







一. 下载地址:
Robotics Toolbox - Peter Corke
在matlab中打开安装包:RTB.mltbx 将自动下载
注:最好下载R2021a或以上的最新版,R2016a示教会报错。
二. 基本命令和常用函数:
在命令行窗口输入rtbdemo 可打开自带的demo
>> rtbdemo输入doc rotx,可查看旋转矩阵matrix函数的文档。旋转矩阵R=rotx(arg)中要填角度而不是弧度。
>> doc rotx1.旋转——旋转矩阵
rotx(), roty(), rotz(),给定一个旋转角度就可得到一个旋转矩阵。
r = rotx(90)
%输出结果为
r =
1 0 0
0 0 -1
0 1 0eul2r() 为由欧拉角得到一个旋转矩阵,tr2eul() 为由旋转矩阵得欧拉角
r1 = eul2r(90,60,30) %分别对应于绕自身坐标系Z、Y、Z轴的旋转。
输出结果为
r =
-0.5000 -0.8660 0
0.4330 -0.2500 0.8660
-0.7500 0.4330 0.5000
%等价于r1 = rotz(90)*roty(60)*rotz(30),旋转矩阵的右乘rpy2r() 为由横滚-俯仰-偏航角得到旋转矩阵,tr2rpy() 为由旋转矩阵得到横滚-俯仰-偏航角
r2 = rpy2r(90,60,30) %分别绕固定坐标系的XYZ旋转
输出结果为
r2 =
0.4330 0.7500 0.5000
0.2500 0.4330 -0.8660
-0.8660 0.5000 0
%等价于 r2 = rotz(30)*roty(60)*rotx(90) 旋转矩阵的左乘2.旋转——变换矩阵
trotx(), troty(), trotz(),给定一个旋转角度就可得到一个变换矩阵。
t = trotx(90)
%输出结果为
t =
1 0 0 0
0 0 -1 0
0 1 0 0
0 0 0 1eul2tr() ,tr2eul() rpy2tr() ,tr2rpy() 与上相似
3.位移加旋转——变换矩阵,旋转矩阵——变换矩阵
T = transl(1.5,1,0.5)*trotx(30)*trotz(60);
P = transl(T);
R = t2r(T);
输出结果为
T =
0.5000 -0.8660 0 1.5000
0.7500 0.4330 -0.5000 1.0000
0.4330 0.2500 0.8660 0.5000
0 0 0 1.0000 %最右一列为为一体,左上角3×3为旋转矩阵
P =
1.5000
1.0000
0.5000 %位移
R =
0.5000 -0.8660 0
0.7500 0.4330 -0.5000
0.4330 0.2500 0.8660 %旋转矩阵三.Link类
类属性和类方法的详细介绍引用 http://t.csdn.cn/NP1N5
‘ revolute ‘为旋转关节,’d‘为连杆偏移量,’a'为连杆长度,‘alpha’为连杆扭角。
L = Link('revolute','d','0.216','a',0,'alpha',pi/2);串联机械臂要用到SerialLink,SerialLink.teach为示教函数。
bot = SerialLink(L, 'name', '5-dof') %将SerialLink赋值,定义给bot变量
bot.teach %示教SerialLink.plot动画,可给定一个m*n的矩阵,n为机械臂所含关节个数
q = [0 0 0 0 0]; 1*n
bot.plot(q); 五个关节都是初始位置
若给定m*n矩阵,则运行结果为一个动画SerialLink.fkine正向运动学, 给一个关节变量,可以求出变换矩阵
q0 = [pi/2 pi/2 0 0 0]; %5关节机器人的关节变量
T = bot.fkine(q0);
输出结果为
T =
0 1 0 0
-1 0 0 -0.645
0 0 1 1.181
0 0 0 1SerialLink.ikine和SerialLink.ikunc逆向运动学,给变换矩阵,不考虑关节限制求关节变量
q1 = bot.ikine(T,'mask',[1 1 1 1 1 0]); %当关节数量小于6时,要用mask向量
q2 = bot.ikunc(T); %不需考虑
输出结果(1.5708为pi/2)
q1 =
1.5708 1.5708 -0.0000 0.0000 0
q2 =
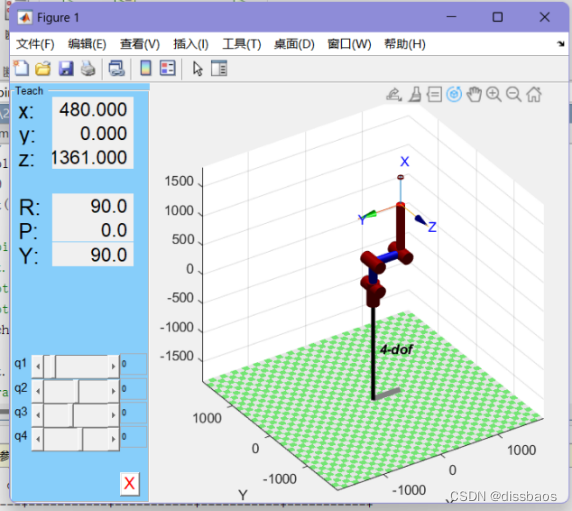
1.5708 1.5708 0.0000 0.0000 -0.0000四.建立一个简单四关节机器人
建立一个只在xoz平面运动的四关节机器人。其中Link.qlim给关节增加限制,让第一关节锁死。
clear;
clc;
L(1) = Link('standard','d', 100, 'a', 0, 'alpha', pi/2,'offset',0,'qlim',[0,0]/180*pi);
L(2) = Link('revolute','d', 0, 'a', 420, 'alpha', 0,'offset',pi/2,'qlim',[-90,90]/180*pi);
L(3) = Link('revolute','d', 0, 'a', 480, 'alpha', 0,'offset',-pi/2,'qlim',[-90,130]/180*pi);
L(4) = Link('revolute','d', 0, 'a', 840, 'alpha', 0,'offset',pi/2,'qlim',[-120,90]/180*pi);
bot = SerialLink(L, 'name', '4-dof'); %
bot.base = transl(0,0,1); %世界坐标系定为(0,0,1)
bot.display(); %可查看D-H参数
q = [0 0 0 0]; %初始关节角为0
bot.plot(q); %SerialLink.plot动画,可给定一个m*n的矩阵,n为机械臂所含关节个数
bot.teach %示教
输出结果为:
bot =
4-dof:: 4 axis, RRRR, stdDH, slowRNE
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 100| 0| 1.5708| 0|
| 2| q2| 0| 420| 0| 1.5708|
| 3| q3| 0| 480| 0| -1.5708|
| 4| q4| 0| 840| 0| 1.5708|
+---+-----------+-----------+-----------+-----------+-----------+
base: t = (0, 0, 1), RPY/xyz = (0, 0, 0) deg 运行结果如图
接下来我们让它动个位置。
T1 = bot.fkine(q); %初始位置
T2 = transl(0,0,1840); %变换位置
q1 = bot.ikunc(T1);
q2 = bot.ikunc(T2);
pause %按下空格后继续运行
bot.plot(q1);
pause
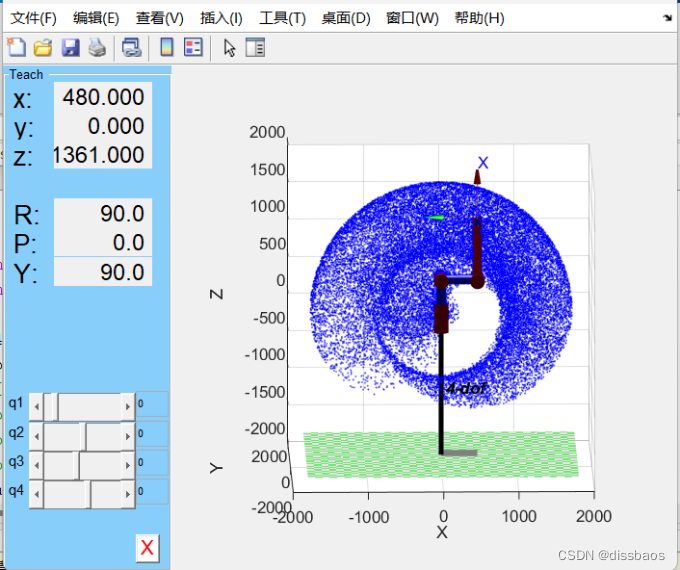
bot.plot(q2);五.工作空间可视化
在之前的代码中添加以下代码,利用rand随机绘制30000个点。
num = 30000;
p = zeros(num,3);%先声明0矩阵可加快运行速度
for i=1:num
q1 = L(1).qlim(1) + rand * (L(1).qlim(2) - L(1).qlim(1));
q2 = L(2).qlim(1) + rand * (L(2).qlim(2) - L(2).qlim(1));
q3 = L(3).qlim(1) + rand * (L(3).qlim(2) - L(3).qlim(1));
q4 = L(4).qlim(1) + rand * (L(4).qlim(2) - L(4).qlim(1));
q = [q1 q2 q3 q4];
T = bot.fkine(q); % SerialLink.fkine正向运动学, 给一个关节变量,可以求出变换矩阵
P(i,:) = transl(T);
end
plot3( P(:,1), P(:,2), P(:,3),'b.','markersize',1); %在三维空间内绘制30000个点
hold on; %添加新绘图的时候保留当前绘图
grid on; %在画图的时候添加网格线
view([45 45]);
bot.plot([0 0 0 0]);运行结果如图:
六.轨迹规划
从当前位置移动到(0,0,1841),用末端执行器位置来规划会出现一些bug,采用关节角较为简单,关节角为[0,0,pi/2,-pi/2]。
T1 = [0,0,0,0];
T2 = [0,0,pi/2,-pi/2];
step = 50; %插入50个值
[q,qd,qdd] = jtraj(T1,T2,step); %五次多多项式关节空间轨迹规划
bot.plot(q,'trail','b'); %运行后在命令行窗口再复制运行一次,trail轨迹,b蓝色 轨迹运行结果如图。引用链接http://t.csdn.cn/Wi0ce















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









