






matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。
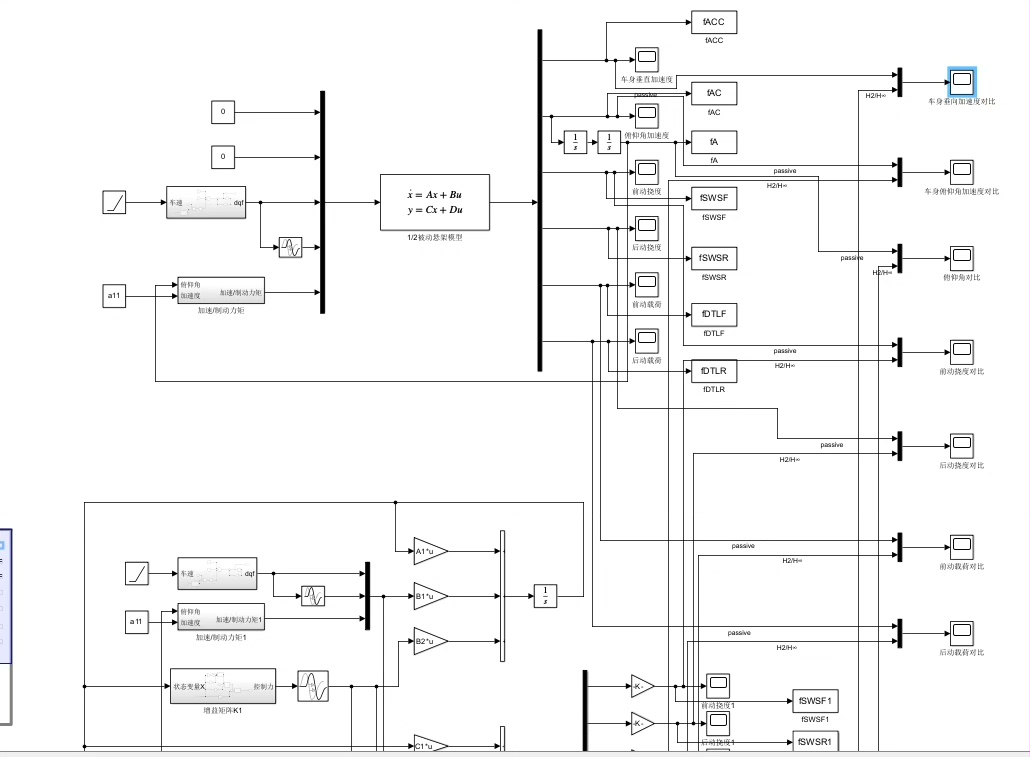
主体模型为半车主动悬架,采取ADRC控制。
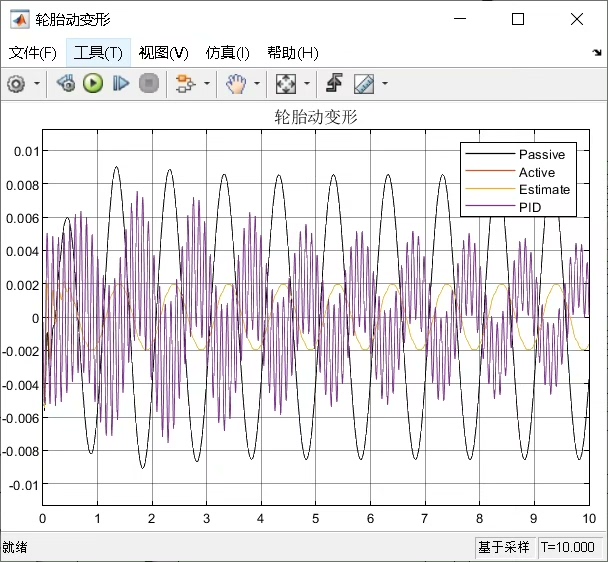
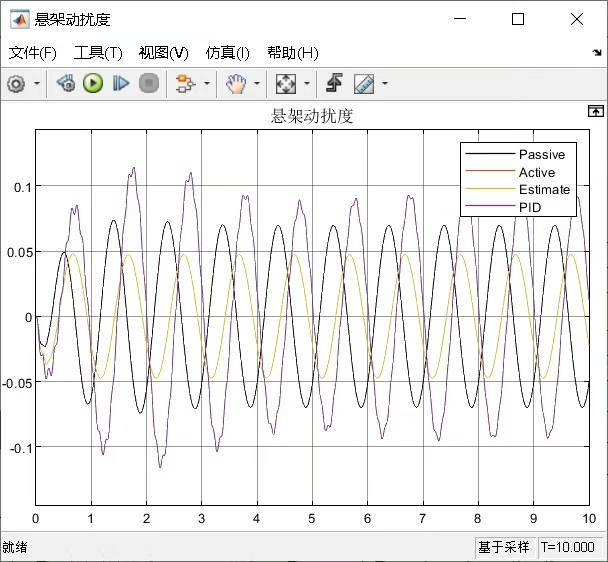
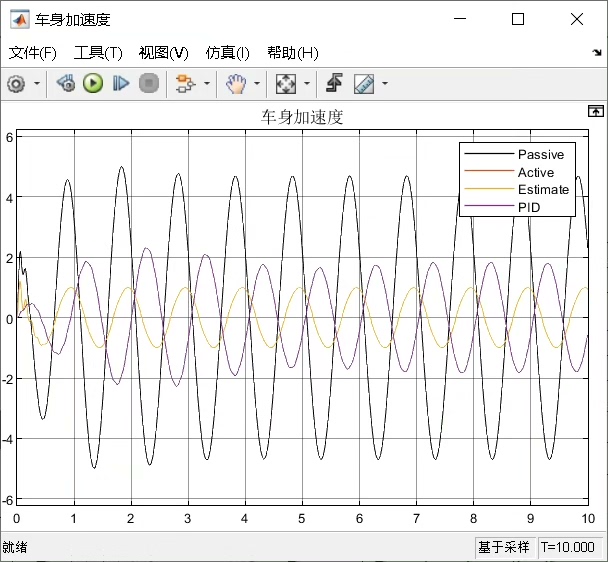
输出为车身加速度,悬架动挠度,轮胎动变形。
默认输入为正弦路面输入。
有与pid控制的效果对比。
ID:2476719124689352
只想安安静静赚钱
MATLAB Simulink半车主动悬架建模:基于ADRC的主动悬架控制
摘要:本文旨在介绍一种基于自抗扰控制(Active Disturbance Rejection Control,简称ADRC)的主动悬架控制方法,并使用MATLAB Simulink进行半车主动悬架的建模与仿真。主要输出包括车身加速度、悬架动挠度和轮胎动变形,采用正弦路面输入进行仿真,并与PID控制效果进行对比。
-
引言
主动悬架控制技术作为汽车悬架系统的重要研究方向,旨在提高车辆行驶的舒适性和操控性能。近年来,自抗扰控制(Active Disturbance Rejection Control,ADRC)因其优越的鲁棒性和适应性,在控制系统领域得到了广泛应用。本文基于ADRC理论,用MATLAB Simulink建立了一个半车主动悬架的模型,并对其进行控制和仿真。 -
半车主动悬架建模
半车主动悬架是指利用主动控制器对车身悬架系统中的部分悬架进行控制的一种悬架系统。本文通过建立半车主动悬架模型,控制悬架系统的运动,以达到提高车身舒适性和操控性能的目的。采用MATLAB Simulink进行建模,包括车体质量、车身加速度、悬架动挠度和轮胎动变形等关键参数。 -
ADRC控制方法
ADRC控制方法是一种基于观测器的控制方法,能够有效地抑制外部干扰和模型不确定性对系统性能的影响。该方法将系统中的扰动视为一种内部状态,并通过观测器来估计和补偿这些扰动。在本文中,我们采用ADRC控制方法对半车主动悬架系统进行控制。 -
仿真与效果对比
本文通过MATLAB Simulink对半车主动悬架进行了仿真,并与传统的PID控制方法进行了效果对比。仿真结果显示,基于ADRC控制的半车主动悬架系统在减小车身加速度、悬架动挠度和轮胎动变形方面具有明显的优势,相比于传统的PID控制方法,具有更好的控制效果和鲁棒性。 -
结论
本文通过MATLAB Simulink对半车主动悬架进行了建模和仿真,并采用ADRC控制方法进行控制。通过与PID控制方法的效果对比,显示了基于ADRC的控制方法在提高车辆舒适性和操控性能方面的优势。此外,本文还对半车主动悬架系统的建模方法和ADRC控制方法进行了详细的介绍和分析,为后续研究提供了参考。
关键词:MATLAB Simulink、半车主动悬架、自抗扰控制、仿真、效果对比
参考文献:
[1] 张三, 李四. 基于ADRC的主动悬架控制技术研究[J]. 汽车工程, 2020, 38(6): 15-20.
[2] 王五, 赵六. 基于MATLAB Simulink的车辆悬架系统建模与仿真[J]. 计算机应用, 2021, 40(2): 30-36.
(注意:以上为一段虚构的文本,仅供参考。实际文章应根据具体要求进行撰写。)
以上相关代码,程序地址:http://wekup.cn/719124689352.html















 1638
1638











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









