









需求
需要在无人艇上添加海康威视的实时摄像头。
- 本地IP192.168.0.100 摄像头IP 192.168.0.64 用户名admin 密码nanfoon51077533 端口8000
- 海康配置可在文件中更改。
- 摄像头添加在BoatStatus页的右侧地图模块的右上角。
- 通过一个按钮来控制摄像头的开启和关闭。
- 图像双击后弹出独立窗口。
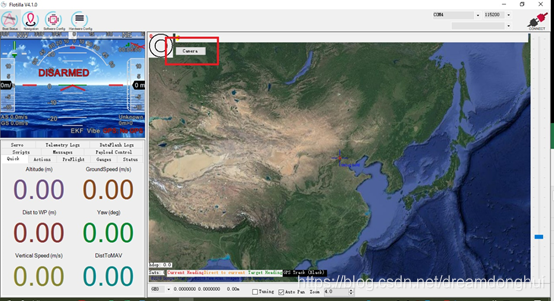
摄像头未开启时的效果图:
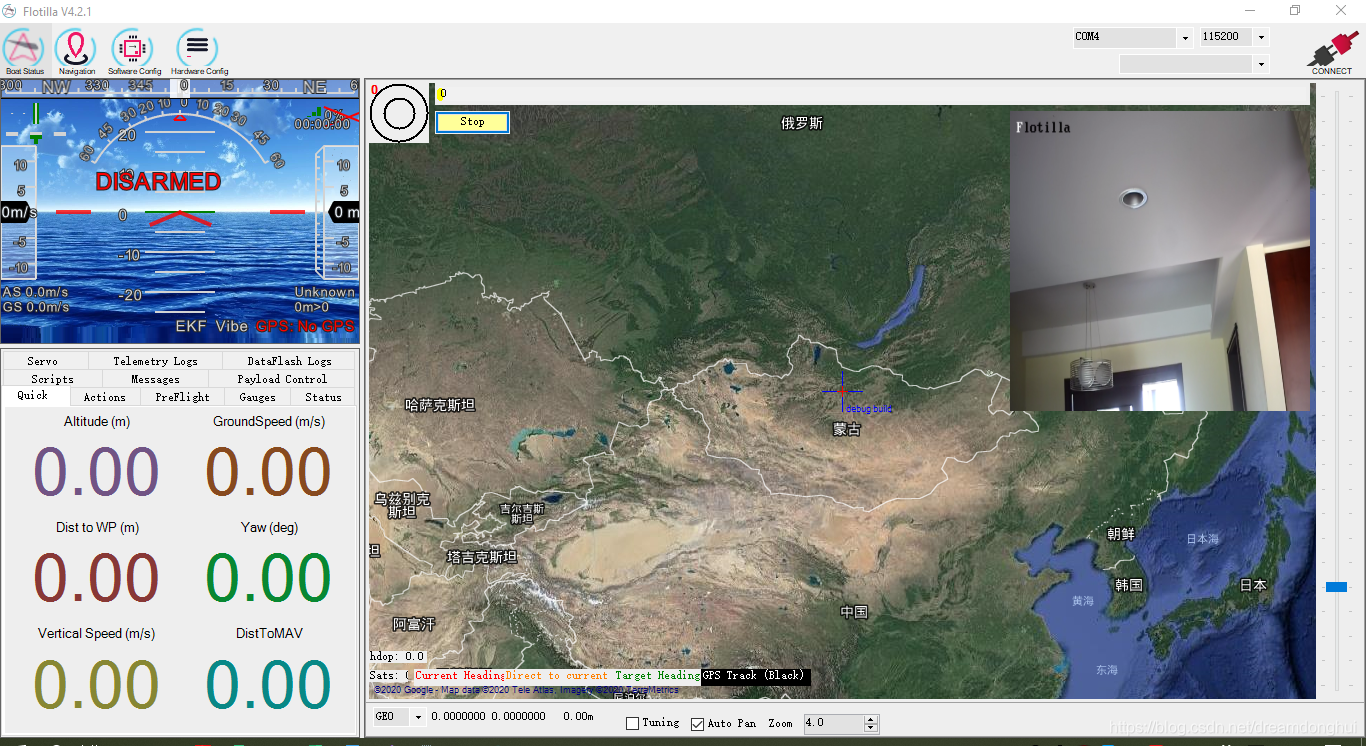
摄像头开启后的效果图: 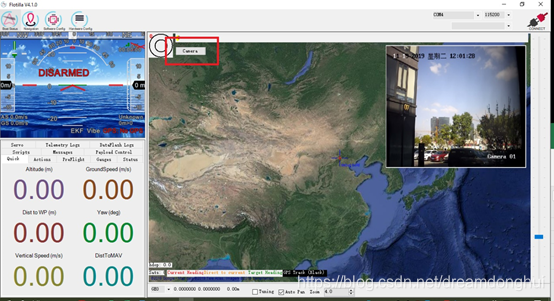
弹出后的独立窗口示意图: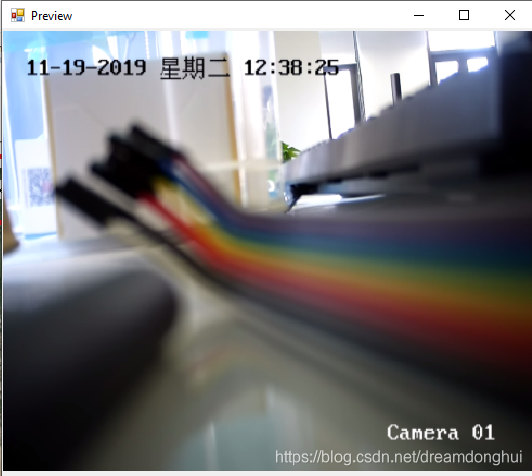
实现
1. 添加按钮
地图页在MissionPlanner项目下面的GCSViews文件夹里面的FlightData.cs里面。如下图: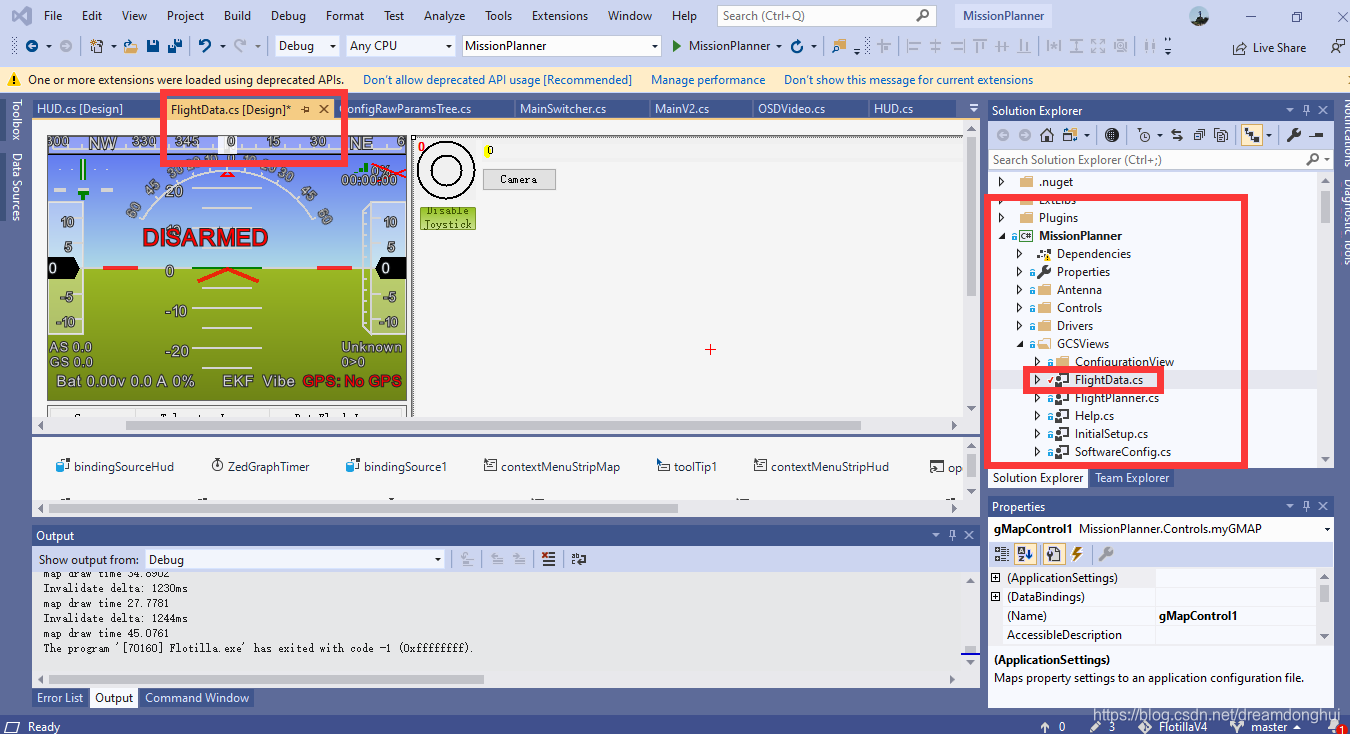
从toolbox里面找到Button,拖至地图位置,并将其text属性更改。如图所示: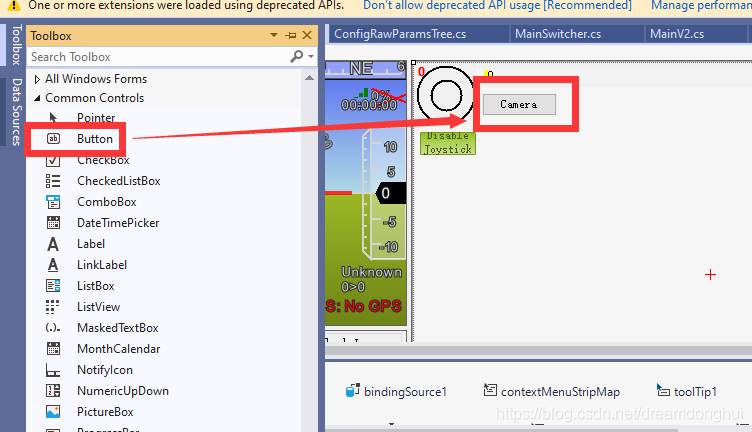
2. 更改海康威视参数
因为公司海康威视通用同一个配置参数,先要更改设备参数。进入海康威视的配置软件: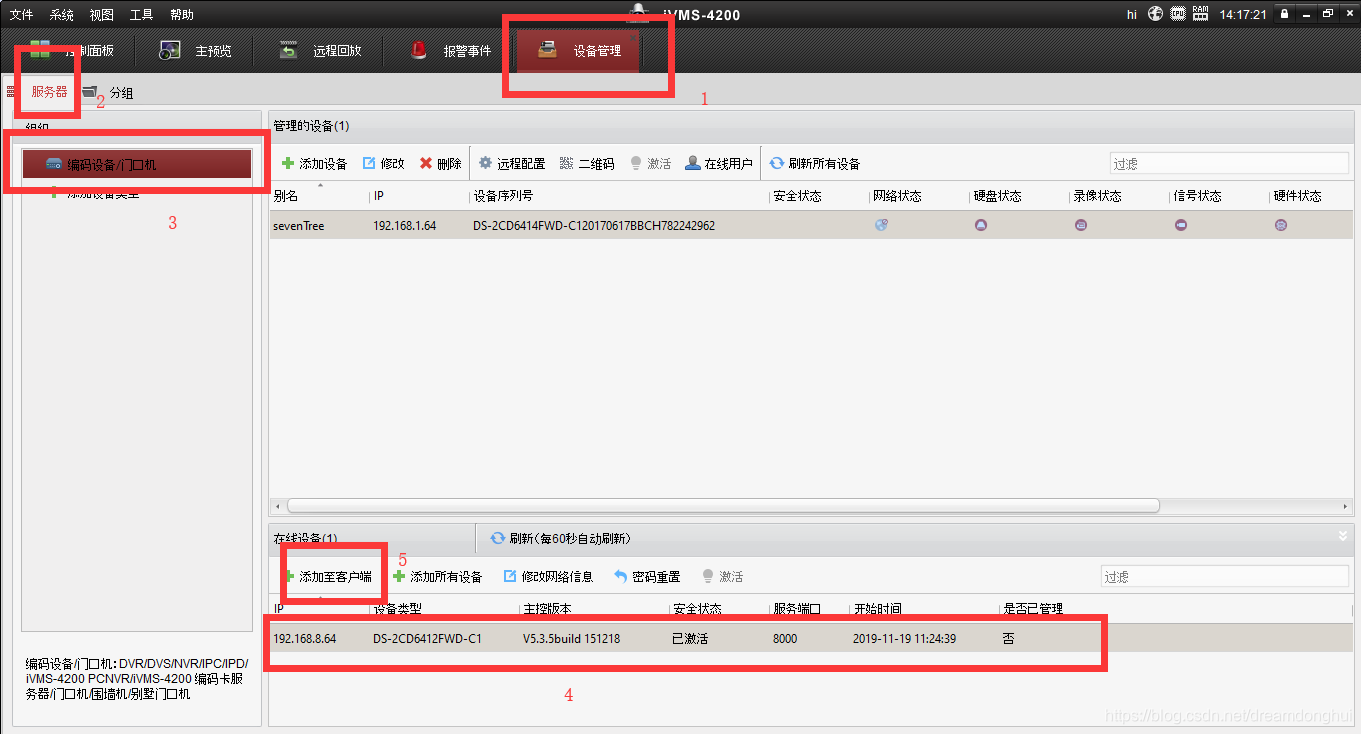
点击添加至客户端后会弹出下面的窗口,输入原参数,起一个别名,点击添加。
选中刚才添加的设备,点击远程配置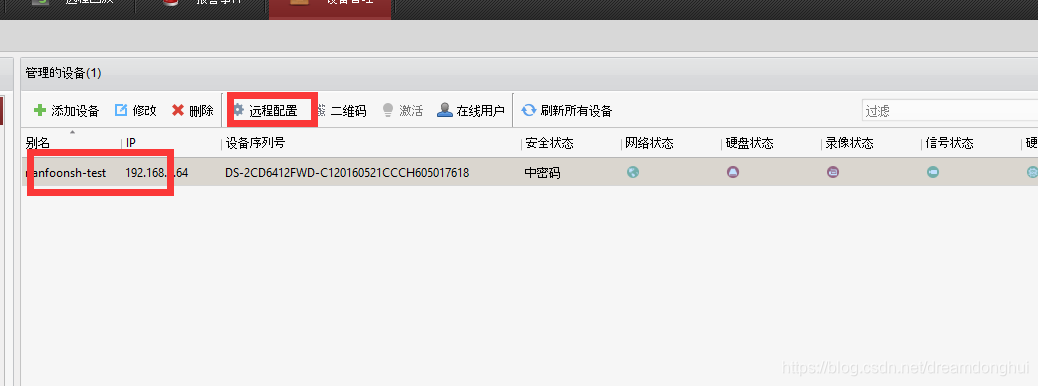

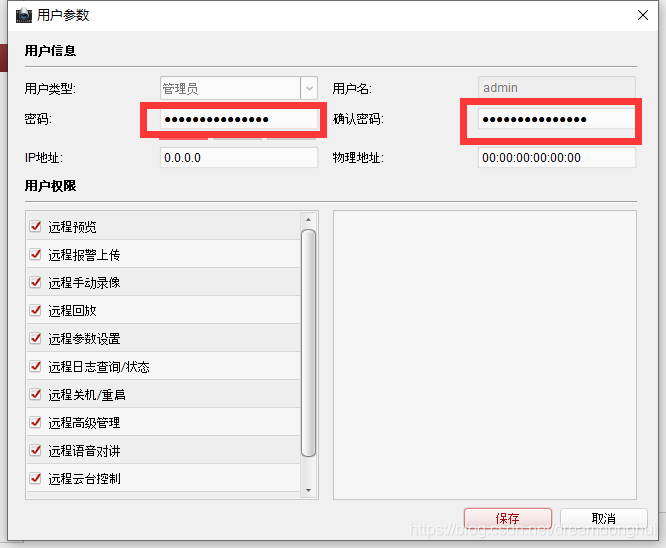
生效后不要忘记更改本地计算机的IP地址。再次进入远程配置,更改密码

顺带把OSD显示改下: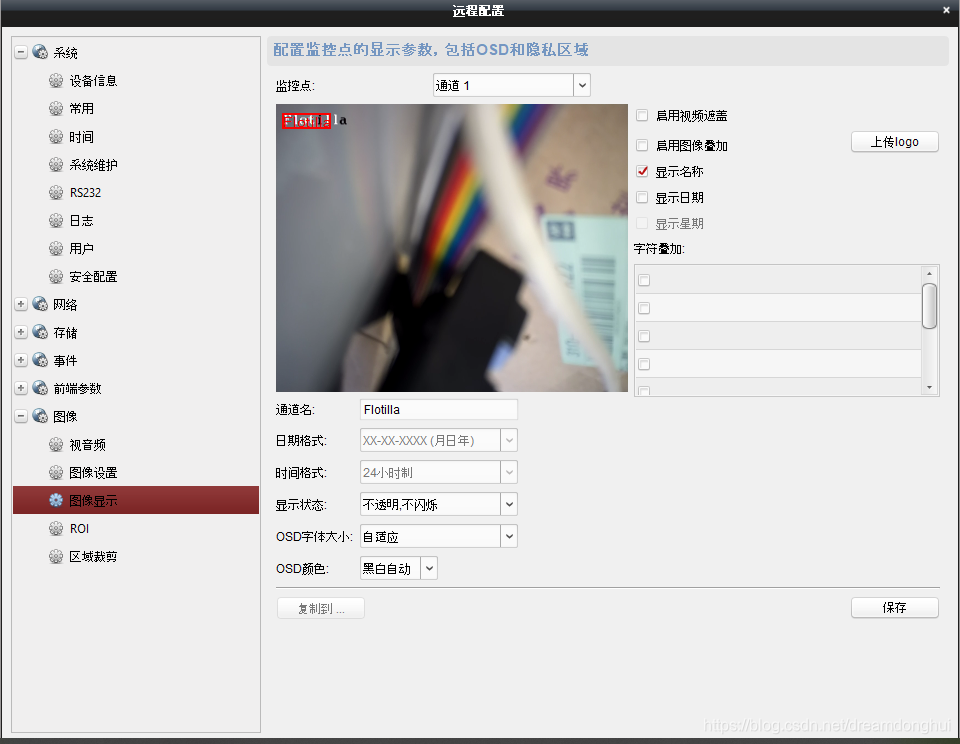
3. 添加视频窗口
在toolbox里面找到pictureBox拖入地图右上侧。并将其visible属性改为false,size改为300,300.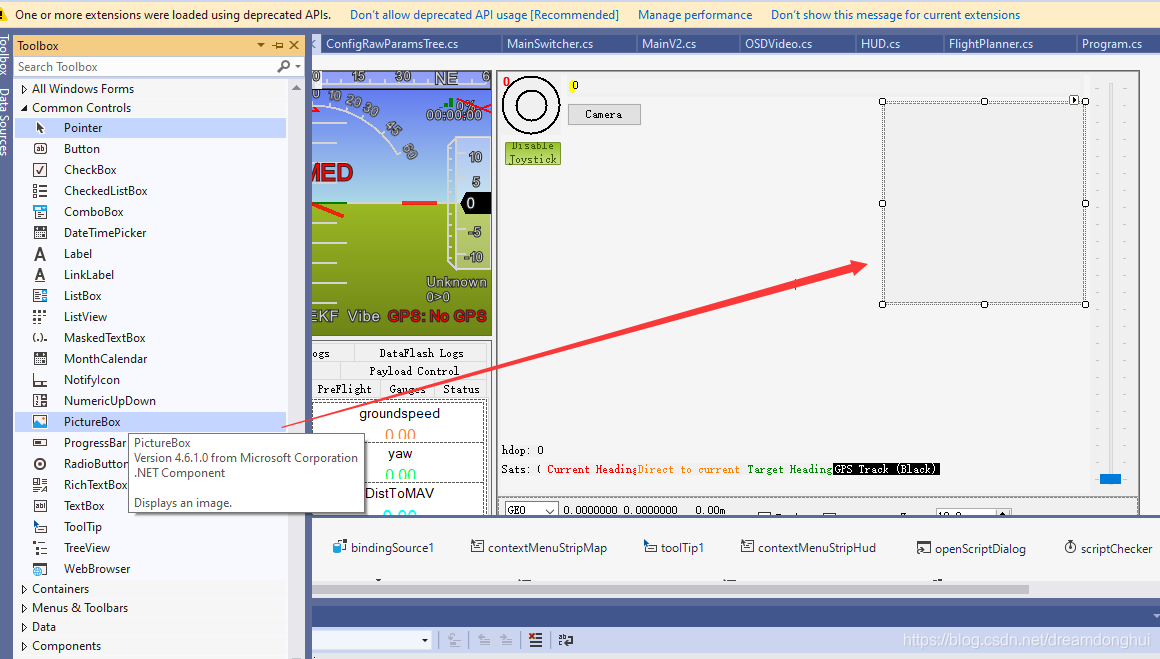
4. 添加视频代码
双击Camera按键进入点击事件代码块。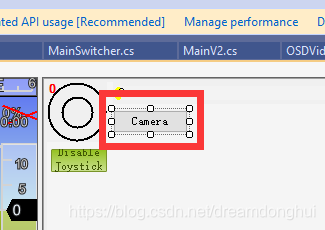

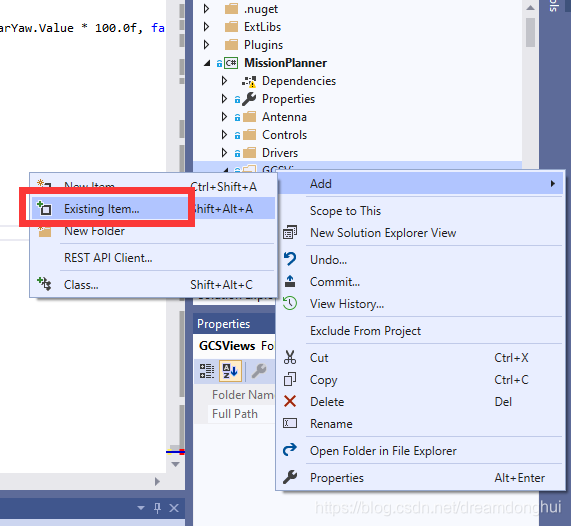
设备网络SDK开发包(64bit)【库文件】里的HCNetSDK.dll、HCCore.dll、HCNetSDKCom文件夹、PlayCtrl.dll、SuperRender.dll、AudioRender.dll、ssleay32.dll、libeay32.dll等文件均拷贝放置在新建的bin文件夹里,将bin文件夹放置在Debug目录下。本例中 C:\Users\lenovo\Documents\Visual Studio 2017\Projects\FlotillaV4\FlotillaV4\bin\Debug
将海康实时预览示例代码一\PreviewDemo文件夹里的CHCNetSDK.cs复制到FlightData.cs相同文件夹下。右击将其添加如当前project。
双击打开,将第三行的namespace更改,如下:
namespace PreviewDemo
改为
namespace MissionPlanner.GCSViews
更改后导入进去的CHCNetSDK.cs文件可被FlightData.cs识别。
在新增的按键点击事件代码块添加以下代码:
//HikVision Camera
private bool m_bInitSDK = false;
private void ButtonCameraSwitch_Click(object sender, EventArgs e)
{
m_bInitSDK = CHCNetSDK.NET_DVR_Init();
if (m_bInitSDK == false)
{
MessageBox.Show("NET_DVR_Init error!");
return;
}
else
{
//保存SDK日志 To save the SDK log
CHCNetSDK.NET_DVR_SetLogToFile(3, "C:\\SdkLog\\", true);
}
}
添加完成后点击调试,启动调式运行,程序启动后点击按键,如无报错,说明添加进去的模块运行正常。继续编写。
在按键单击函数下方添加海康威视的资源释放函数,如下所示(添加后会提示重名或者变量未定义的错误,根据提示修改下就可以):
//HikVision Camera
private bool m_bInitSDK = false;
private Int32 m_lRealHandle = -1;
private Int32 m_lUserID = -1;
private void ButtonCameraSwitch_Click(object sender, EventArgs e)
{
m_bInitSDK = CHCNetSDK.NET_DVR_Init();
if (m_bInitSDK == false)
{
MessageBox.Show("NET_DVR_Init error!");
return;
}
else
{
//保存SDK日志 To save the SDK log
CHCNetSDK.NET_DVR_SetLogToFile(3, "C:\\SdkLog\\", true);
}
}
/// <summary>
/// 清理所有正在使用的资源。
/// </summary>
protected void HikDispose(bool disposing)
{
if (m_lRealHandle >= 0)
{
CHCNetSDK.NET_DVR_StopRealPlay(m_lRealHandle);
}
if (m_lUserID >= 0)
{
CHCNetSDK.NET_DVR_Logout(m_lUserID);
}
if (m_bInitSDK == true)
{
CHCNetSDK.NET_DVR_Cleanup();
}
if (disposing)
{
if (components != null)
{
components.Dispose();
}
}
base.Dispose(disposing);
}
相同的方法添加更改所需代码,为了灵活变换显示区域,对preview代码块做了传递函数的更改,将picturebox作为传递变量改进去。代码块更改完后如下:
//HikVision Camera
private bool m_bInitSDK = false;
private Int32 m_lRealHandle = -1;
private Int32 m_lUserID = -1;
private uint iLastErr = 0;
private string str;
CHCNetSDK.REALDATACALLBACK RealData = null;
private void ButtonCameraSwitch_Click(object sender, EventArgs e)
{
m_bInitSDK = CHCNetSDK.NET_DVR_Init();
if (m_bInitSDK == false)
{
MessageBox.Show("NET_DVR_Init error!");
return;
}
else
{
//保存SDK日志 To save the SDK log
CHCNetSDK.NET_DVR_SetLogToFile(3, "C:\\SdkLog\\", true);
}
if (m_lUserID < 0)
{//Open
HikLogin();
HikPreview(PictureBoxHikVisionCameraOnMap);
}
else
{//Close
HikPreview(PictureBoxHikVisionCameraOnMap);
HikLogin();
}
}
/// <summary>
/// 清理所有正在使用的资源。
/// </summary>
protected void HikDispose(bool disposing)
{
if (m_lRealHandle >= 0)
{
CHCNetSDK.NET_DVR_StopRealPlay(m_lRealHandle);
}
if (m_lUserID >= 0)
{
CHCNetSDK.NET_DVR_Logout(m_lUserID);
}
if (m_bInitSDK == true)
{
CHCNetSDK.NET_DVR_Cleanup();
}
if (disposing)
{
if (components != null)
{
components.Dispose();
}
}
base.Dispose(disposing);
}
/// <summary>
/// Login
/// </summary>
protected void HikLogin()
{
if (m_lUserID < 0)
{
string DVRIPAddress = ConfigurationManager.AppSettings["HikIP"]; //设备IP地址或者域名
Int16 DVRPortNumber = Convert.ToInt16(ConfigurationManager.AppSettings["HikPort"]);//设备服务端口号
string DVRUserName = ConfigurationManager.AppSettings["UserName"];//设备登录用户名
string DVRPassword = ConfigurationManager.AppSettings["PassWord"];//设备登录密码
CHCNetSDK.NET_DVR_DEVICEINFO_V30 DeviceInfo = new CHCNetSDK.NET_DVR_DEVICEINFO_V30();
//登录设备 Login the device
m_lUserID = CHCNetSDK.NET_DVR_Login_V30(DVRIPAddress, DVRPortNumber, DVRUserName, DVRPassword, ref DeviceInfo);
if (m_lUserID < 0)
{
iLastErr = CHCNetSDK.NET_DVR_GetLastError();
str = "NET_DVR_Login_V30 failed, error code= " + iLastErr; //登录失败,输出错误号
MessageBox.Show(str);
return;
}
else
{
//登录成功
// MessageBox.Show("Login Success!");
// CustomMessageBox.Show("Login Success!");
// btnLogin.Text = "Logout";
}
}
else
{
//注销登录 Logout the device
if (m_lRealHandle >= 0)
{
MessageBox.Show("Please stop live view firstly");
return;
}
if (!CHCNetSDK.NET_DVR_Logout(m_lUserID))
{
iLastErr = CHCNetSDK.NET_DVR_GetLastError();
str = "NET_DVR_Logout failed, error code= " + iLastErr;
MessageBox.Show(str);
return;
}
m_lUserID = -1;
// btnLogin.Text = "Login";
}
return;
}
/// <summary>
/// HikPreview
/// </summary>
private void HikPreview( PictureBox pictrueBox )
{
if (m_lUserID < 0)
{
MessageBox.Show("Please login the device firstly");
return;
}
if (m_lRealHandle < 0)
{
CHCNetSDK.NET_DVR_PREVIEWINFO lpPreviewInfo = new CHCNetSDK.NET_DVR_PREVIEWINFO();
lpPreviewInfo.hPlayWnd = pictrueBox.Handle;//预览窗口
lpPreviewInfo.lChannel = 1;//预te览的设备通道
lpPreviewInfo.dwStreamType = 0;//码流类型:0-主码流,1-子码流,2-码流3,3-码流4,以此类推
lpPreviewInfo.dwLinkMode = 0;//连接方式:0- TCP方式,1- UDP方式,2- 多播方式,3- RTP方式,4-RTP/RTSP,5-RSTP/HTTP
lpPreviewInfo.bBlocked = true; //0- 非阻塞取流,1- 阻塞取流
lpPreviewInfo.dwDisplayBufNum = 1; //播放库播放缓冲区最大缓冲帧数
lpPreviewInfo.byProtoType = 0;
lpPreviewInfo.byPreviewMode = 0;
//if (textBoxID.Text != "")
//{
// lpPreviewInfo.lChannel = -1;
// byte[] byStreamID = System.Text.Encoding.Default.GetBytes(textBoxID.Text);
// lpPreviewInfo.byStreamID = new byte[32];
// byStreamID.CopyTo(lpPreviewInfo.byStreamID, 0);
//}
if (RealData == null)
{
RealData = new CHCNetSDK.REALDATACALLBACK(HikRealDataCallBack);//预览实时流回调函数
}
IntPtr pUser = new IntPtr();//用户数据
//打开预览 Start live view
m_lRealHandle = CHCNetSDK.NET_DVR_RealPlay_V40(m_lUserID, ref lpPreviewInfo, null/*RealData*/, pUser);
if (m_lRealHandle < 0)
{
iLastErr = CHCNetSDK.NET_DVR_GetLastError();
str = "NET_DVR_RealPlay_V40 failed, error code= " + iLastErr; //预览失败,输出错误号
MessageBox.Show(str);
return;
}
else
{
//预览成功
ButtonCameraSwitch.Text = "Stop";
pictrueBox.Visible = true;
}
}
else
{
//停止预览 Stop live view
if (!CHCNetSDK.NET_DVR_StopRealPlay(m_lRealHandle))
{
iLastErr = CHCNetSDK.NET_DVR_GetLastError();
str = "NET_DVR_StopRealPlay failed, error code= " + iLastErr;
MessageBox.Show(str);
return;
}
m_lRealHandle = -1;
ButtonCameraSwitch.Text = "Camera";
pictrueBox.Visible = false;
}
return;
}
/// <summary>
/// HikCallBack
/// </summary>
public void HikRealDataCallBack(Int32 lRealHandle, UInt32 dwDataType, IntPtr pBuffer, UInt32 dwBufSize, IntPtr pUser)
{
if (dwBufSize > 0)
{
byte[] sData = new byte[dwBufSize];
System.Runtime.InteropServices.Marshal.Copy(pBuffer, sData, 0, (Int32)dwBufSize);
string str = "实时流数据.ps";
FileStream fs = new FileStream(str, FileMode.Create);
int iLen = (int)dwBufSize;
fs.Write(sData, 0, iLen);
fs.Close();
}
}
5. 海康配置改为可在文件中更改
在FlightData.cs添加 using System.Configuration; 引用。然后在启动文件夹下找到exe.config后缀的文件,打开,找到<appSettings>字段,如下所示:
<appSettings>
<add key="UpdateLocationVersion" value="http://firmware.ardupilot.org/MissionPlanner/upgrade/version.txt" />
<add key="UpdateLocation" value="http://firmware.ardupilot.org/MissionPlanner/upgrade/" />
<add key="UpdateLocationMD5" value="http://firmware.ardupilot.org/MissionPlanner/checksums.txt" />
<add key="UpdateLocationZip" value="http://firmware.ardupilot.org/MissionPlanner/MissionPlanner-latest.zip" />
<add key="BetaUpdateLocationVersion" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/version.txt?tag=beta" />
<add key="BetaUpdateLocationMD5" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/checksums.txt?tag=beta" />
<add key="BetaUpdateLocationZip" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/MissionPlannerBeta.zip?tag=beta" />
<add key="MasterUpdateLocationMD5" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/checksums.txt?branch=master" />
<add key="MasterUpdateLocationZip" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/MissionPlannerBeta.zip?branch=master" />
<add key="ParameterLocations" value="https://raw.githubusercontent.com/ardupilot/ardupilot/ArduCopter-stable/ArduCopter/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/ArduSub-stable/ArduSub/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/ArduPlane-stable/ArduPlane/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/APMrover2-stable/APMrover2/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/AntennaTracker/Parameters.cpp;" />
<add key="ParameterLocationsBleeding" value="https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduCopter/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduSub/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduPlane/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/APMrover2/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/AntennaTracker/Parameters.cpp;" />
<add key="ParameterMetaDataXMLFileName" value="ParameterMetaData.xml" />
<add key="ParameterMetaDataXMLFileNameBackup" value="ParameterMetaDataBackup.xml" />
<add key="ClientId" value="zHTnuEq0RAWoLy5thcvTtMdwX7r6et2L3MAhxv8a0" />
<add key="ClientSecret" value="1ylYlXV4GuWJHIUywFg+XxE6hxsd3P/Dq5+J1PCUGxulC05/GC4Xpg==" />
<add key="AuthURL" value="https://auth.altitudeangel.com" />
<add key="APIURL" value="https://api.altitudeangel.com" />
<add key="ClientSettingsProvider.ServiceUri" value="" />
</appSettings>
在开始位置添加海康配置字段,如下:
<appSettings>
<add key="LocalIP" value="192.168.0.100"/>
<add key="HikIP" value="192.168.0.64"/>
<add key="UserName" value="admin"/>
<add key="PassWord" value="nanfoon51077533"/>
<add key="HikPort" value="8000"/>
<add key="UpdateLocationVersion" value="http://firmware.ardupilot.org/MissionPlanner/upgrade/version.txt" />
<add key="UpdateLocation" value="http://firmware.ardupilot.org/MissionPlanner/upgrade/" />
<add key="UpdateLocationMD5" value="http://firmware.ardupilot.org/MissionPlanner/checksums.txt" />
<add key="UpdateLocationZip" value="http://firmware.ardupilot.org/MissionPlanner/MissionPlanner-latest.zip" />
<add key="BetaUpdateLocationVersion" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/version.txt?tag=beta" />
<add key="BetaUpdateLocationMD5" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/checksums.txt?tag=beta" />
<add key="BetaUpdateLocationZip" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/MissionPlannerBeta.zip?tag=beta" />
<add key="MasterUpdateLocationMD5" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/checksums.txt?branch=master" />
<add key="MasterUpdateLocationZip" value="https://ci.appveyor.com/api/projects/meee1/missionplanner/artifacts/MissionPlannerBeta.zip?branch=master" />
<add key="ParameterLocations" value="https://raw.githubusercontent.com/ardupilot/ardupilot/ArduCopter-stable/ArduCopter/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/ArduSub-stable/ArduSub/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/ArduPlane-stable/ArduPlane/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/APMrover2-stable/APMrover2/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/AntennaTracker/Parameters.cpp;" />
<add key="ParameterLocationsBleeding" value="https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduCopter/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduSub/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/ArduPlane/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/APMrover2/Parameters.cpp; https://raw.githubusercontent.com/ardupilot/ardupilot/master/AntennaTracker/Parameters.cpp;" />
<add key="ParameterMetaDataXMLFileName" value="ParameterMetaData.xml" />
<add key="ParameterMetaDataXMLFileNameBackup" value="ParameterMetaDataBackup.xml" />
<add key="ClientId" value="zHTnuEq0RAWoLy5thcvTtMdwX7r6et2L3MAhxv8a0" />
<add key="ClientSecret" value="1ylYlXV4GuWJHIUywFg+XxE6hxsd3P/Dq5+J1PCUGxulC05/GC4Xpg==" />
<add key="AuthURL" value="https://auth.altitudeangel.com" />
<add key="APIURL" value="https://api.altitudeangel.com" />
<add key="ClientSettingsProvider.ServiceUri" value="" />
</appSettings>
找到之前添加的HikLogin(),找到如下代码:
string DVRIPAddress = "192.168.0.64"; //设备IP地址或者域名
Int16 DVRPortNumber = 8000;//设备服务端口号
string DVRUserName = "admin";//设备登录用户名
string DVRPassword = "nanfoon51077533";//设备登录密码
更改为:
string DVRIPAddress = ConfigurationManager.AppSettings["HikIP"]; //设备IP地址或者域名
Int16 DVRPortNumber = Int16.Parse( ConfigurationManager.AppSettings["HiPort"]);//设备服务端口号
string DVRUserName = ConfigurationManager.AppSettings["UserName"];//设备登录用户名
string DVRPassword = ConfigurationManager.AppSettings["PassWord"];//设备登录密码
实际运行效果:
6. 双击窗体弹出新界面
通过新建窗体来承载弹出的新视频界面,弹出后阴藏地图上的相机按钮来防止用户干扰,关闭弹出的窗口后返回至地图页显示。
在FlightData.cs文件里面的海康威视代码区域增加图像picturebox的双击事件函数:
private void PictureBoxHikVisionCameraOnMap_DoubleClick(object sender, System.EventArgs e)
{
}
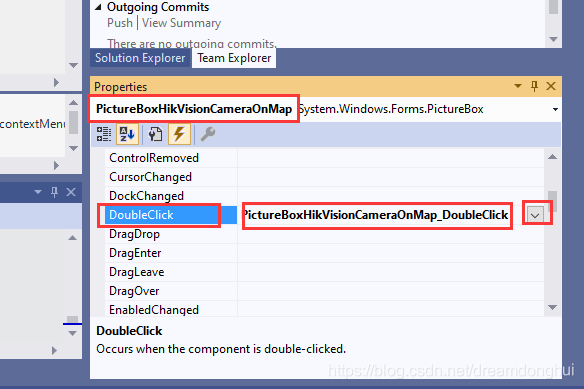
返回到设计窗体选中海康的picturebox空间,在右下角的属性中选中事件栏,找到doubleclick项,在下拉菜单里面选中刚才写的事件函数名,链接事件。
代码写完之后如下:
/// <summary>
/// Double click event , to Pop the free moved Hik camera windows.
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void PictureBoxHikVisionCameraOnMap_DoubleClick(object sender, System.EventArgs e)
{
// CustomMessageBox.Show("Double click trigered"); // test the trigger event.
Form PupHikForm = new Form(); //creat the new from.
PupHikForm.ShowIcon = false;
PupHikForm.Text = "Flotilla-HikVision";
PupHikForm.FormClosed += new FormClosedEventHandler(PuphikForm_FormClosed); //the close event.
PictureBox PupHikFormPictureBox = new PictureBox();
PupHikFormPictureBox.BackColor = Color.DeepPink; // to test the Pic box.
PupHikFormPictureBox.Size = PupHikForm.Size;
//to auto size with the Form.
PupHikFormPictureBox.Anchor = ( AnchorStyles.Top|AnchorStyles.Bottom|AnchorStyles.Left|AnchorStyles.Right);
PupHikForm.Controls.Add(PupHikFormPictureBox); // Add the pic in form
ButtonCameraSwitch.PerformClick(); //close the on map picbox by trigger the button event mannuely.
HikLogin(); // Login again
HikPreview(PupHikFormPictureBox); //preview
ButtonCameraSwitch.Visible = false;
PupHikForm.Show();
}
/// <summary>
/// close event
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void PuphikForm_FormClosed(Object sender, FormClosedEventArgs e)
{
PictureBoxHikVisionCameraOnMap.Visible = true;
HikPreview(PictureBoxHikVisionCameraOnMap);//call it two times to avoid the logic conflict.
HikPreview(PictureBoxHikVisionCameraOnMap);
ButtonCameraSwitch.Visible = true;
}

















 1218
1218

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









