY_D_2_208 + 1)
#define KEY_FLICK_COUNTER (KEY_FLICK_MSG + 1)
#define KEY_FLICK_LOWER (KEY_FLICK_COUNTER + 1)
#define KEY_CFG_FLICK_IN (KEY_FLICK_LOWER + 1)
#define KEY_FLICK_UPPER (KEY_CFG_FLICK_IN + 1)
#define KEY_CGNOTICE_INTR (KEY_FLICK_UPPER + 1)
#define KEY_D_2_224 (KEY_CGNOTICE_INTR + 1)
#define KEY_D_2_244 (KEY_D_2_224 + 1)
#define KEY_D_2_248 (KEY_D_2_244 + 1)
#define KEY_D_2_252 (KEY_D_2_248 + 1)
#define KEY_D_GYRO_BIAS_X (KEY_D_2_252 + 1)
#define KEY_D_GYRO_BIAS_Y (KEY_D_GYRO_BIAS_X + 1)
#define KEY_D_GYRO_BIAS_Z (KEY_D_GYRO_BIAS_Y + 1)
#define KEY_D_ACC_BIAS_X (KEY_D_GYRO_BIAS_Z + 1)
#define KEY_D_ACC_BIAS_Y (KEY_D_ACC_BIAS_X + 1)
#define KEY_D_ACC_BIAS_Z (KEY_D_ACC_BIAS_Y + 1)
#define KEY_D_GYRO_ENABLE (KEY_D_ACC_BIAS_Z + 1)
#define KEY_D_ACCEL_ENABLE (KEY_D_GYRO_ENABLE + 1)
#define KEY_D_QUAT_ENABLE (KEY_D_ACCEL_ENABLE +1)
#define KEY_D_OUTPUT_ENABLE (KEY_D_QUAT_ENABLE + 1)
#define KEY_D_CR_TIME_G (KEY_D_OUTPUT_ENABLE + 1)
#define KEY_D_CR_TIME_A (KEY_D_CR_TIME_G + 1)
#define KEY_D_CR_TIME_Q (KEY_D_CR_TIME_A + 1)
#define KEY_D_CS_TAX (KEY_D_CR_TIME_Q + 1)
#define KEY_D_CS_TAY (KEY_D_CS_TAX + 1)
#define KEY_D_CS_TAZ (KEY_D_CS_TAY + 1)
#define KEY_D_CS_TGX (KEY_D_CS_TAZ + 1)
#define KEY_D_CS_TGY (KEY_D_CS_TGX + 1)
#define KEY_D_CS_TGZ (KEY_D_CS_TGY + 1)
#define KEY_D_CS_TQ0 (KEY_D_CS_TGZ + 1)
#define KEY_D_CS_TQ1 (KEY_D_CS_TQ0 + 1)
#define KEY_D_CS_TQ2 (KEY_D_CS_TQ1 + 1)
#define KEY_D_CS_TQ3 (KEY_D_CS_TQ2 + 1)
/* Compass keys */
#define KEY_CPASS_BIAS_X (KEY_D_CS_TQ3 + 1)
#define KEY_CPASS_BIAS_Y (KEY_CPASS_BIAS_X + 1)
#define KEY_CPASS_BIAS_Z (KEY_CPASS_BIAS_Y + 1)
#define KEY_CPASS_MTX_00 (KEY_CPASS_BIAS_Z + 1)
#define KEY_CPASS_MTX_01 (KEY_CPASS_MTX_00 + 1)
#define KEY_CPASS_MTX_02 (KEY_CPASS_MTX_01 + 1)
#define KEY_CPASS_MTX_10 (KEY_CPASS_MTX_02 + 1)
#define KEY_CPASS_MTX_11 (KEY_CPASS_MTX_10 + 1)
#define KEY_CPASS_MTX_12 (KEY_CPASS_MTX_11 + 1)
#define KEY_CPASS_MTX_20 (KEY_CPASS_MTX_12 + 1)
#define KEY_CPASS_MTX_21 (KEY_CPASS_MTX_20 + 1)
#define KEY_CPASS_MTX_22 (KEY_CPASS_MTX_21 + 1)
/* Gesture Keys */
#define KEY_DMP_TAPW_MIN (KEY_CPASS_MTX_22 + 1)
#define KEY_DMP_TAP_THR_X (KEY_DMP_TAPW_MIN + 1)
#define KEY_DMP_TAP_THR_Y (KEY_DMP_TAP_THR_X + 1)
#define KEY_DMP_TAP_THR_Z (KEY_DMP_TAP_THR_Y + 1)
#define KEY_DMP_SH_TH_Y (KEY_DMP_TAP_THR_Z + 1)
#define KEY_DMP_SH_TH_X (KEY_DMP_SH_TH_Y + 1)
#define KEY_DMP_SH_TH_Z (KEY_DMP_SH_TH_X + 1)
#define KEY_DMP_ORIENT (KEY_DMP_SH_TH_Z + 1)
#define KEY_D_ACT0 (KEY_DMP_ORIENT + 1)
#define KEY_D_ACSX (KEY_D_ACT0 + 1)
#define KEY_D_ACSY (KEY_D_ACSX + 1)
#define KEY_D_ACSZ (KEY_D_ACSY + 1)
#define KEY_X_GRT_Y_TMP (KEY_D_ACSZ + 1)
#define KEY_SKIP_X_GRT_Y_TMP (KEY_X_GRT_Y_TMP + 1)
#define KEY_SKIP_END_COMPARE (KEY_SKIP_X_GRT_Y_TMP + 1)
#define KEY_END_COMPARE_Y_X_TMP2 (KEY_SKIP_END_COMPARE + 1)
#define KEY_CFG_ANDROID_ORIENT_INT (KEY_END_COMPARE_Y_X_TMP2 + 1)
#define KEY_NO_ORIENT_INTERRUPT (KEY_CFG_ANDROID_ORIENT_INT + 1)
#define KEY_END_COMPARE_Y_X_TMP (KEY_NO_ORIENT_INTERRUPT + 1)
#define KEY_END_ORIENT_1 (KEY_END_COMPARE_Y_X_TMP + 1)
#define KEY_END_COMPARE_Y_X (KEY_END_ORIENT_1 + 1)
#define KEY_END_ORIENT (KEY_END_COMPARE_Y_X + 1)
#define KEY_X_GRT_Y (KEY_END_ORIENT + 1)
#define KEY_NOT_TIME_MINUS_1 (KEY_X_GRT_Y + 1)
#define KEY_END_COMPARE_Y_X_TMP3 (KEY_NOT_TIME_MINUS_1 + 1)
#define KEY_X_GRT_Y_TMP2 (KEY_END_COMPARE_Y_X_TMP3 + 1)
/* Authenticate Keys */
#define KEY_D_AUTH_OUT (KEY_X_GRT_Y_TMP2 + 1)
#define KEY_D_AUTH_IN (KEY_D_AUTH_OUT + 1)
#define KEY_D_AUTH_A (KEY_D_AUTH_IN + 1)
#define KEY_D_AUTH_B (KEY_D_AUTH_A + 1)
/* Pedometer standalone only keys */
#define KEY_D_PEDSTD_BP_B (KEY_D_AUTH_B + 1)
#define KEY_D_PEDSTD_HP_A (KEY_D_PEDSTD_BP_B + 1)
#define KEY_D_PEDSTD_HP_B (KEY_D_PEDSTD_HP_A + 1)
#define KEY_D_PEDSTD_BP_A4 (KEY_D_PEDSTD_HP_B + 1)
#define KEY_D_PEDSTD_BP_A3 (KEY_D_PEDSTD_BP_A4 + 1)
#define KEY_D_PEDSTD_BP_A2 (KEY_D_PEDSTD_BP_A3 + 1)
#define KEY_D_PEDSTD_BP_A1 (KEY_D_PEDSTD_BP_A2 + 1)
#define KEY_D_PEDSTD_INT_THRSH (KEY_D_PEDSTD_BP_A1 + 1)
#define KEY_D_PEDSTD_CLIP (KEY_D_PEDSTD_INT_THRSH + 1)
#define KEY_D_PEDSTD_SB (KEY_D_PEDSTD_CLIP + 1)
#define KEY_D_PEDSTD_SB_TIME (KEY_D_PEDSTD_SB + 1)
#define KEY_D_PEDSTD_PEAKTHRSH (KEY_D_PEDSTD_SB_TIME + 1)
#define KEY_D_PEDSTD_TIML (KEY_D_PEDSTD_PEAKTHRSH + 1)
#define KEY_D_PEDSTD_TIMH (KEY_D_PEDSTD_TIML + 1)
#define KEY_D_PEDSTD_PEAK (KEY_D_PEDSTD_TIMH + 1)
#define KEY_D_PEDSTD_TIMECTR (KEY_D_PEDSTD_PEAK + 1)
#define KEY_D_PEDSTD_STEPCTR (KEY_D_PEDSTD_TIMECTR + 1)
#define KEY_D_PEDSTD_WALKTIME (KEY_D_PEDSTD_STEPCTR + 1)
#define KEY_D_PEDSTD_DECI (KEY_D_PEDSTD_WALKTIME + 1)
/*Host Based No Motion*/
#define KEY_D_HOST_NO_MOT (KEY_D_PEDSTD_DECI + 1)
/* EIS keys */
#define KEY_P_EIS_FIFO_FOOTER (KEY_D_HOST_NO_MOT + 1)
#define KEY_P_EIS_FIFO_YSHIFT (KEY_P_EIS_FIFO_FOOTER + 1)
#define KEY_P_EIS_DATA_RATE (KEY_P_EIS_FIFO_YSHIFT + 1)
#define KEY_P_EIS_FIFO_XSHIFT (KEY_P_EIS_DATA_RATE + 1)
#define KEY_P_EIS_FIFO_SYNC (KEY_P_EIS_FIFO_XSHIFT + 1)
#define KEY_P_EIS_FIFO_ZSHIFT (KEY_P_EIS_FIFO_SYNC + 1)
#define KEY_P_EIS_FIFO_READY (KEY_P_EIS_FIFO_ZSHIFT + 1)
#define KEY_DMP_FOOTER (KEY_P_EIS_FIFO_READY + 1)
#define KEY_DMP_INTX_HC (KEY_DMP_FOOTER + 1)
#define KEY_DMP_INTX_PH (KEY_DMP_INTX_HC + 1)
#define KEY_DMP_INTX_SH (KEY_DMP_INTX_PH + 1)
#define KEY_DMP_AINV_SH (KEY_DMP_INTX_SH + 1)
#define KEY_DMP_A_INV_XH (KEY_DMP_AINV_SH + 1)
#define KEY_DMP_AINV_PH (KEY_DMP_A_INV_XH + 1)
#define KEY_DMP_CTHX_H (KEY_DMP_AINV_PH + 1)
#define KEY_DMP_CTHY_H (KEY_DMP_CTHX_H + 1)
#define KEY_DMP_CTHZ_H (KEY_DMP_CTHY_H + 1)
#define KEY_DMP_NCTHX_H (KEY_DMP_CTHZ_H + 1)
#define KEY_DMP_NCTHY_H (KEY_DMP_NCTHX_H + 1)
#define KEY_DMP_NCTHZ_H (KEY_DMP_NCTHY_H + 1)
#define KEY_DMP_CTSQ_XH (KEY_DMP_NCTHZ_H + 1)
#define KEY_DMP_CTSQ_YH (KEY_DMP_CTSQ_XH + 1)
#define KEY_DMP_CTSQ_ZH (KEY_DMP_CTSQ_YH + 1)
#define KEY_DMP_INTX_H (KEY_DMP_CTSQ_ZH + 1)
#define KEY_DMP_INTY_H (KEY_DMP_INTX_H + 1)
#define KEY_DMP_INTZ_H (KEY_DMP_INTY_H + 1)
//#define KEY_DMP_HPX_H (KEY_DMP_INTZ_H + 1)
//#define KEY_DMP_HPY_H (KEY_DMP_HPX_H + 1)
//#define KEY_DMP_HPZ_H (KEY_DMP_HPY_H + 1)
/* Stream keys */
#define KEY_STREAM_P_GYRO_Z (KEY_DMP_INTZ_H + 1)
#define KEY_STREAM_P_GYRO_Y (KEY_STREAM_P_GYRO_Z + 1)
#define KEY_STREAM_P_GYRO_X (KEY_STREAM_P_GYRO_Y + 1)
#define KEY_STREAM_P_TEMP (KEY_STREAM_P_GYRO_X + 1)
#define KEY_STREAM_P_AUX_Y (KEY_STREAM_P_TEMP + 1)
#define KEY_STREAM_P_AUX_X (KEY_STREAM_P_AUX_Y + 1)
#define KEY_STREAM_P_AUX_Z (KEY_STREAM_P_AUX_X + 1)
#define KEY_STREAM_P_ACCEL_Y (KEY_STREAM_P_AUX_Z + 1)
#define KEY_STREAM_P_ACCEL_X (KEY_STREAM_P_ACCEL_Y + 1)
#define KEY_STREAM_P_FOOTER (KEY_STREAM_P_ACCEL_X + 1)
#define KEY_STREAM_P_ACCEL_Z (KEY_STREAM_P_FOOTER + 1)
#define NUM_KEYS (KEY_STREAM_P_ACCEL_Z + 1)
typedef struct {
unsigned short key;
unsigned short addr;
} tKeyLabel;
#define DINA0A 0x0a
#define DINA22 0x22
#define DINA42 0x42
#define DINA5A 0x5a
#define DINA06 0x06
#define DINA0E 0x0e
#define DINA16 0x16
#define DINA1E 0x1e
#define DINA26 0x26
#define DINA2E 0x2e
#define DINA36 0x36
#define DINA3E 0x3e
#define DINA46 0x46
#define DINA4E 0x4e
#define DINA56 0x56
#define DINA5E 0x5e
#define DINA66 0x66
#define DINA6E 0x6e
#define DINA76 0x76
#define DINA7E 0x7e
#define DINA00 0x00
#define DINA08 0x08
#define DINA10 0x10
#define DINA18 0x18
#define DINA20 0x20
#define DINA28 0x28
#define DINA30 0x30
#define DINA38 0x38
#define DINA40 0x40
#define DINA48 0x48
#define DINA50 0x50
#define DINA58 0x58
#define DINA60 0x60
#define DINA68 0x68
#define DINA70 0x70
#define DINA78 0x78
#define DINA04 0x04
#define DINA0C 0x0c
#define DINA14 0x14
#define DINA1C 0x1C
#define DINA24 0x24
#define DINA2C 0x2c
#define DINA34 0x34
#define DINA3C 0x3c
#define DINA44 0x44
#define DINA4C 0x4c
#define DINA54 0x54
#define DINA5C 0x5c
#define DINA64 0x64
#define DINA6C 0x6c
#define DINA74 0x74
#define DINA7C 0x7c
#define DINA01 0x01
#define DINA09 0x09
#define DINA11 0x11
#define DINA19 0x19
#define DINA21 0x21
#define DINA29 0x29
#define DINA31 0x31
#define DINA39 0x39
#define DINA41 0x41
#define DINA49 0x49
#define DINA51 0x51
#define DINA59 0x59
#define DINA61 0x61
#define DINA69 0x69
#define DINA71 0x71
#define DINA79 0x79
#define DINA25 0x25
#define DINA2D 0x2d
#define DINA35 0x35
#define DINA3D 0x3d
#define DINA4D 0x4d
#define DINA55 0x55
#define DINA5D 0x5D
#define DINA6D 0x6d
#define DINA75 0x75
#define DINA7D 0x7d
#define DINADC 0xdc
#define DINAF2 0xf2
#define DINAAB 0xab
#define DINAAA 0xaa
#define DINAF1 0xf1
#define DINADF 0xdf
#define DINADA 0xda
#define DINAB1 0xb1
#define DINAB9 0xb9
#define DINAF3 0xf3
#define DINA8B 0x8b
#define DINAA3 0xa3
#define DINA91 0x91
#define DINAB6 0xb6
#define DINAB4 0xb4
#define DINC00 0x00
#define DINC01 0x01
#define DINC02 0x02
#define DINC03 0x03
#define DINC08 0x08
#define DINC09 0x09
#define DINC0A 0x0a
#define DINC0B 0x0b
#define DINC10 0x10
#define DINC11 0x11
#define DINC12 0x12
#define DINC13 0x13
#define DINC18 0x18
#define DINC19 0x19
#define DINC1A 0x1a
#define DINC1B 0x1b
#define DINC20 0x20
#define DINC21 0x21
#define DINC22 0x22
#define DINC23 0x23
#define DINC28 0x28
#define DINC29 0x29
#define DINC2A 0x2a
#define DINC2B 0x2b
#define DINC30 0x30
#define DINC31 0x31
#define DINC32 0x32
#define DINC33 0x33
#define DINC38 0x38
#define DINC39 0x39
#define DINC3A 0x3a
#define DINC3B 0x3b
#define DINC40 0x40
#define DINC41 0x41
#define DINC42 0x42
#define DINC43 0x43
#define DINC48 0x48
#define DINC49 0x49
#define DINC4A 0x4a
#define DINC4B 0x4b
#define DINC50 0x50
#define DINC51 0x51
#define DINC52 0x52
#define DINC53 0x53
#define DINC58 0x58
#define DINC59 0x59
#define DINC5A 0x5a
#define DINC5B 0x5b
#define DINC60 0x60
#define DINC61 0x61
#define DINC62 0x62
#define DINC63 0x63
#define DINC68 0x68
#define DINC69 0x69
#define DINC6A 0x6a
#define DINC6B 0x6b
#define DINC70 0x70
#define DINC71 0x71
#define DINC72 0x72
#define DINC73 0x73
#define DINC78 0x78
#define DINC79 0x79
#define DINC7A 0x7a
#define DINC7B 0x7b
#define DIND40 0x40
#define DINA80 0x80
#define DINA90 0x90
#define DINAA0 0xa0
#define DINAC9 0xc9
#define DINACB 0xcb
#define DINACD 0xcd
#define DINACF 0xcf
#define DINAC8 0xc8
#define DINACA 0xca
#define DINACC 0xcc
#define DINACE 0xce
#define DINAD8 0xd8
#define DINADD 0xdd
#define DINAF8 0xf0
#define DINAFE 0xfe
#define DINBF8 0xf8
#define DINAC0 0xb0
#define DINAC1 0xb1
#define DINAC2 0xb4
#define DINAC3 0xb5
#define DINAC4 0xb8
#define DINAC5 0xb9
#define DINBC0 0xc0
#define DINBC2 0xc2
#define DINBC4 0xc4
#define DINBC6 0xc6
#endif // DMPKEY_H__
(6) dmpmap.h
/*
$License:
Copyright (C) 2011 InvenSense Corporation, All Rights Reserved.
$
*/
#ifndef DMPMAP_H
#define DMPMAP_H
#ifdef __cplusplus
extern "C"
{
#endif
#define DMP_PTAT 0
#define DMP_XGYR 2
#define DMP_YGYR 4
#define DMP_ZGYR 6
#define DMP_XACC 8
#define DMP_YACC 10
#define DMP_ZACC 12
#define DMP_ADC1 14
#define DMP_ADC2 16
#define DMP_ADC3 18
#define DMP_BIASUNC 20
#define DMP_FIFORT 22
#define DMP_INVGSFH 24
#define DMP_INVGSFL 26
#define DMP_1H 28
#define DMP_1L 30
#define DMP_BLPFSTCH 32
#define DMP_BLPFSTCL 34
#define DMP_BLPFSXH 36
#define DMP_BLPFSXL 38
#define DMP_BLPFSYH 40
#define DMP_BLPFSYL 42
#define DMP_BLPFSZH 44
#define DMP_BLPFSZL 46
#define DMP_BLPFMTC 48
#define DMP_SMC 50
#define DMP_BLPFMXH 52
#define DMP_BLPFMXL 54
#define DMP_BLPFMYH 56
#define DMP_BLPFMYL 58
#define DMP_BLPFMZH 60
#define DMP_BLPFMZL 62
#define DMP_BLPFC 64
#define DMP_SMCTH 66
#define DMP_0H2 68
#define DMP_0L2 70
#define DMP_BERR2H 72
#define DMP_BERR2L 74
#define DMP_BERR2NH 76
#define DMP_SMCINC 78
#define DMP_ANGVBXH 80
#define DMP_ANGVBXL 82
#define DMP_ANGVBYH 84
#define DMP_ANGVBYL 86
#define DMP_ANGVBZH 88
#define DMP_ANGVBZL 90
#define DMP_BERR1H 92
#define DMP_BERR1L 94
#define DMP_ATCH 96
#define DMP_BIASUNCSF 98
#define DMP_ACT2H 100
#define DMP_ACT2L 102
#define DMP_GSFH 104
#define DMP_GSFL 106
#define DMP_GH 108
#define DMP_GL 110
#define DMP_0_5H 112
#define DMP_0_5L 114
#define DMP_0_0H 116
#define DMP_0_0L 118
#define DMP_1_0H 120
#define DMP_1_0L 122
#define DMP_1_5H 124
#define DMP_1_5L 126
#define DMP_TMP1AH 128
#define DMP_TMP1AL 130
#define DMP_TMP2AH 132
#define DMP_TMP2AL 134
#define DMP_TMP3AH 136
#define DMP_TMP3AL 138
#define DMP_TMP4AH 140
#define DMP_TMP4AL 142
#define DMP_XACCW 144
#define DMP_TMP5 146
#define DMP_XACCB 148
#define DMP_TMP8 150
#define DMP_YACCB 152
#define DMP_TMP9 154
#define DMP_ZACCB 156
#define DMP_TMP10 158
#define DMP_DZH 160
#define DMP_DZL 162
#define DMP_XGCH 164
#define DMP_XGCL 166
#define DMP_YGCH 168
#define DMP_YGCL 170
#define DMP_ZGCH 172
#define DMP_ZGCL 174
#define DMP_YACCW 176
#define DMP_TMP7 178
#define DMP_AFB1H 180
#define DMP_AFB1L 182
#define DMP_AFB2H 184
#define DMP_AFB2L 186
#define DMP_MAGFBH 188
#define DMP_MAGFBL 190
#define DMP_QT1H 192
#define DMP_QT1L 194
#define DMP_QT2H 196
#define DMP_QT2L 198
#define DMP_QT3H 200
#define DMP_QT3L 202
#define DMP_QT4H 204
#define DMP_QT4L 206
#define DMP_CTRL1H 208
#define DMP_CTRL1L 210
#define DMP_CTRL2H 212
#define DMP_CTRL2L 214
#define DMP_CTRL3H 216
#define DMP_CTRL3L 218
#define DMP_CTRL4H 220
#define DMP_CTRL4L 222
#define DMP_CTRLS1 224
#define DMP_CTRLSF1 226
#define DMP_CTRLS2 228
#define DMP_CTRLSF2 230
#define DMP_CTRLS3 232
#define DMP_CTRLSFNLL 234
#define DMP_CTRLS4 236
#define DMP_CTRLSFNL2 238
#define DMP_CTRLSFNL 240
#define DMP_TMP30 242
#define DMP_CTRLSFJT 244
#define DMP_TMP31 246
#define DMP_TMP11 248
#define DMP_CTRLSF2_2 250
#define DMP_TMP12 252
#define DMP_CTRLSF1_2 254
#define DMP_PREVPTAT 256
#define DMP_ACCZB 258
#define DMP_ACCXB 264
#define DMP_ACCYB 266
#define DMP_1HB 272
#define DMP_1LB 274
#define DMP_0H 276
#define DMP_0L 278
#define DMP_ASR22H 280
#define DMP_ASR22L 282
#define DMP_ASR6H 284
#define DMP_ASR6L 286
#define DMP_TMP13 288
#define DMP_TMP14 290
#define DMP_FINTXH 292
#define DMP_FINTXL 294
#define DMP_FINTYH 296
#define DMP_FINTYL 298
#define DMP_FINTZH 300
#define DMP_FINTZL 302
#define DMP_TMP1BH 304
#define DMP_TMP1BL 306
#define DMP_TMP2BH 308
#define DMP_TMP2BL 310
#define DMP_TMP3BH 312
#define DMP_TMP3BL 314
#define DMP_TMP4BH 316
#define DMP_TMP4BL 318
#define DMP_STXG 320
#define DMP_ZCTXG 322
#define DMP_STYG 324
#define DMP_ZCTYG 326
#define DMP_STZG 328
#define DMP_ZCTZG 330
#define DMP_CTRLSFJT2 332
#define DMP_CTRLSFJTCNT 334
#define DMP_PVXG 336
#define DMP_TMP15 338
#define DMP_PVYG 340
#define DMP_TMP16 342
#define DMP_PVZG 344
#define DMP_TMP17 346
#define DMP_MNMFLAGH 352
#define DMP_MNMFLAGL 354
#define DMP_MNMTMH 356
#define DMP_MNMTML 358
#define DMP_MNMTMTHRH 360
#define DMP_MNMTMTHRL 362
#define DMP_MNMTHRH 364
#define DMP_MNMTHRL 366
#define DMP_ACCQD4H 368
#define DMP_ACCQD4L 370
#define DMP_ACCQD5H 372
#define DMP_ACCQD5L 374
#define DMP_ACCQD6H 376
#define DMP_ACCQD6L 378
#define DMP_ACCQD7H 380
#define DMP_ACCQD7L 382
#define DMP_ACCQD0H 384
#define DMP_ACCQD0L 386
#define DMP_ACCQD1H 388
#define DMP_ACCQD1L 390
#define DMP_ACCQD2H 392
#define DMP_ACCQD2L 394
#define DMP_ACCQD3H 396
#define DMP_ACCQD3L 398
#define DMP_XN2H 400
#define DMP_XN2L 402
#define DMP_XN1H 404
#define DMP_XN1L 406
#define DMP_YN2H 408
#define DMP_YN2L 410
#define DMP_YN1H 412
#define DMP_YN1L 414
#define DMP_YH 416
#define DMP_YL 418
#define DMP_B0H 420
#define DMP_B0L 422
#define DMP_A1H 424
#define DMP_A1L 426
#define DMP_A2H 428
#define DMP_A2L 430
#define DMP_SEM1 432
#define DMP_FIFOCNT 434
#define DMP_SH_TH_X 436
#define DMP_PACKET 438
#define DMP_SH_TH_Y 440
#define DMP_FOOTER 442
#define DMP_SH_TH_Z 444
#define DMP_TEMP29 448
#define DMP_TEMP30 450
#define DMP_XACCB_PRE 452
#define DMP_XACCB_PREL 454
#define DMP_YACCB_PRE 456
#define DMP_YACCB_PREL 458
#define DMP_ZACCB_PRE 460
#define DMP_ZACCB_PREL 462
#define DMP_TMP22 464
#define DMP_TAP_TIMER 466
#define DMP_TAP_THX 468
#define DMP_TAP_THY 472
#define DMP_TAP_THZ 476
#define DMP_TAPW_MIN 478
#define DMP_TMP25 480
#define DMP_TMP26 482
#define DMP_TMP27 484
#define DMP_TMP28 486
#define DMP_ORIENT 488
#define DMP_THRSH 490
#define DMP_ENDIANH 492
#define DMP_ENDIANL 494
#define DMP_BLPFNMTCH 496
#define DMP_BLPFNMTCL 498
#define DMP_BLPFNMXH 500
#define DMP_BLPFNMXL 502
#define DMP_BLPFNMYH 504
#define DMP_BLPFNMYL 506
#define DMP_BLPFNMZH 508
#define DMP_BLPFNMZL 510
#ifdef __cplusplus
}
#endif
#endif // DMPMAP_H
2、下面是MPU6500低层通信函数,如I2C读写,直接读写MPU6500寄存器,还有初始化函数
(1) mpu6500_driver.c
#include "mpu6500_driver.h"
#include "delay.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "math_fun.h"
#include "math.h"
u8 MPU_EXTI_flag=0; //MPU6500引脚中断
/* Platform-specific information. Kinda like a boardfile. */
struct platform_data_s {
signed char orientation[9];
};
/* The sensors can be mounted onto the board in any orientation. The mounting
* matrix seen below tells the MPL how to rotate the raw data from the
* driver(s).
* TODO: The following matrices refer to the configuration on internal test
* boards at Invensense. If needed, please modify the matrices to match the
* chip-to-body matrix for your particular set up.
*/
static struct platform_data_s gyro_pdata = {
.orientation = {0, -1, 0,
1, 0, 0,
0, 0, 1}
};
/* Axis Transformation matrix
|r11 r12 r13| |vx| |v'x|
|r21 r22 r23| |vy| = |v'y|
|r31 r32 r33| |vz| |v'z|
v'x = {(r11 * vx) +( r12 * vy) +( r13 * vz)}
v'y = {(r21 * vx) +( r22 * vy) +( r23 * vz)}
v'z = {(r31 * vx) +( r32 * vy) +( r33 * vz)}
*/
void MPU6500_Port_EXIT_Init(void)
{
GPIO_InitTypeDef GPIO_InitStrue;
EXTI_InitTypeDef EXTI_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_14;
GPIO_Init(GPIOB,&GPIO_InitStrue);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
EXTI_InitStrue.EXTI_Line=EXTI_Line14;
EXTI_InitStrue.EXTI_LineCmd=ENABLE;
EXTI_InitStrue.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStrue.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStrue);
NVIC_InitStrue.NVIC_IRQChannel=EXTI15_10_IRQn;
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStrue.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&NVIC_InitStrue);
}
void MPU6500_I2C_PORT_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12|GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13);
}
void MPU6500_I2C_delay(void)
{
u16 i;
/*
下面的时间是通过逻辑分析仪测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for(i=0;i<5;i++);
}
void MPU6500_I2C_start(void)
{
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetOut_Mode();
MPU6500_I2C_SDA_WR=1;
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
MPU6500_I2C_SDA_WR=0;
MPU6500_I2C_SCL=0;
MPU6500_I2C_delay();
}
void MPU6500_I2C_stop(void)
{
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetOut_Mode();
MPU6500_I2C_SDA_WR=0;
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
MPU6500_I2C_SDA_WR=1;
MPU6500_I2C_delay();
}
u8 MPU6500_I2C_check_ack(void)
{
u16 delay_count=0;
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetIn_Mode();
MPU6500_I2C_SDA_WR=1;
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
while( MPU6500_I2C_SDA_RE )
{
delay_count++;
if(delay_count>0x0fff)
{
MPU6500_I2C_stop();
return 1;
}
}
MPU6500_I2C_SCL=0;
MPU6500_I2C_delay();
return 0;
}
void MPU6500_I2C_ack(void)
{
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetOut_Mode();
MPU6500_I2C_SDA_WR=0;
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
MPU6500_I2C_SCL=0;
MPU6500_I2C_delay();
MPU6500_I2C_SDA_WR=1;
}
void MPU6500_I2C_NoAck(void)
{
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetOut_Mode();
MPU6500_I2C_SDA_WR=1;
MPU6500_I2C_delay();
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
MPU6500_I2C_SCL=0;
MPU6500_I2C_delay();
}
void MPU6500_I2C_write_char(u8 dat)
{
u8 i=0;
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetOut_Mode();
for(i=0;i<8;i++)
{
if(dat&0x80) MPU6500_I2C_SDA_WR=1;
else MPU6500_I2C_SDA_WR=0;
MPU6500_I2C_delay();
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
MPU6500_I2C_SCL=0;
dat<<=1;
}
}
u8 MPU6500_I2C_read_char(void)
{
u8 i=0,dat=0;
MPU6500_I2C_SCL=0;
MPU6500_I2C_SetIn_Mode();
for(i=0;i<8;i++)
{
dat<<=1;
MPU6500_I2C_SCL=1;
MPU6500_I2C_delay();
if(MPU6500_I2C_SDA_RE) dat|=0x01;
MPU6500_I2C_SCL=0;
MPU6500_I2C_delay();
}
return dat;
}
u8 MPU6500_write_byte(u8 reg,u8 data)
{
MPU6500_I2C_start();
MPU6500_I2C_write_char(MPU6500_device_addr<<1 | 0x00);
if(MPU6500_I2C_check_ack())
{
MPU6500_I2C_stop();
return 2;
}
MPU6500_I2C_write_char(reg);
MPU6500_I2C_check_ack();
MPU6500_I2C_write_char(data);
MPU6500_I2C_check_ack();
MPU6500_I2C_stop();
return 0;
}
u8 MPU6500_read_byte(u8 reg)
{
u8 data=0;
MPU6500_I2C_start();
MPU6500_I2C_write_char(MPU6500_device_addr<<1 | 0x00);
if(MPU6500_I2C_check_ack())
{
MPU6500_I2C_stop();
return 2;
}
MPU6500_I2C_write_char(reg);
MPU6500_I2C_check_ack();
MPU6500_I2C_start();
MPU6500_I2C_write_char(MPU6500_device_addr<<1 | 0x01);
MPU6500_I2C_check_ack();
data=MPU6500_I2C_read_char();
MPU6500_I2C_ack();
MPU6500_I2C_stop();
return data;
}
u8 MPU6500_Read_Len(u8 DeviceAddr,u8 RegAddr,u8 len,u8 *pbuff)
{
u8 i;
MPU6500_I2C_start();
MPU6500_I2C_write_char(DeviceAddr<<1 | 0x00 );
if(MPU6500_I2C_check_ack())
{
MPU6500_I2C_stop();
return 2;
}
MPU6500_I2C_write_char(RegAddr);
MPU6500_I2C_check_ack();
MPU6500_I2C_start();
MPU6500_I2C_write_char(DeviceAddr<<1 | 0x01);
MPU6500_I2C_check_ack();
for(i=0;i<len;i++)
{
*pbuff++ =MPU6500_I2C_read_char();
if(i+1>=len) {MPU6500_I2C_NoAck(); break;}
MPU6500_I2C_ack();
}
MPU6500_I2C_stop();
return 0;
}
u8 MPU6500_Write_Len(u8 DeviceAddr,u8 RegAddr,u8 len,u8 *pbuff)
{
u8 i;
MPU6500_I2C_start();
MPU6500_I2C_write_char(DeviceAddr<<1 | 0x00);
if(MPU6500_I2C_check_ack())
{
MPU6500_I2C_stop();
return 2;
}
MPU6500_I2C_write_char(RegAddr);
MPU6500_I2C_check_ack();
for(i=0;i<len;i++)
{
MPU6500_I2C_write_char(*pbuff++);
if(MPU6500_I2C_check_ack())
{
MPU6500_I2C_stop();
return 3;
}
}
MPU6500_I2C_stop();
return 0;
}
u8 InitMPU6050(void)
{
int i=0,j=0;
u8 res=0;
MPU6500_I2C_PORT_Init();
//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错
for(i=0;i<1000;i++)
{
for(j=0;j<1000;j++)
{
;
}
}
MPU6500_write_byte(PWR_MGMT_1,0x80);//复位MPU6050
Delay_ms(100);
MPU6500_write_byte(PWR_MGMT_1,0);唤醒MPU6050
MPU6500_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU6500_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU6500_Set_Rate(50); //设置采样率50Hz
MPU6500_write_byte(INT_EN_REG,0X00); //关闭所有中断
MPU6500_write_byte(USER_CTRL_REG,0X00); //I2C主模式关闭
MPU6500_write_byte(FIFO_EN_REG,0X00); //关闭FIFO
MPU6500_write_byte(INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU6500_read_byte(WHO_AM_I);
if(res==MPU6500_ID)
{
MPU6500_write_byte(PWR_MGMT_1,0X01); //设置CLKSEL,PLL X轴为参考
MPU6500_write_byte(PWR_MGMT_2,0X00); //加速度与陀螺仪都工作
MPU6500_Set_Rate(50); //设置采样率为50Hz
}
else return 1;
/*
temp=0x080;
MPU6500_Write_Len(MPU6500_device_addr,PWR_MGMT_1,1, &temp); //解除休眠状态
temp=0x00;
MPU6500_Write_Len(MPU6500_device_addr,PWR_MGMT_1,1, &temp); //解除休眠状态
MPU6500_Write_Len(MPU6500_device_addr,SMPLRT_DIV,1, &temp);
temp=0x06;
MPU6500_Write_Len(MPU6500_device_addr,CONFIG, 1,&temp);
temp=0x00;
MPU6500_Write_Len(MPU6500_device_addr,ACCEL_CONFIG,1, &temp);
temp=0x18;
MPU6500_Write_Len(MPU6500_device_addr,GYRO_CONFIG,1, &temp);
*/
return 0;
}
short GetData(u8 REG_Address)
{
u8 buff[2];
MPU6500_Read_Len(MPU6500_device_addr,REG_Address,2,buff);
return ((buff[0]<<8)|buff[1]); //合成数据
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU6500_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 result;
u8 acecel[6];
result=MPU6500_Read_Len(MPU6500_device_addr,ACCEL_XOUT_H,6,acecel);
if(result==0)
{
*ax=((u16)acecel[0]<<8)|acecel[1];
*ay=((u16)acecel[2]<<8)|acecel[3];
*az=((u16)acecel[4]<<8)|acecel[5];
}
return result;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU6500_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 result;
u8 gyro[6];
result=MPU6500_Read_Len(MPU6500_device_addr,GYRO_XOUT_H,6,gyro);
if(result==0)
{
*gx=((u16)gyro[0]<<8)|gyro[1];
*gy=((u16)gyro[2]<<8)|gyro[3];
*gz=((u16)gyro[4]<<8)|gyro[5];
}
return result;
}
float MPU6500_GetTemperature(void)
{
short temp;
float dat;
temp=GetData(TEMP_OUT_H);
dat=((double) (temp-21)/333.87)+21;
return dat;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
u8 MPU6500_Set_Gyro_Fsr(u8 fsr)
{
return MPU6500_write_byte(GYRO_CONFIG,fsr<<3);//设置陀螺仪满量程范围
}
//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
u8 MPU6500_Set_Accel_Fsr(u8 fsr)
{
return MPU6500_write_byte(ACCEL_CONFIG,fsr<<3);//设置加速度传感器满量程范围
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU6500_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU6500_write_byte(SMPLRT_DIV,data); //设置数字低通滤波器
return MPU6500_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU6500_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU6500_write_byte(CONFIG,data);//设置数字低通滤波器
}
//MPU6050自测试
//返回值:0,正常
// 其他,失败
u8 MPU6500_run_self_test(void)
{
int result;
//char test_packet[4] = {0};
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);
if (result == 0x07)
{
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
float gyro_sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&gyro_sens);
gyro[0] = (long)(gyro[0] * gyro_sens);
gyro[1] = (long)(gyro[1] * gyro_sens);
gyro[2] = (long)(gyro[2] * gyro_sens);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel);
return 0;
}else return 1;
}
u8 MPU6500_DMP_Init(void)
{
struct int_param_s int_param;
int result;
result=mpu_init(&int_param);
if(result) return 1;
result=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器
if(result) return 2;
result=mpu_configure_fifo(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置FIFO
if(result) return 3;
result=mpu_set_sample_rate(DEFAULT_MPU_HZ);//设置采样率
if(result) return 4;
result=dmp_load_motion_driver_firmware();//加载dmp固件
if(result) return 5;
result=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_pdata.orientation));//设置陀螺仪方向
if(result) return 6;
result=dmp_enable_feature(DMP_FEATURE_TAP|DMP_FEATURE_ANDROID_ORIENT|
DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_GYRO_CAL|
DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_RAW_GYRO);//设置dmp功能
if(result) return 7;
result=dmp_set_fifo_rate(DEFAULT_MPU_HZ);//设置DMP输出速率(最大不超过200Hz)
if(result) return 8;
result=MPU6500_run_self_test(); //自检
if(result) return 9;
result=mpu_set_dmp_state(1);//使能DMP
if(result) return 10;
result=dmp_set_interrupt_mode(DMP_INT_CONTINUOUS);//设置中断产生方式
if(result) return 11;
return 0;
}
//得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
//pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
//roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失败
u8 MPU6500_dmp_get_euler_angle(short *accel,short *gyro,float *pitch,float *roll,float *yaw)
{
//q30格式,long转float时的除数.
#define Q30 ((1<<30)*1.0f)
float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
unsigned long sensor_timestamp;
short sensors;
unsigned char more;
long quat[4];
u8 result=0;
result=dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more);
if(result)return 1;
/* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units.
* This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent.
**/
/*if (sensors & INV_XYZ_GYRO )
send_packet(PACKET_TYPE_GYRO, gyro);
if (sensors & INV_XYZ_ACCEL)
send_packet(PACKET_TYPE_ACCEL, accel); */
/* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30.
* The orientation is set by the scalar passed to dmp_set_orientation during initialization.
**/
if(sensors&INV_WXYZ_QUAT)
{
q0 = quat[0] / Q30; //q30格式转换为浮点数
q1 = quat[1] / Q30;
q2 = quat[2] / Q30;
q3 = quat[3] / Q30;
//计算得到俯仰角/横滚角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
}else return 2;
return 0;
}
(2) mpu6500_driver.h
#ifndef __MPU6500_DRIVER_H
#define __MPU6500_DRIVER_H
#include "stm32f10x.h"
#include "sys.h"
#define MPU6500_I2C_SDA_RE PBin(13)
#define MPU6500_I2C_SDA_WR PBout(13)
#define MPU6500_I2C_SCL PBout(12)
#define MPU6500_I2C_SetOut_Mode() {GPIOB->CRH&=0XFF0FFFFF;GPIOB->CRH|=0X00300000;}
#define MPU6500_I2C_SetIn_Mode() {GPIOB->CRH&=0XFF0FFFFF;GPIOB->CRH|=0X00800000;GPIOB->ODR|=0X01<13;}
#define MPU6500_device_addr 0x68
#define MPU6500_ID 0x70
#define DEFAULT_MPU_HZ 100 //100Hz
//****************************************
// 定义MPU6050内部地址
//****************************************
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)
#define FIFO_EN_REG 0X23 //FIFO使能寄存器
#define INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define INT_EN_REG 0X38 //中断使能寄存器
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define USER_CTRL_REG 0X6A //用户控制寄存器
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define PWR_MGMT_2 0X6C //电源管理寄存器2
#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
#define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取
extern u8 MPU_EXTI_flag;
void MPU6500_Port_EXIT_Init(void);
void MPU6500_I2C_PORT_Init(void);
void MPU6500_I2C_delay(void);
void MPU6500_I2C_start(void);
void MPU6500_I2C_stop(void);
u8 MPU6500_I2C_check_ack(void);
void MPU6500_I2C_ack(void);
void MPU6500_I2C_NoAck(void);
void MPU6500_I2C_write_char(u8 dat);
u8 MPU6500_I2C_read_char(void);
u8 MPU6500_write_byte(u8 reg,u8 data);
u8 MPU6500_read_byte(u8 reg);
u8 MPU6500_Read_Len(u8 DeviceAddr,u8 RegAddr,u8 len,u8 *pbuff);
u8 MPU6500_Write_Len(u8 DeviceAddr,u8 RegAddr,u8 len,u8 *pbuff);
u8 InitMPU6050(void);
short GetData(u8 REG_Address);
u8 MPU6500_Get_Accelerometer(short *ax,short *ay,short *az);
u8 MPU6500_Get_Gyroscope(short *gx,short *gy,short *gz);
float MPU6500_GetTemperature(void);
u8 MPU6500_Set_Gyro_Fsr(u8 fsr);
u8 MPU6500_Set_Accel_Fsr(u8 fsr);
u8 MPU6500_Set_Rate(u16 rate);
u8 MPU6500_Set_LPF(u16 lpf);
u8 MPU6500_run_self_test(void);
u8 MPU6500_DMP_Init(void);
u8 MPU6500_dmp_get_euler_angle(short *accel,short *gyro,float *pitch,float *roll,float *yaw);
#endif
3、接下来是两个关于计算方向矩阵的函数,是从DMP6.12版复制过来的,在DMP库设置设计方向矩阵时调用
(1) math_fun.c
#include "math_fun.h"
/**
*此文件包含计算MPU6XXX方向矩阵的数学计算函数
*
*
*
*
**/
unsigned short inv_row_2_scale(const signed char *row)
{
unsigned short b;
if (row[0] > 0)
b = 0;
else if (row[0] < 0)
b = 4;
else if (row[1] > 0)
b = 1;
else if (row[1] < 0)
b = 5;
else if (row[2] > 0)
b = 2;
else if (row[2] < 0)
b = 6;
else
b = 7; // error
return b;
}
/** Converts an orientation matrix made up of 0,+1,and -1 to a scalar representation.
* @param[in] mtx Orientation matrix to convert to a scalar.
* @return Description of orientation matrix. The lowest 2 bits (0 and 1) represent the column the one is on for the
* first row, with the bit number 2 being the sign. The next 2 bits (3 and 4) represent
* the column the one is on for the second row with bit number 5 being the sign.
* The next 2 bits (6 and 7) represent the column the one is on for the third row with
* bit number 8 being the sign. In binary the identity matrix would therefor be:
* 010_001_000 or 0x88 in hex.
*/
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx)
{
unsigned short scalar;
/*
XYZ 010_001_000 Identity Matrix
XZY 001_010_000
YXZ 010_000_001
YZX 000_010_001
ZXY 001_000_010
ZYX 000_001_010
*/
scalar = inv_row_2_scale(mtx);
scalar |= inv_row_2_scale(mtx + 3) << 3;
scalar |= inv_row_2_scale(mtx + 6) << 6;
return scalar;
}
(2) math_fun.h
#ifndef __MATH_FUN_H
#define __MATH_FUN_H
unsigned short inv_row_2_scale(const signed char *row);
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx);
#endif
4、向上位机“匿名四轴”2.6版发送数据的函数,这些函数的功能是,将加速度,角速度,航向角,俯仰角,横滚角,按照上位机的格式要求,将数据组装后通过串口发送到上位机,格式要求可打开“匿名四轴”2.6版,按F12查看帮助。
(1) send_to_client.c
#include "send_to_client.h"
//串口1发送1个字符
//c:要发送的字符
void usart1_send_char(u8 c)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
USART_SendData(USART1,c);
}
//传送数据给匿名四轴上位机软件(V2.6版本)
//fun:功能字. 0XA0~0XAF
//data:数据缓存区,最多28字节!!
//len:data区有效数据个数
void usart1_niming_report(u8 fun,u8*data,u8 len)
{
u8 send_buf[32];
u8 i;
if(len>28)return; //最多28字节数据
send_buf[len+3]=0; //校验数置零
send_buf[0]=0X88; //帧头
send_buf[1]=fun; //功能字
send_buf[2]=len; //数据长度
for(i=0;i<len;i++)send_buf[3+i]=data[i]; //复制数据
for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //计算校验和
for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //发送数据到串口1
}
//发送加速度传感器数据和陀螺仪数据
//aacx,aacy,aacz:x,y,z三个方向上面的加速度值
//gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值
void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
{
u8 tbuf[12];
tbuf[0]=(aacx>>8)&0XFF;
tbuf[1]=aacx&0XFF;
tbuf[2]=(aacy>>8)&0XFF;
tbuf[3]=aacy&0XFF;
tbuf[4]=(aacz>>8)&0XFF;
tbuf[5]=aacz&0XFF;
tbuf[6]=(gyrox>>8)&0XFF;
tbuf[7]=gyrox&0XFF;
tbuf[8]=(gyroy>>8)&0XFF;
tbuf[9]=gyroy&0XFF;
tbuf[10]=(gyroz>>8)&0XFF;
tbuf[11]=gyroz&0XFF;
usart1_niming_report(0XA1,tbuf,12);//自定义帧,0XA1
}
//通过串口1上报结算后的姿态数据给电脑
//aacx,aacy,aacz:x,y,z三个方向上面的加速度值
//gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值
//roll:横滚角.单位0.01度。 -18000 -> 18000 对应 -180.00 -> 180.00度
//pitch:俯仰角.单位 0.01度。-9000 - 9000 对应 -90.00 -> 90.00 度
//yaw:航向角.单位为0.1度 0 -> 3600 对应 0 -> 360.0度
void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,float roll_f,float pitch_f,float yaw_f)
{
u8 i;
short roll,pitch,yaw;
u8 tbuf[28];
for(i=0;i<28;i++)tbuf[i]=0;//清0
//按上位机格式要求整理数据
roll = (int)(roll_f*100);
pitch = (int)(pitch_f*100);
yaw = (int)(yaw_f*10);
tbuf[0]=(aacx>>8)&0XFF;
tbuf[1]=aacx&0XFF;
tbuf[2]=(aacy>>8)&0XFF;
tbuf[3]=aacy&0XFF;
tbuf[4]=(aacz>>8)&0XFF;
tbuf[5]=aacz&0XFF;
tbuf[6]=(gyrox>>8)&0XFF;
tbuf[7]=gyrox&0XFF;
tbuf[8]=(gyroy>>8)&0XFF;
tbuf[9]=gyroy&0XFF;
tbuf[10]=(gyroz>>8)&0XFF;
tbuf[11]=gyroz&0XFF;
tbuf[18]=(roll>>8)&0XFF;
tbuf[19]=roll&0XFF;
tbuf[20]=(pitch>>8)&0XFF;
tbuf[21]=pitch&0XFF;
tbuf[22]=(yaw>>8)&0XFF;
tbuf[23]=yaw&0XFF;
usart1_niming_report(0XAF,tbuf,28);//飞控显示帧,0XAF
}
(2) send_to_client.h
#ifndef __SEND_TO_CLIENT_H
#define __SEND_TO_CLIENT_H
#include "stm32f10x.h"
#include "sys.h"
void usart1_send_char(u8 c);
void usart1_niming_report(u8 fun,u8*data,u8 len);
void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz);
void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,float roll_f,float pitch_f,float yaw_f);
#endif
5、最后是主函数调用 main.c
#include "stm32f10x.h"
#include "variable.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include "timer.h"
#include "mpu6500_driver.h"
#include "send_to_client.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "inv_mpu.h"
#include "lcd_driver.h"
#define USART1_Bound 115200
#define save_mpu6500_key 0xaa55
#define save_mpu6500_addr 98
// unsigned long sensor_timestamp;
// short gyro[3], accel[3], sensors;
// unsigned char more;
// long quat[4];
u8 buffer[100];
long MPU_buffer[100];
int main(void)
{
u8 temp,result;
float pitch,roll,yaw;
short accel[3],gyro[3];
float temperature;
// unsigned long timestamp;
unsigned long walk_count;
unsigned long walk_time;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
LED_Init();
Key_Init();
MY_USART1_Init(USART1_Bound);
Timer2_Init(1000-1,72-1);//set timer frequent:1000KHz T=1us
LCD_Init();
LCD_Clear(WHITE);
MPU6500_Port_EXIT_Init();
if(InitMPU6050()) printf("InitMPU6050 error\r\n");
if(MPU6500_DMP_Init()) printf("MPU6500_DMP_Init error :%d \r\n",result);
LCD_ShowString(10,20,100,16,16,(u8*)"MPU6500 TEST");
MPU6500_Read_Len(MPU6500_device_addr,WHO_AM_I,1,&temp);
sprintf((char*)buffer,"MPU6500 ID:0X%x",temp);
LCD_ShowString(10,50,200,16,16,buffer);
while(1)
{
if(MPU_EXTI_flag)
{
MPU_EXTI_flag=0;
LED_D5=!LED_D5;
result=MPU6500_dmp_get_euler_angle(accel,gyro,&pitch,&roll,&yaw);//获得各角数据
if(result==0)
{
mpu6050_send_data(accel[0],accel[1],accel[2],gyro[0],gyro[1],gyro[2]);//将数据发到上位机
usart1_report_imu(accel[0],accel[1],accel[2],gyro[0],gyro[1],gyro[2],(roll),(pitch),(yaw));
}
}
if(Timer2_flag_100ms)
{
Timer2_flag_100ms=0;
sprintf((char*)buffer,"yaw:%5.1f",yaw);
LCD_ShowString(10,70,100,16,16,buffer);
sprintf((char*)buffer,"pitch:%5.1f",pitch);
LCD_ShowString(10,90,100,16,16,buffer);
sprintf((char*)buffer,"roll:%5.1f",roll);
LCD_ShowString(10,110,100,16,16,buffer);
}
if(Timer2_flag_1s&LED_Time_flag_MaskBit)
{
Timer2_flag_1s&=~LED_Time_flag_MaskBit;
LED_D4=!LED_D4;
dmp_get_pedometer_step_count(&walk_count);//计步器
dmp_get_pedometer_walk_time(&walk_time);
temperature=MPU6500_GetTemperature();//内部温度
sprintf((char*)buffer,"step:%d walk_time:%d",walk_count,walk_time);
LCD_ShowString(10,130,240,16,16,buffer);
sprintf((char*)buffer,"T:%5.1f",temperature);
LCD_ShowString(10,150,240,16,16,buffer);
}
/*
if(USART1_Receive_T_flag&0x01)
{
USART_DMACmd(USART1,USART_DMAReq_Tx,ENABLE);
DMA_Cmd(DMA1_Channel4,ENABLE);
USART1_Receive_T_flag&=~0x01;
}
if(DMA_TransferComplete_Flag&0x01)
{
LED_D4=0;
DMA_TransferComplete_Flag&=~0x01;
}
*/
}
}

















 774
774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









