







 本文介绍了欧拉角的概念,包括Yaw、Pitch、Roll,并详细阐述了四元数的定义。接着,文章讨论了如何从欧拉角转换为四元数,以及从四元数转换回欧拉角,强调了在转换过程中atan2的重要性。最后,提到了在不同坐标系下进行转换的注意事项,并提供了参考文献和示例代码。
本文介绍了欧拉角的概念,包括Yaw、Pitch、Roll,并详细阐述了四元数的定义。接着,文章讨论了如何从欧拉角转换为四元数,以及从四元数转换回欧拉角,强调了在转换过程中atan2的重要性。最后,提到了在不同坐标系下进行转换的注意事项,并提供了参考文献和示例代码。
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系:
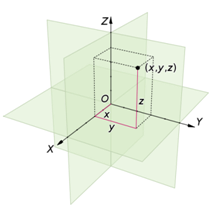
图1 3D Cartesian coordinate System (from wikipedia)
定义 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
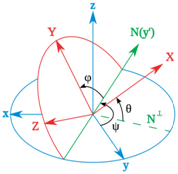
图2 Tait-Bryan angles (from wikipedia)
一、四元数的定义
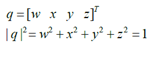
通过旋转轴和绕该轴旋转的角度可以构造一个四元数:
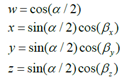
其中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3726
3726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









