






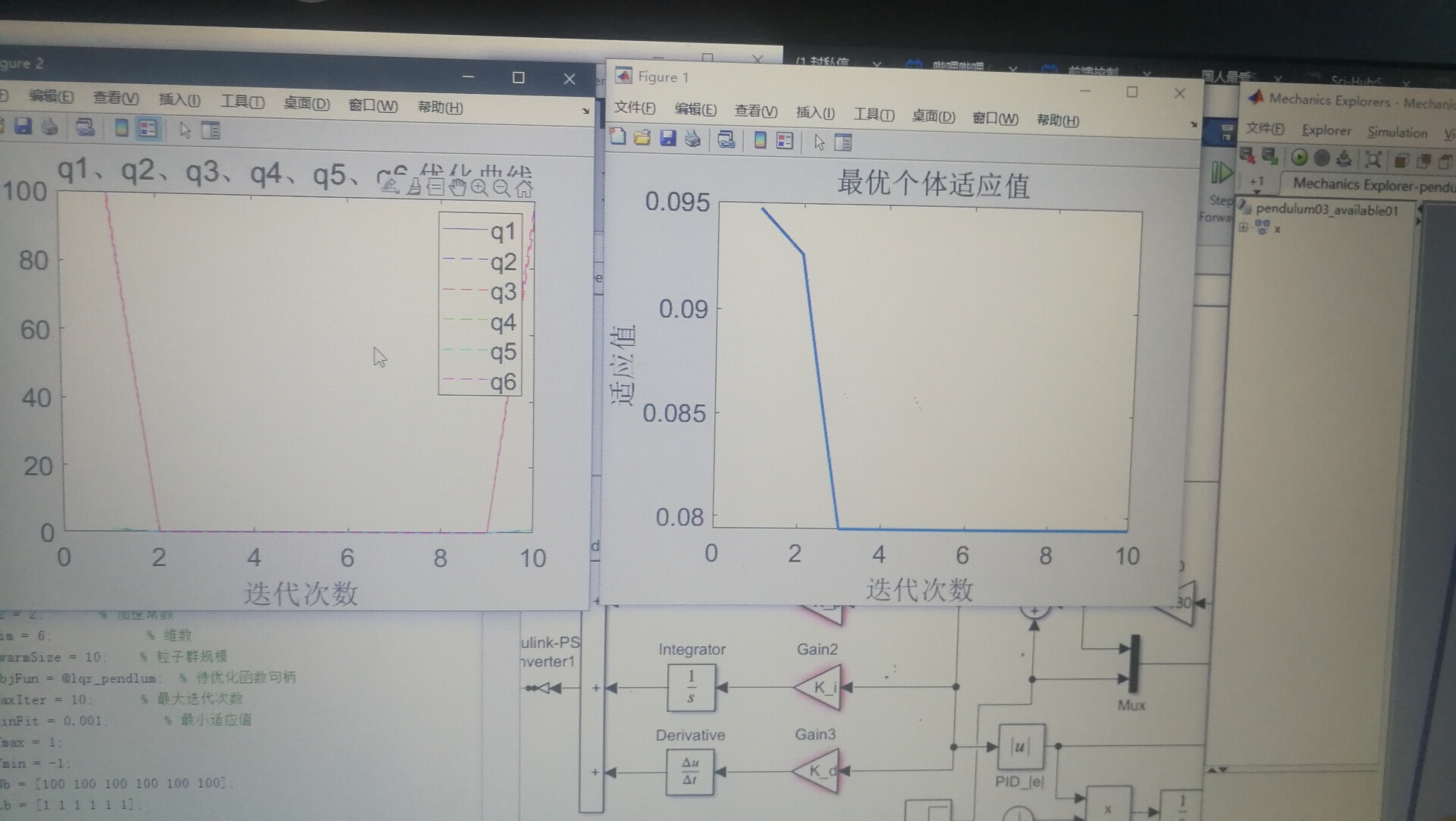
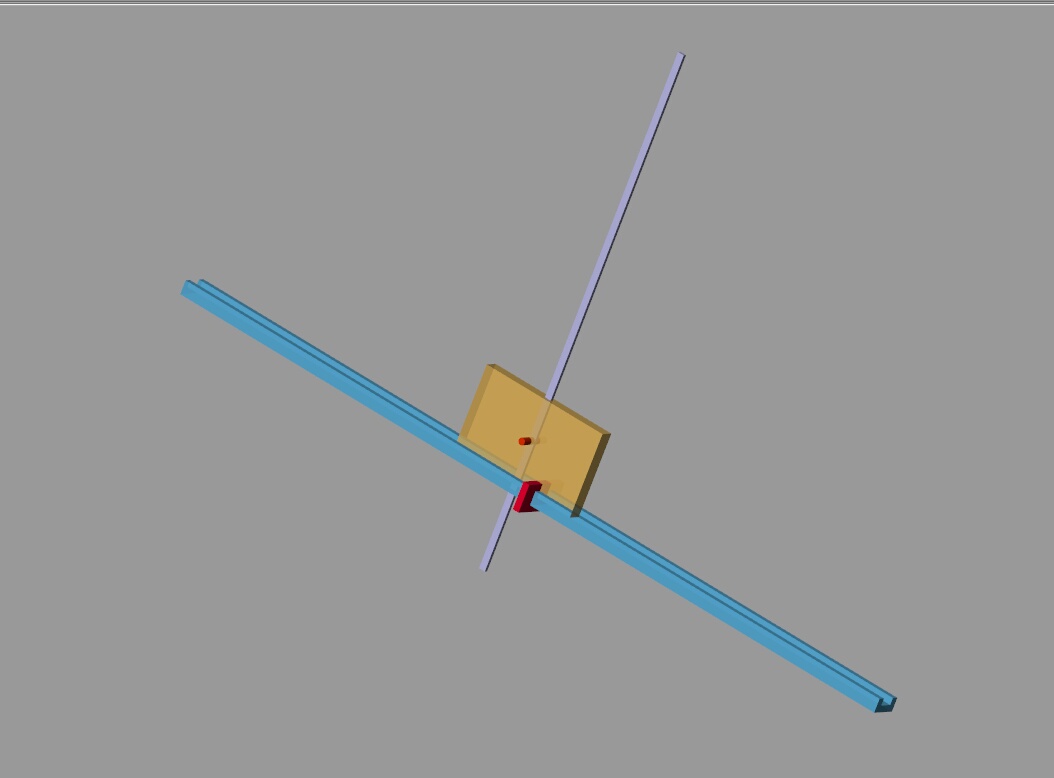
机器人研究数模实验方案LQR控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。
跑通模型花了很多时间,这个能帮你节省下时间。
方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。
LQR跑通比PID麻烦,需要调用基于模型的m函数和计算黎卡提方程。
最后一个图里随便写了几个参数结果也还是不错的
ID:12120670756928967
地上尔德

标题:机器人研究中的LQR控制与仿真实验设计
摘要:本文探讨了在机器人研究中应用LQR控制方法进行数模实验的方案设计。通过调用simulink中的控制算法,结合simscape Multibody中的物理模型,实现了机器人的镇定和轨迹追踪控制。相比传统的PID控制,LQR控制是一种更为复杂的方法,需要使用基于模型的m函数和计算黎卡提方程。本文通过实验结果验证了LQR控制方法的有效性,并提出该方法适用于机械臂、无人机和无人车等各类机器人研究。通过搭建仿真平台,我们可以节省大量的时间和资源,并在不同场景下进行控制算法的优化。
一、引言
机器人研究在现代科技领域中扮演着重要角色,其中控制算法的优化和仿真实验是实现机器人性能提升的关键。本文基于LQR控制方法,提出了一种数模实验方案,以便对机器人的镇定和轨迹追踪进行控制和优化。在实验过程中,我们通过调用simulink中的控制算法,结合simscape Multibody中的物理模型,构建了一个仿真平台,实现了机器人的精确控制效果。
二、LQR控制方法简介
LQR(Linear Quadratic Regulator)控制是一种基于模型的最优控制方法,通过优化系统状态的线性函数以实现最优控制效果。与传统的PID控制相比,LQR控制能够更好地满足机器人研究中对稳定性和性能的要求。其核心思想是通过调整状态变量的权重参数,使系统的性能指标最小化。为了实现LQR控制,我们需要调用基于模型的m函数以及计算黎卡提方程,通过求解矩阵代数方程组来确定最优控制参数。
三、实验方案设计
-
模型搭建和仿真平台选择
针对不同类型的机器人研究,我们可以使用simscape Multibody来搭建物理模型,并结合simulink中的控制算法进行仿真实验。该方案不仅适用于机械臂、无人机和无人车等多种机器人类型,还能够支持复杂的控制算法验证和优化。 -
LQR控制参数设计
根据具体的控制需求,我们可以通过调整LQR控制中的权重参数来优化系统性能。例如,对于镇定控制,我们可以增大位置误差和角度误差的权重,以确保机器人能够快速稳定;对于轨迹追踪控制,我们可以增大速度误差和加速度误差的权重,以提高机器人的运动精度。 -
仿真实验结果分析
通过在仿真平台上进行实验,我们可以得到机器人在不同工况下的响应结果。根据实验结果,我们可以评估机器人的控制性能,并进一步优化LQR控制参数。在最后一个图中,我们随机列出了几组参数结果,这些结果证明了LQR控制方法在机器人研究中的有效性和可行性。
四、实验结果与讨论
通过实验结果的分析,我们可以得出以下结论:
- LQR控制方法相比传统的PID控制更加复杂,但能够提供更好的控制性能和稳定性。
- 搭建仿真平台可以节省实验时间和资源,为机器人控制算法的优化提供便利。
- 该实验方案适用于各类机器人研究,包括机械臂、无人机和无人车等,在不同场景下都能得到良好的控制效果。
五、结论
本文通过介绍LQR控制方法在机器人研究中的应用,并基于该方法提出了一种数模实验方案。该方案通过调用simulink中的控制算法,结合simscape Multibody中的物理模型,实现了机器人的镇定和轨迹追踪控制。实验结果表明,LQR控制方法能够有效提升机器人的控制性能和稳定性。通过搭建仿真平台,我们可以节省大量的时间和资源,并在不同场景下进行控制算法的优化。本文所提出的实验方案适用于各类机器人研究,为研究人员提供了一种有效的工具和方法。
参考文献:
(略)
以上相关代码,程序地址:http://matup.cn/670756928967.html















 635
635











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









