







一、简介
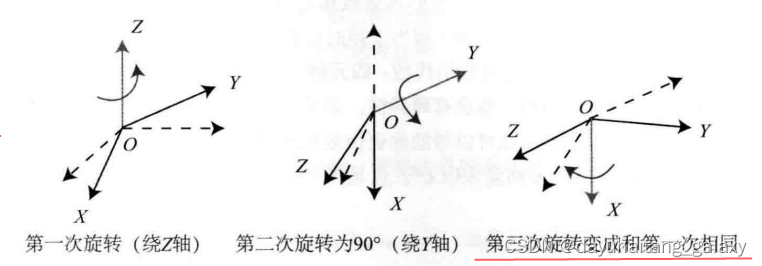
欧拉角的一个很大的问题在于其存在
万向锁,即在俯仰角为士90°时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由3次旋转变成了2次旋转,如下图所示)。这被称为奇异性问题,在其他形式的欧拉角中也同样存在这一问题。理论上可以证明,只要想用3个实数来表达三维旋转,都会不可避免地碰到奇异性问题。
为了解决这一问题,就需要使用到
四元数的概念了。本质上四元数有点类似于复数集的规则范畴,在复数中其乘法表示复平面上的某种旋转,如二维复平面中,乘以复数i相当于逆时针把一个复向量旋转90度。四元数与之类似,但略有区别,假设有一个空间三维点 P ( x , y , z ) P(x,y,z)

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 477
477











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











