








KDTree
Open3D使用FLANN来快速创建KDTrees。
#src/Python/Tutorial/Basic/kdtree.py
import sys
import numpy as np
sys.path.append("../..")
from py3d import *
if __name__ =="__main__":
print("Testing kdtree in py3d...")
print("Load a point cloud and paint itgray.")
pcd =read_point_cloud("../../TestData/Feature/cloud_bin_0.pcd")
pcd.paint_uniform_color([0.5, 0.5, 0.5])
pcd_tree = KDTreeFlann(pcd)
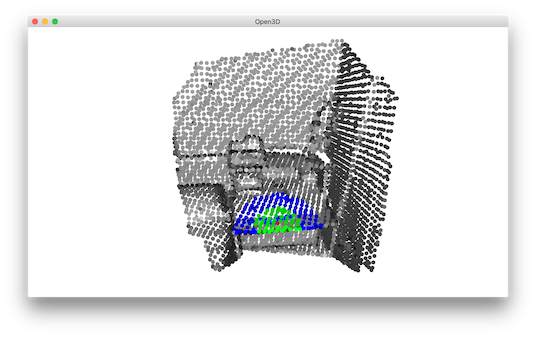
print("Paint the 1500th pointred.")
pcd.colors[1500] = [1, 0, 0]
print("Find its 200 nearest neighbors,paint blue.")
[k, idx, _] =pcd_tree.search_knn_vector_3d(pcd.points[1500], 200)
np.asarray(pcd.colors)[idx[1:], :] = [0, 0,1]
print("Find its neighbors withdistance less than 0.2, paint green.")
[k, idx, _] = pcd_tree.search_radius_vector_3d(pcd.points[1500],0.2)
np.asarray(pcd.colors)[idx[1:], :] = [0, 1,0]
print("Visualize the pointcloud.")
draw_geometries([pcd])
print("")
从point cloud来创建KDTree
print("Testingkdtree in py3d ...")
print("Load apoint cloud and paint it gray.")
pcd =read_point_cloud("../../TestData/Feature/cloud_bin_0.pcd")
pcd.paint_uniform_color([0.5,0.5, 0.5])
pcd_tree =KDTreeFlann(pcd)
上述脚本读取point cloud并构建一个KDTree。这是预处理步骤,对下述处理来说。
查找近邻点
print("Paintthe 1500th point red.")
pcd.colors[1500] =[1, 0, 0]
找到1500-th point,然后设定其像素值。
用search_knn_vector_3d
print("Findits 200 nearest neighbors, paint blue.")
[k, idx, _] =pcd_tree.search_knn_vector_3d(pcd.points[1500], 200)
np.asarray(pcd.colors)[idx[1:],:] = [0, 0, 1]
函数search_knn_vector_3d返回anchor point的k近邻的list。
用search_radius_vector_3d
print("Findits neighbors with distance less than 0.2, paint green.")
[k, idx, _] =pcd_tree.search_radius_vector_3d(pcd.points[1500], 0.2)
np.asarray(pcd.colors)[idx[1:],:] = [0, 1, 0]















 1056
1056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









