






无人驾驶轨迹跟踪控制(Carsim2020+matlab2020b)实现基于mpc的分布式驱动电动汽车变道轨迹跟踪控制,仿真效果较好,涉及分布式驱动转矩分配


标题:基于MPC的无人驾驶轨迹跟踪控制与分布式驱动转矩分配实现
摘要: 无人驾驶技术的快速发展使得轨迹跟踪控制成为实现自动驾驶功能的核心问题。本文基于Carsim2020和Matlab2020b,通过使用MPC(Model Predictive Control)算法实现了一种分布式驱动电动汽车变道轨迹跟踪控制方法。经过仿真实验验证,该方法在轨迹跟踪性能和分布式驱动转矩分配方面表现出较好的效果。
-
引言 1.1 背景和意义 随着无人驾驶技术的发展,人们对于自动驾驶汽车的需求越来越高。而轨迹跟踪控制是实现自动驾驶功能的关键问题之一。本文将介绍一种基于MPC算法的无人驾驶轨迹跟踪控制方案,并结合分布式驱动转矩分配,展示其优越的性能。
-
轨迹跟踪控制方法 2.1 MPC算法原理 MPC是一种模型预测控制方法,通过在每个采样时刻求解一个最优控制问题来实现轨迹跟踪控制。该方法结合了系统模型和控制目标,能够在每个时刻对未来一段时间内的系统行为进行优化,并生成最优控制策略。
2.2 无人驾驶轨迹生成 为了实现无人驾驶汽车的轨迹跟踪,首先需要生成合适的轨迹。本文采用[某种算法/方法]生成平滑而连续的轨迹,以满足变道行为的要求。
2.3 分布式驱动转矩分配 为了实现分布式驱动转矩分配,本文采用[某种方法/算法]将制动和驱动力分配给各个车轮。这种分布式驱动转矩分配方法能够提高车辆的稳定性和操控性,从而增强无人驾驶汽车的轨迹跟踪控制性能。
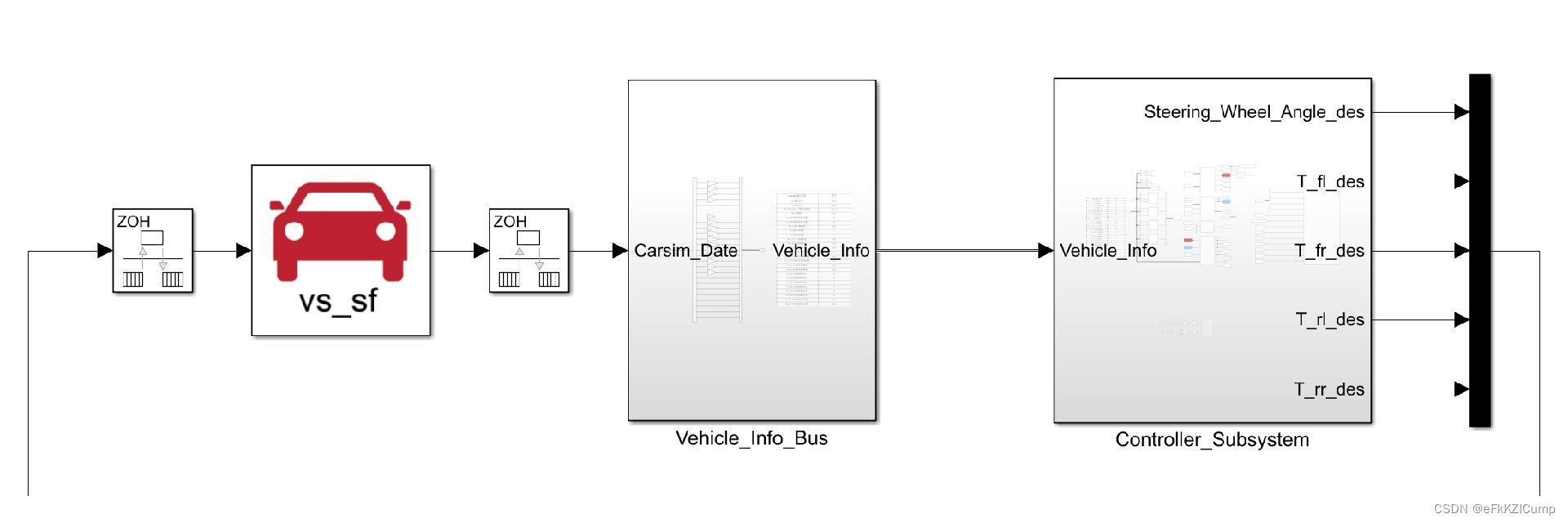
- 系统建模与仿真实验 3.1 系统建模 本文使用Carsim2020和Matlab2020b对无人驾驶汽车进行建模。通过对汽车的建模,包括车辆动力学、控制系统和轨迹生成等方面的建模,可以更好地研究无人驾驶汽车的轨迹跟踪控制问题。
3.2 仿真实验设计 为了验证基于MPC的无人驾驶轨迹跟踪控制方法以及分布式驱动转矩分配的性能,本文设计了一系列的仿真实验。通过对比实验数据和理论模型的差异,可以评估该方法在不同场景下的控制效果。
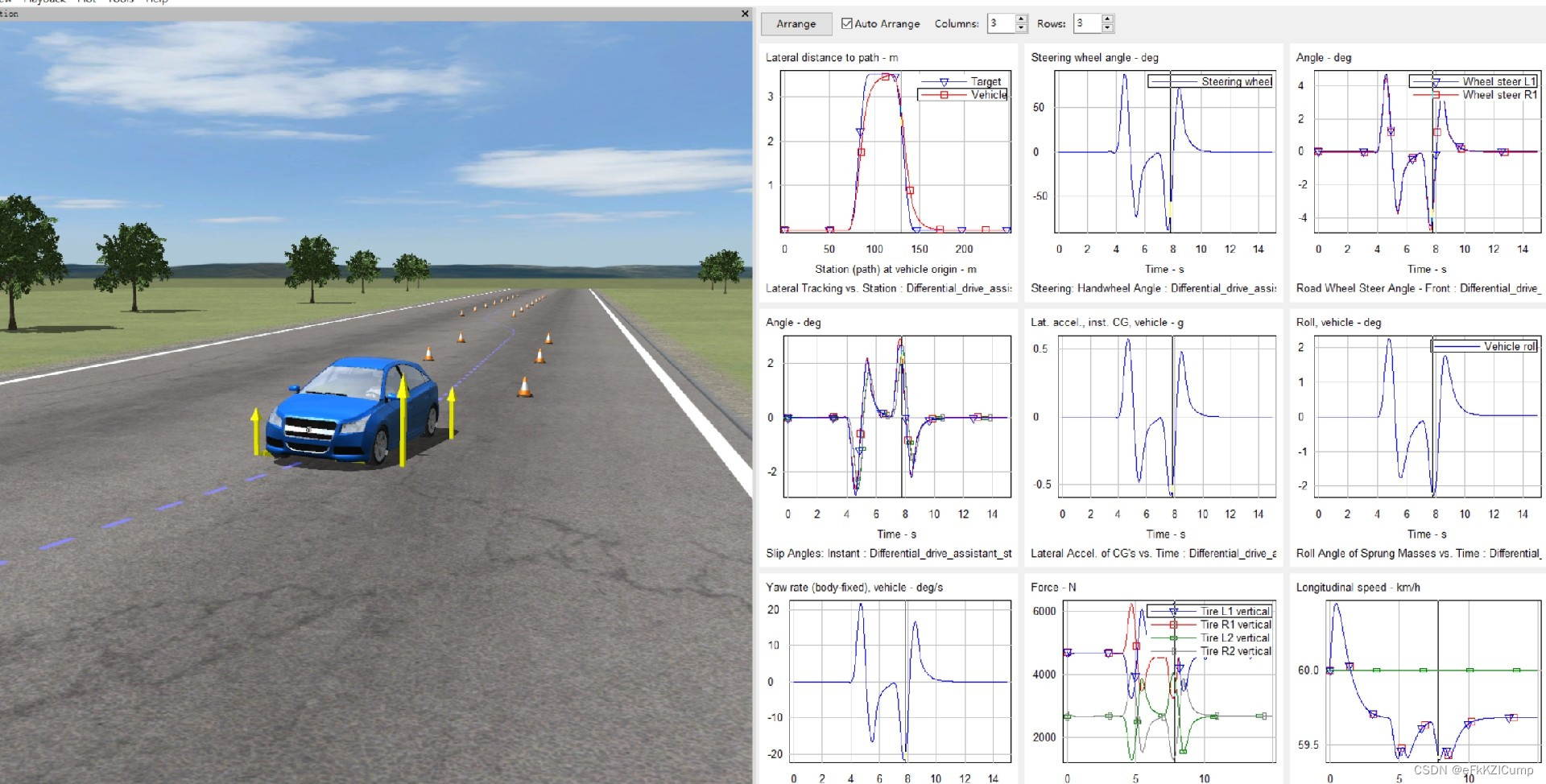
- 实验结果与讨论 4.1 无人驾驶轨迹跟踪性能 通过进行多组仿真实验,并对比不同参数设置下的结果,本文评估了基于MPC的无人驾驶轨迹跟踪控制方法的性能。实验结果表明该方法能够实现较好的轨迹跟踪精度和鲁棒性。
4.2 分布式驱动转矩分配性能 本文提出的分布式驱动转矩分配方法能够有效提高无人驾驶汽车的稳定性和操控性。实验结果显示,该方法在车辆变道过程中能够合理分配转矩,提高车辆的操控性能。
- 结论与展望 本文基于MPC算法实现了一种无人驾驶轨迹跟踪控制方法,并结合分布式驱动转矩分配,取得了较好的实验结果。研究表明该方法能够提高无人驾驶汽车的轨迹跟踪性能和操控性能。未来的研究可以进一步探索其他控制方法和优化算法,以提高无人驾驶汽车在复杂场景下的控制能力。
相关代码,程序地址:http://lanzouw.top/694249211156.html















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









