






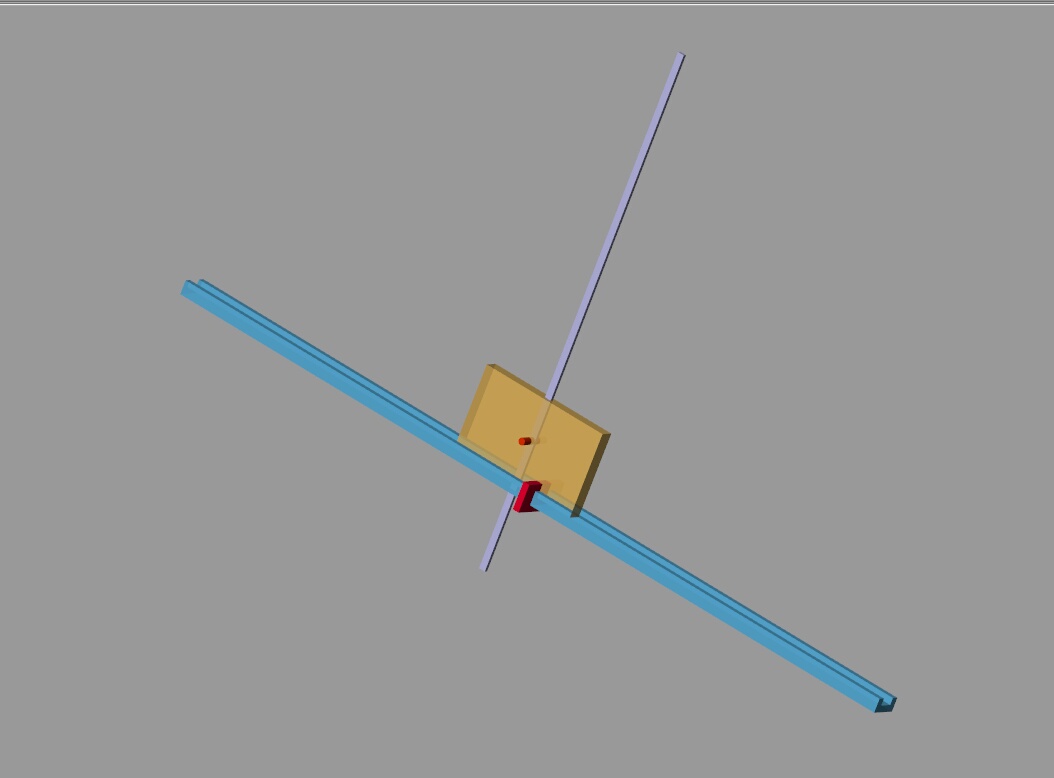
机器人研究数模实验方案LQR控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。
跑通模型花了很多时间,这个能帮你节省下时间。
方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。
LQR跑通比PID麻烦,需要调用基于模型的m函数和计算黎卡提方程。
最后一个图里随便写了几个参数结果也还是不错的
ID:12120670756928967
地上尔德

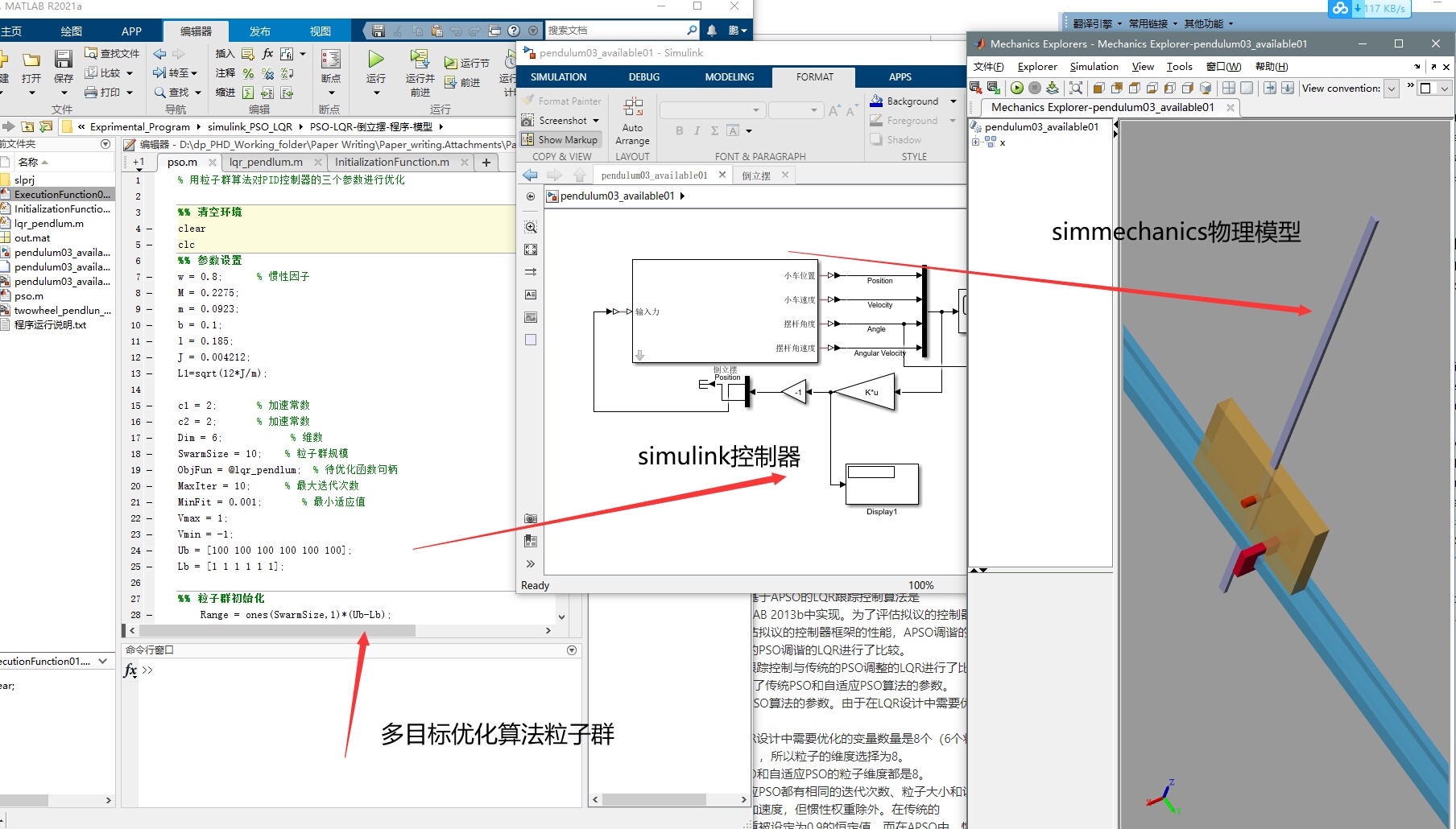
机器人研究数模实验方案LQR控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。
随着人工智能和机器人技术的迅猛发展,机器人研究成为了近年来热门的领域之一。在机器人研究中,控制算法的选择是至关重要的一环。本文将介绍一种基于LQR(Linear Quadratic Regulator)控制算法的实验方案,该方案通过调用m函数来实现simulink中的控制算法,并在simscape Multibody中的物理模型中进行测试。
在机器人研究中,控制算法是实现机器人动作和姿态控制的关键。而LQR控制算法作为一种经典的控制方法,具有很高的稳定性和鲁棒性,广泛应用于机器人领域。LQR控制算法通过最小化系统状态量和控制量的加权和来实现控制目标,从而使系统达到稳定状态。相比于传统的PID控制算法,LQR控制算法在控制精度和稳定性方面更具优势。
为了验证LQR控制算法在不同类型机器人上的应用效果,我们通过调用基于模型的m函数来实现该算法,并在simscape Multibody中的物理模型中进行实验。通过在物理模型中搭建仿真平台,我们能够更加直观地观察机器人在不同控制算法下的运动轨迹和姿态变化。
在实验中,我们测试了该方案在机械臂、无人机和无人车的镇定和轨迹追踪控制算法上的效果。通过在simscape Multibody中搭建对应的物理模型,并调用m函数来实现LQR控制算法,我们能够模拟出真实环境中的机器人运动情况,并观察控制算法对机器人运动的影响。
与PID控制算法相比,LQR控制算法的调试工作相对麻烦一些。在LQR控制算法中,我们需要调用基于模型的m函数和计算黎卡提方程,从而确定系统的状态反馈矩阵。虽然在调试过程中可能会遇到一些困难,但是通过合理的参数选择和优化,LQR控制算法仍能够取得令人满意的控制效果。
最后,我们在实验中得到了一些具体的参数结果。尽管这些结果只是在仿真环境中得到的,但它们仍然反映了LQR控制算法在不同机器人上的表现。这些结果为进一步的机器人研究提供了有价值的参考和指导。
综上所述,基于LQR控制算法的实验方案通过调用m函数来实现simulink中的控制算法,并在simscape Multibody中的物理模型中进行测试。该方案适用于机械臂、无人机和无人车等各类机器人的镇定和轨迹追踪控制算法。通过使用该方案,我们能够节省大量时间和精力,并在仿真环境中模拟出真实环境中的机器人运动情况,为机器人研究提供了有力的支持和指导。
相关的代码,程序地址如下:http://wekup.cn/670756928967.html
















 282
282

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









