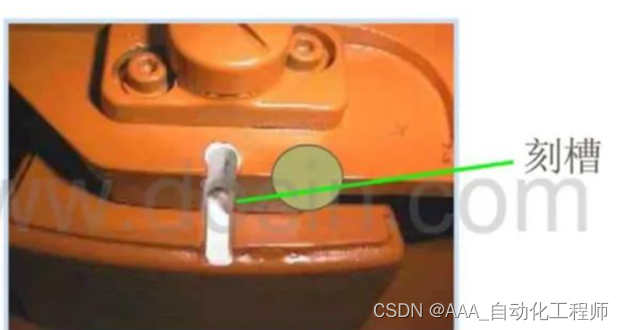
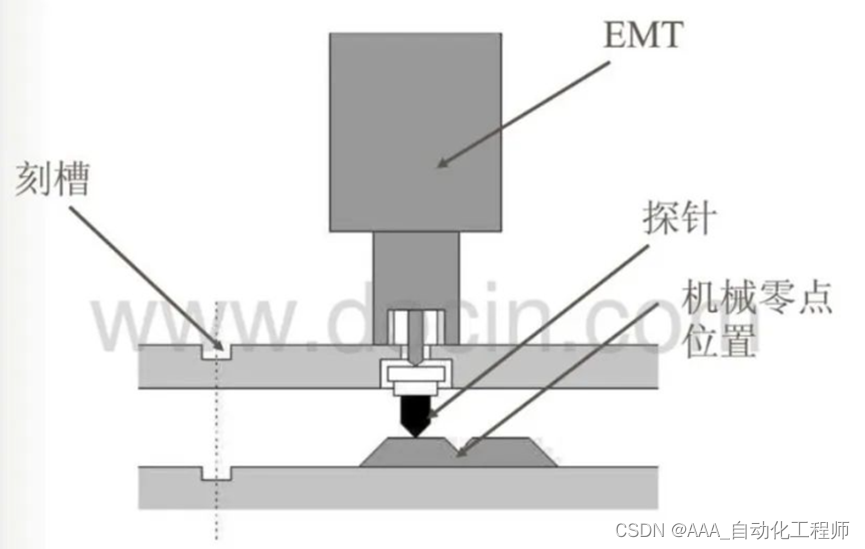
KUKA机器人零点标定的具体方法 在进行机器人校正时,先将各轴置于一个定义好的机械位置,即所谓的机械零点。这个机械零点位置表明了同轴的驱动角度之间的对应关系,它用一个测量刻槽表示。 为了精确地确定机器人某根轴的机械零点位置,一般应先找到其预校正位置,然后去掉测量头的保护盖,并装上EMT(千分表), 机器人的校正必须始终在同样的温度条件下进行,以避免由于热膨胀而引起的误差。 校正时,各轴必须从+ 到 -查找零点,如果必须由 – 到+


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了KUKA机器人零点标定的过程,包括首次校正、工具学习、检查运行(负荷校正)和恢复校正等步骤,强调了在校正过程中需在恒温条件下进行,以确保精度。
本文详细介绍了KUKA机器人零点标定的过程,包括首次校正、工具学习、检查运行(负荷校正)和恢复校正等步骤,强调了在校正过程中需在恒温条件下进行,以确保精度。



 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1万+
1万+







